Do not use the TOPODRONE LiDAR in any way not described in this manual or the user's guide.
Do not subject TOPODRONE LiDAR to shock or vibration, especially when the unit is turned on.
Do not place TOPODRONE LiDAR in direct sunlight, in places with poor ventilation, or near a source of heat or cold.
Do not fully or partially submerge the laser scanner in water or expose the product to heavy rain, snow, sand, or dust for extended periods of time.
Do not insert foreign objects into the memory card, LEMO 6-Pin and external GNSS antenna slots, or install the memory card upside down or attempt to connect incompatible slots.
Do not insert or remove the MicroSD card while the TOPODRONE LiDAR is operating, as this may cause the card to malfunction and/or data loss.
**Safe storage of TOPODRONE LiDAR.**When the TOPODRONE LiDAR is not in use, it is recommended to store the device in a room with a relative humidity of 40% or less and a temperature of 20±5°C.
If the TOPODRONE LiDAR gets wet from rain, snow or fog during operation, wipe it with a clean, dry paper or microfiber cloth. Then leave it in a dry room for an hour to dry completely.
**Technological requirements**TOPODRONE LiDAR operate using PPK technology and require GNSS data for the duration of their operation from the base station for data post-processing.
To obtain correct data from TOPODRONE LiDAR it is necessary to have a quality GNSS signal during operation, both for the geodetic receiver and for the base station.
The manufacturer does not guarantee the performance of TOPODRONE LiDAR in case of intentional or accidental violation of any of the requirements described above.
# TOPODRONE LiDAR design and overview TOPODRONE LiDAR 100/100+/200+ is a multifunctional device designed for airborne and mobile laser scanning (ALS and MLS) of the earth's surface. The main task of the TOPODRONE LiDAR is to acquire data to generate a dense cloud of terrain points, which in turn allows the classification and processing of this data. The obtained data can be used for various tasks such as geodesy, cartography, volume measurement, taxation and monitoring of various objects. TOPODRONE LiDAR can operate in a variety of environments, including dense grass, forest or urban areas, under all lighting conditions. However, for effective operation of TOPODRONE LiDAR it is necessary to have sufficient Global Navigation Satellite Systems (GNSS) signal. The use of SLAM technology in the post-processing software TOPODRONE Post Processing allows you to get highly accurate data even in the presence of a weak GNSS signal on the main trajectory. In the process, to obtain optimal results, the laser scanner should cover certain areas of the ground surface with at least 30% overlap (106 degrees under the UAV in VLS, and 360 degrees around in MLS). Subsequently, the data from the laser scanner are processed sequentially in several software to equalize the data, align the scans, filter out noise, classify the point cloud, and produce the final materials:1 1\. TOPODRONE Post Processing, which calculates a high-precision laser scanner trajectory, generates a dense raw point cloud and initially aligns the scans to each other (Strip Alignment). 2\. LiDAR360 software, which performs high-precision alignment of scans to each other (Strip Alignment) and applies several filters to reduce noise and improve the accuracy of the final point cloud. LiDAR360 software can then classify the point cloud and generate final materials (DEM, DEM, etc.). Further post-processing of data from TOPODRONE LiDAR is performed in the software that is necessary to fulfill the final tasks for a particular user. Application of SLAM technology in TOPODRONE Post Processing software allows you to get highly accurate data even in the presence of weak GNSS signal on the main trajectory. TOPODRONE PPK GNSS receiver integrated into TOPODRONE LiDAR, together with high-precision inertial measurement unit (IMU) allows to obtain high-precision coordinates of the TOPODRONE LiDAR trajectory after post-processing, as well as high-precision coordinates of photo centers from TOPODRONE P24 / P61 cameras, synchronizing both devices by cable. GNSS receiver records “raw” GNSS measurements in **\*.UBX** format and time stamps of the TOPODRONE P24 / P61 camera shutter, if it is connected.Operation of TOPODRONE LiDAR without GNSS signal is not possible.
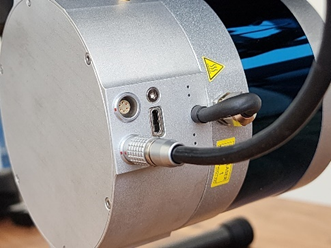
##### TOPODRONE LiDAR 100 / 100+ / 200+ is based on the following modules and systems: 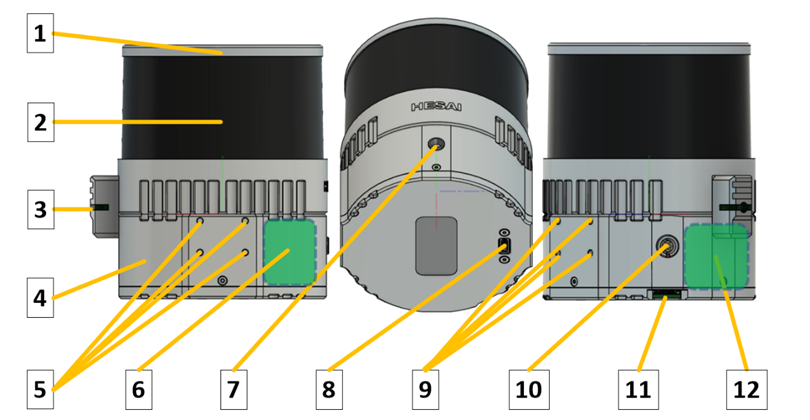 1. LiDAR sensor housing; 2. Sensor lens; 3. Operation status LED; 4. TOPODRONE LiDAR housing; 5. Mounting holes with M3 thread; 6. High precision inertial measurement unit (IMU); 7. LEMO FFA.00 connector for external GNSS antenna cable connection; 8. USB Type-C 2.0 connector; 9. Mounting holes with M3 thread; 10. LEMO 6 pin connector; 11. Micro-SD memory card slot; 12. GNSS receiver TOPODRONE. ##### Description of TOPODRONE LiDAR 100 / 100+ / 200+ components: 1\. LiDAR Hesai sensor housing. Made of aluminium alloy, coated with grey enamel. During operation, the housing may slightly vibrate and make sounds and may heat up to 60°C. This effect is caused by the rotation of the scanning units of the laser heads inside the case, as well as heat dissipation from the working internal components. 2\. LiDAR Hesai sensor lens. It is made of glass with polymer anti-reflective coating. It acts as a filter that transmits light only in the working wavelengths of the laser, as well as mechanical protection of the scanning rotating laser heads of the sensor. The coating of the laser scanning sensor lens is vulnerable to scratching and chipping. It is strongly recommended that the TOPODRONE LiDAR lens be treated with care and not be operated under conditions that could damage or scratch the surface of the laser scanning sensor. If scratches and damage occur, the quality of the acquired data may deteriorate. Individual single minor scratches do not generally reduce the quality of the data. 3\. TOPODRONE LiDAR status LED. Displays the current operating status of the device. Below is the decoding of the light signals:| **Switching on and off** | ||
| 1 | Infrequent **green **flashes | Charging Ionistors Normal ~10 seconds |
| 2 | Flashing **green** | Linux booting Normal ~20 seconds |
| 3 | Flashing **red**, siren | After 1 minute of flashing green Linux failed to boot Problem with image or flash drive |
| 4 | **Green** | Linux booted, waiting for services Normal ~10 seconds |
| 5 | Rapid flashing **green** | After power off, shutdown. Normal ~10 seconds |
| **Waiting for and recording data** | ||
| 6 | **Green** | System initialisation |
| 7 | Siren, flashing **red** | Hardware problem with Ublox or IMU |
| 8 | **Green **flashing **orange** | Waiting for GNSS signal The better the signal, the faster the flicker |
| 9 | **Green** | Time setting Normally ~ 1 c |
| 10 | **Green** flashing **blue** | Start recording Normally ~ 10 s |
| 11 | Triple signal, **blue** | Recording |
| **Copying data (after connecting a USB stick)** | ||
| 12 | **Green** | Recording stopped Normal ~ 1 c |
| 13 | Flashing **crimson**, rising tone signal | Start copying |
| 14 | One flash **red**, siren | Error mounting the USB stick Faulty USB stick or file system |
| 15 | Two flashes **red**, siren | Not enough space on the USB stick |
| 16 | Flashing **crimson** | Copying data Flickering speeds up during copying process |
| 17 | Fast flashing red, siren | Write error |
| 18 | Green, decreasing tone signal | All data copied |
| 1 | TOPODRONE LiDAR |
| 2 | Protective cover for the laser scanner lens |
| 3 | Quick-release dovetail mount - or mount the laser scanner to the UAV in the DJI SkyPort payload slot with protective cover - optional |
| 4 | Spare antenna cable with connectors |
| 5 | GNSS antenna mount with cable and mounting screws |
| 6 | External GNSS antenna |
| 7 | MicroSD card at least 32 GB |
| 8 | External USB Type-C flash drive not less than 32 GB |
| 9 | OTG USB Type-C to USB Type-A adapter |
| 10 | Cloth for wiping the lens |
| 11 | Power supply 220V (USB Type-C) for power supply (PD 12-15-20V) |
| 12 | USB-Type-C to LEMO 6-PIN power cable for power supply power supply |
| 13 | M3x8 screws for attaching TOPODRONE LiDAR to the mount with DJI SkyPort connector |
| 14 | Protective carrying case with a lodgement for transportation |
|  |
| Noises from false reflections of the TOPODRONE LiDAR, ALS was conducted during rain. |
|  |  |
| DJI M200 and TOPODRONE LIDAR icing | DJI M200 blades and icing |
The manufacturer is not responsible for equipment malfunction or for obtaining poor or inaccurate data when used outside the recommended operating conditions.
# Technical specifications| 200+ | 100+ | 100 | |
| Sensor Type: | XT32M2X | XT32 | XT16 |
| Laser Sensor Drive Type: | Mechanical circular rotation | Mechanical circular rotation | Mechanical circular rotation |
| Max. range of beam (m): | 300 | 120 | 120 |
| XYZ accuracy (cm): | 3-5 | 3-5 | 3-5 |
| Max. sensor rpm: | 1200 | 1200 | 1200 |
| Recommended rsensor pm: | 600 | 600 | 600 |
| Number of laser beams (pcs): | 32 | 32 | 16 |
| MLS all-round viewing angle: | 0-360 | 0-360 | 0-360 |
| ALS Angle of circular view: | 217-323 | 217-323 | 217-323 |
| Vertical viewing angle: | 40.3(+19.5…-20.8) | 31(+15…-16) | 30(+15…-15) |
| Horizontal resolution, °: | 0.09 | 0.09 | 0.09 |
| Vertical resolution, °: | 1.3 | 1 | 2 |
| Weight (g): | 800 | 1000 | 1000 |
| Dimensions (WxDxH) (mm): | 118х155х105 | 120х155х105 | 120х155х105 |
| Laser operating wavelength (nm): | 905nm | 905nm | 905nm |
| Reflection type: | Triple Return | Dual Return | Dual Return |
| Number of points at single reflection | 640000 | 640000 | 320000 |
| Number of dots for double reflection | 1280000 | 1280000 | 640000 |
| Number of dots at triple reflection | 1920000 | - | - |
| Laser Safety Class: | Class 1 safe for eyes | Class 1 safe for eyes | Class 1 safe for eyes |
| Power consumption (watt.): | 10 | 10 | 9 |
| Operating voltage, V | 12–28 | 12–28 | 12–28 |
| Connectors for power supply: | LEMO 4 PIN, USB-Type-C | LEMO 4 PIN, USB-Type-C | LEMO 4 PIN, USB-Type-C |
| Antenna connector: | LEMO FFA.00 | LEMO FFA.00 | LEMO FFA.00 |
| Min. number of visible satellites to pass initialisation: | 8 | 8 | 8 |
| Max. ALS wind strength (m/s): | 10 | 10 | 10 |
| Operating temperature range: | -20°C ... +60°C | -20°C ... +60°C | -20°C ... +60°C |
| Storage temperature range: | -40°C ... +60°C | -40°C ... +60°C | -40°C ... +60°C |
| Operating humidity range: | 20% ... 95% | 20% ... 95% | 20% ... 95% |
| IMU operating frequency (Hz): | 200 | 200 | 200 |
| Recommended operating altitude (m): | 70-150 | 90-110 | 90-110 |
| Supported GNSS systems and frequencies: | GPS: L1C/A, L2C; GLONASS: L1OF, L2OF; GALILEO: E1B/C, E5b; BEIDOU: B1I, B2I | GPS: L1C/A, L2C; GLONASS: L1OF, L2OF; GALILEO: E1B/C, E5b; BEIDOU: B1I, B2I | GPS: L1C/A, L2C; GLONASS: L1OF, L2OF; GALILEO: E1B/C, E5b; BEIDOU: B1I, B2I |
| Number of GNSS receiver channels: | 184 | 184 | 184 |
| Raw measurement recording frequency, Hertz: | 10 | 10 | 10 |
| Yaw axis accuracy (°, 1σ): | 0.08 | 0.08 | 0.08 |
| Pitch axis accuracy (°, 1σ): | 0.03 | 0.03 | 0.03 |
| Roll axis accuracy (°, 1σ): | 0.03 | 0.03 | 0.03 |
| Memory cards supported | MicroSD | MicroSD | MicroSD |
| Memory card file system | exFAT | exFAT | exFAT |
| Internal memory capacity (Gb): | 256 | 256 | 256 |
| External media connection type: | USB Type-C | USB Type-C | USB Type-C |
| Country of manufacture: | Switzerland | Switzerland | Switzerland |
| Possible installation options | Aircraft, car, backpack | Aircraft, car, backpack | Aircraft, car, backpack |
| 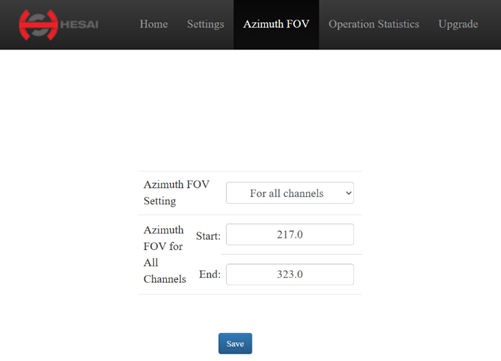 Setting the Laser Scanning Sensor Parameters for the ALS | 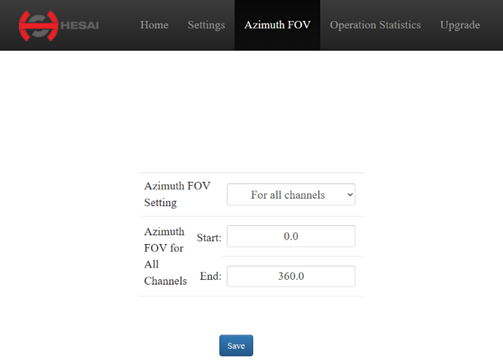 Setting the Laser Scanning Sensor Parameters for the MLS |
|  Setting the Laser Scanning Sensor Parameters for the ALS |  Setting the Laser Scanning Sensor Parameters for the MLS |
The procedure for connecting the TOPODRONE LiDAR to the Internet (steps 1-8) can also be used by TOPODRONE Technical Support for remote diagnostics.
The TOPODRONE LiDAR settings are saved until the next time you change them. It is strongly recommended to memorize or make a note of the currently set laser sensor angles. In case of incorrect initial settings, e.g. setting the ALS at the time of performing an MLS, the data from the excluded angles is not saved and cannot be retrieved in any way. On the contrary, if the TOPODRONE LiDAR is set to 360 degrees when performing ALS, the data will be more than 3 times redundant.
# TOPODRONE LiDAR to backpack installation **To install the TOPODRONE LiDAR on the backpack, you need the following components included in the package:** [](https://knowledge.topodrone.ru/uploads/images/gallery/2024-10/L3a1.jpg)| 1\. TOPODRONE LiDAR - 1 pc. 2\. TOPODRONE Backpack - 1 pc. 3\. Backpack LiDAR mount with antenna cable - 1 pc. 4\. LiDAR mount spacer - 1 pc. 5\. GNSS Antenna - 1 pc. 6\. Power Bank - 1 pc. 7\. LEMO 6 PIN - USB Type-C power cable - 1 pc. 8\. Pole (30 cm) - 1 pc. | 9. Screw M3x8 - 4 pc. 10. Screw М4х8 - 1 pc. 11. Screw М5х8 - 1 pc. 12. Screw 5/8" - 11 UNC x 3/4" - 1 pc. 13. Hex 2.5 screwdriver - 1 pc. 14. Hex 3 screwdriver - 1 pc. 15. Hex 4 screwdriver - 1 pc. |
**It is strongly recommended to use a protective soft cover for the TOPODRONE LiDAR to avoid the risk of damaging the laser scanning lens!** **For better clarity, in the photos shown, the TOPODRONE LiDAR is shown without the case.**
**To install the TOPODRONE LiDAR on the backpack, follow the steps below:** 1\. Place the TOPODRONE LiDAR **(1)** on a flat surface as shown in the photo. [](https://knowledge.topodrone.ru/uploads/images/gallery/2024-10/143a9353.JPG) 2\. Using a Hex M2.5 screwdriver **(13)** and M3x8 screws **(9)**, install the laser scanner mount adapter **(4)** as shown in the photo.[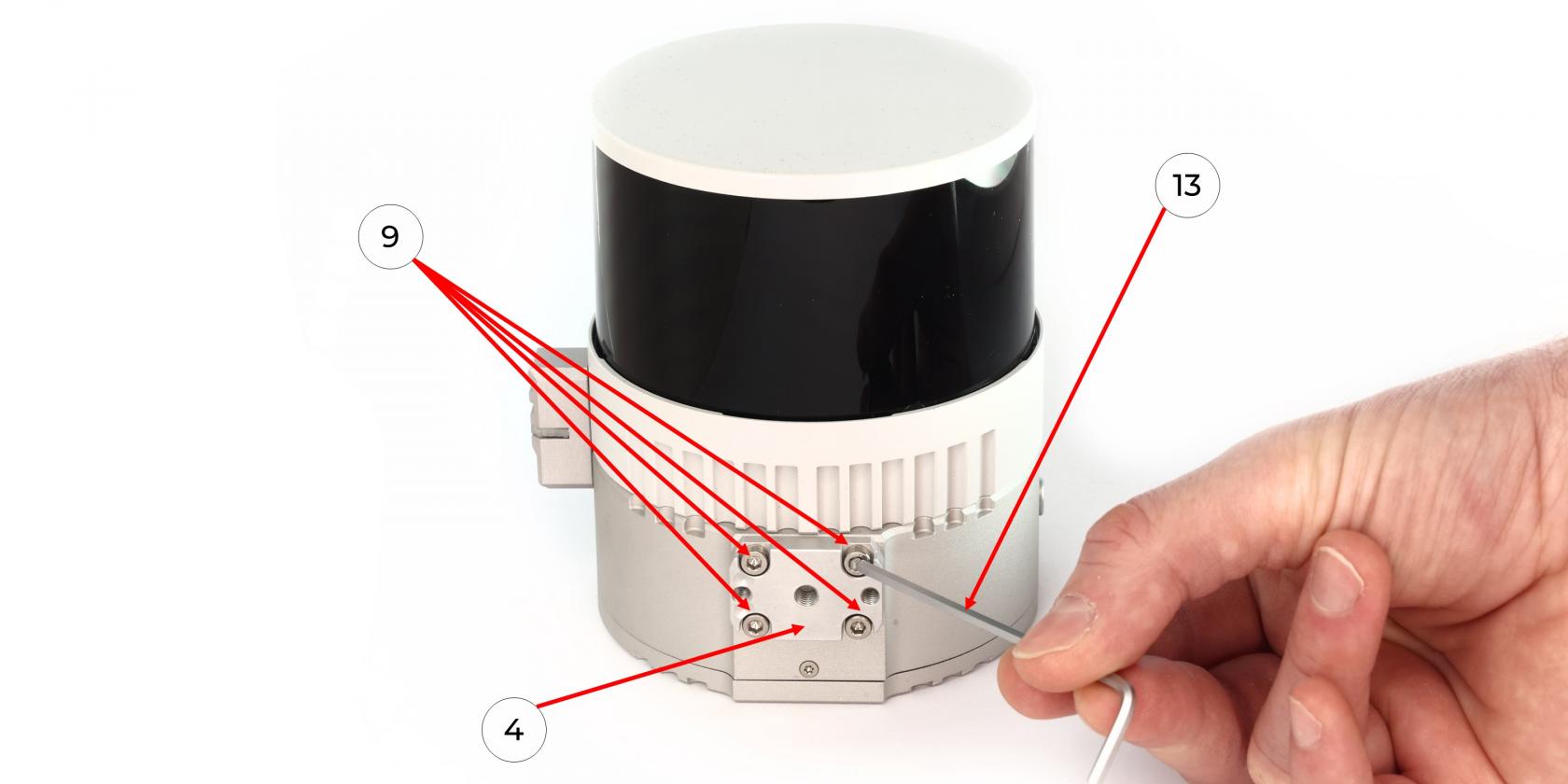](https://knowledge.topodrone.ru/uploads/images/gallery/2024-10/3.jpg)3. Manually screw the GNSS antenna **(5)** onto the Backpack Mount with antenna cable **(3)** using a 5/8“ - 11 UNC x 3/4” screw **(12)** as shown in the photo. [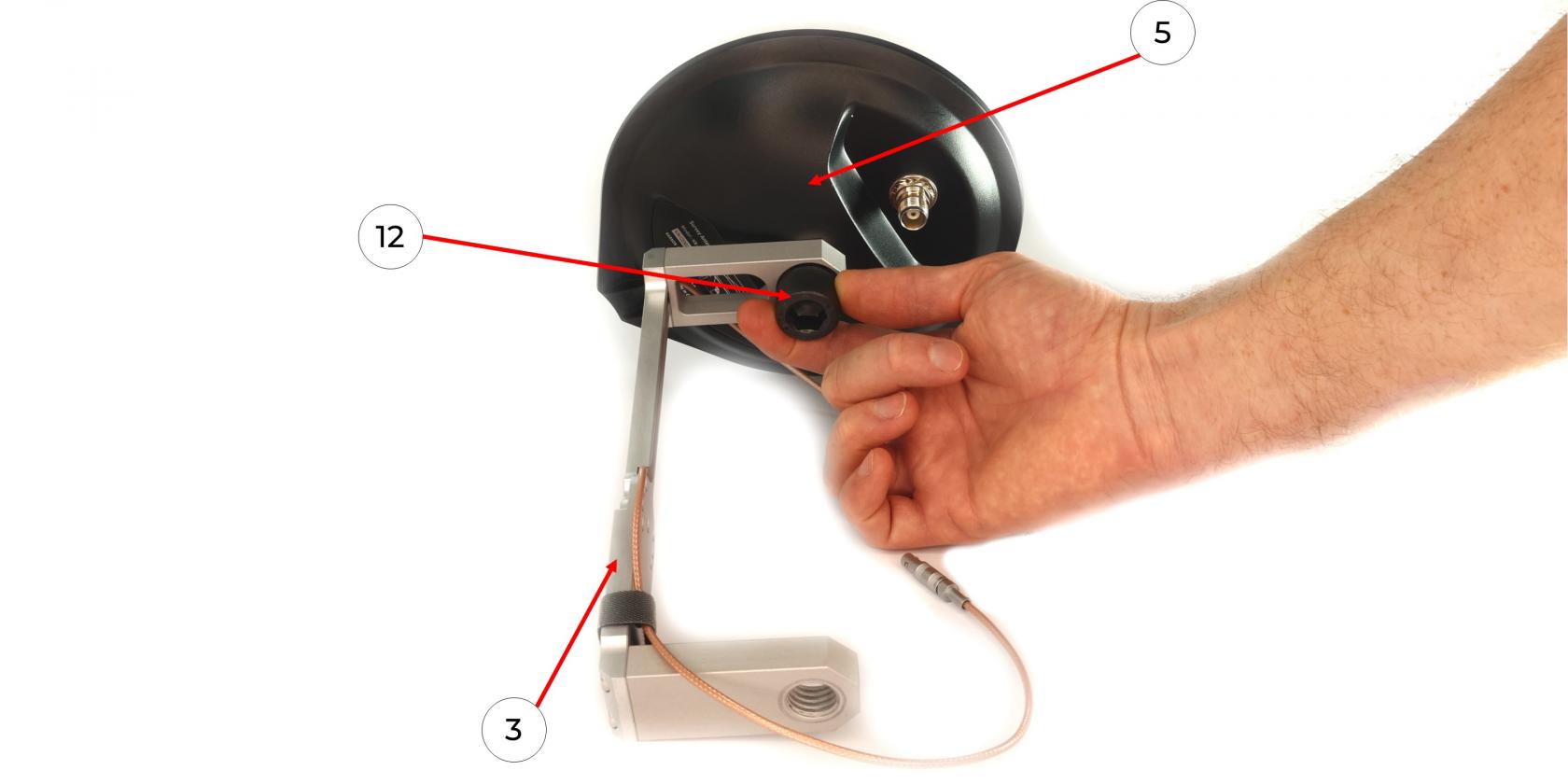](https://knowledge.topodrone.ru/uploads/images/gallery/2024-10/4.jpg) 4\. Connect the antenna cable **(3)** to the GNSS antenna **(5)**, avoiding bends as shown in the photo. [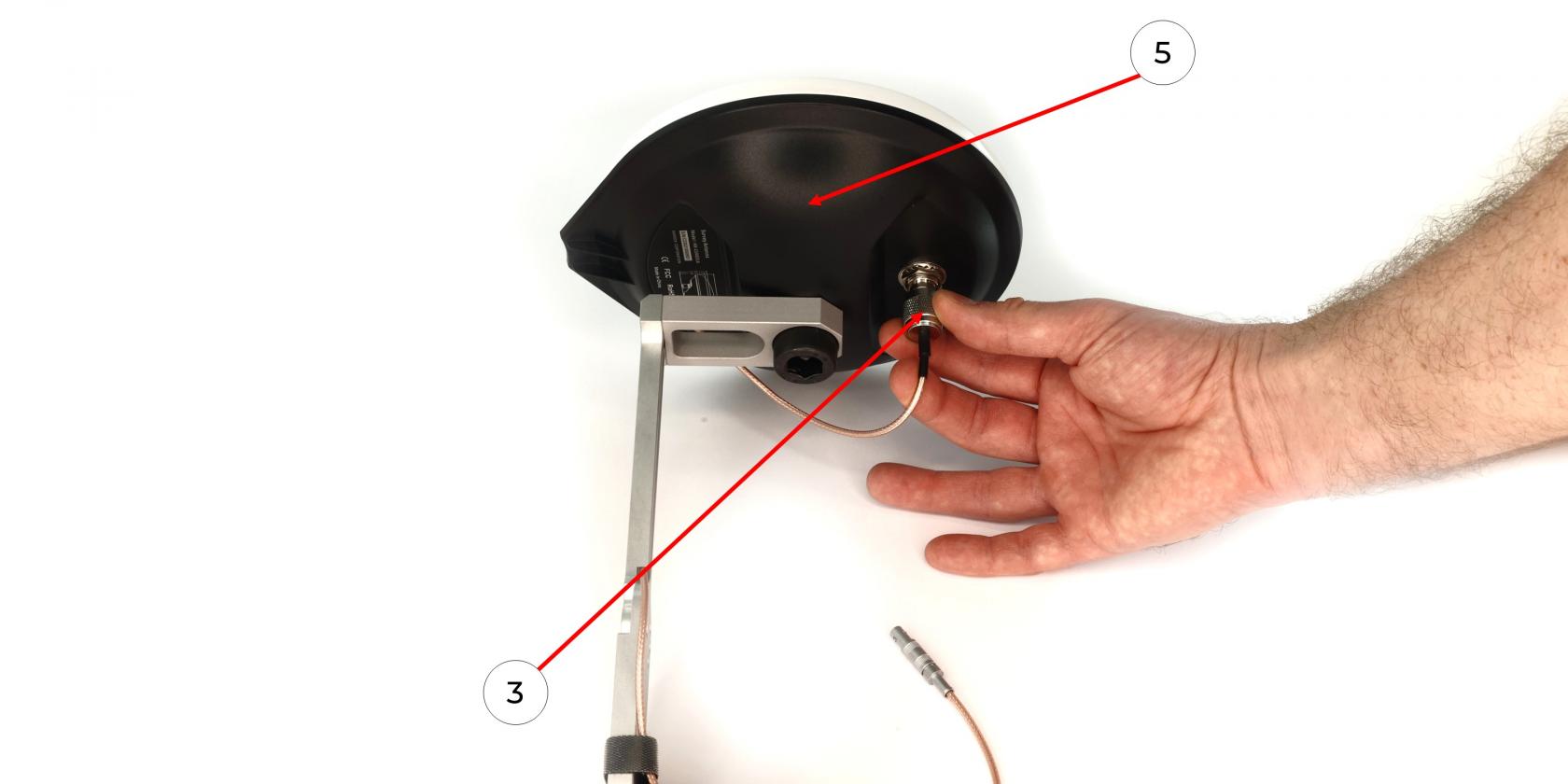](https://knowledge.topodrone.ru/uploads/images/gallery/2024-10/5.jpg) 5\. Using a Hex 4 screwdriver **(15)** and an M5x8 screw **(11)**, mount the TOPODRONE LiDAR to the fastening part of the backpack **(3)** without pinching the antenna cable. [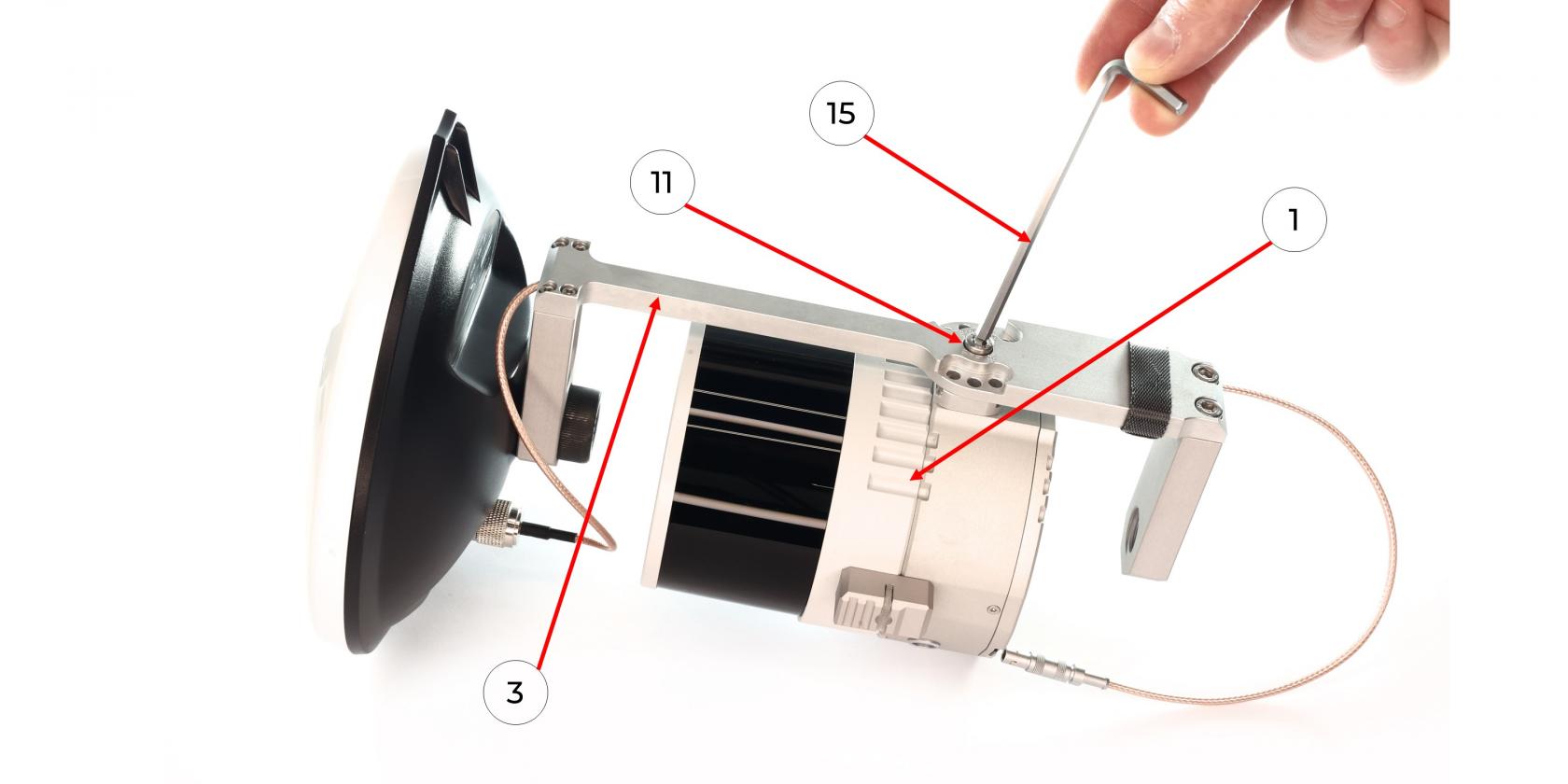](https://knowledge.topodrone.ru/uploads/images/gallery/2024-10/V8Y6.jpg) 6\. Position the TOPODRONE LiDAR on the mount at the required angle and fix it with the M4x8 screw **(10)** using a Hex 3 screwdriver **(14)**. [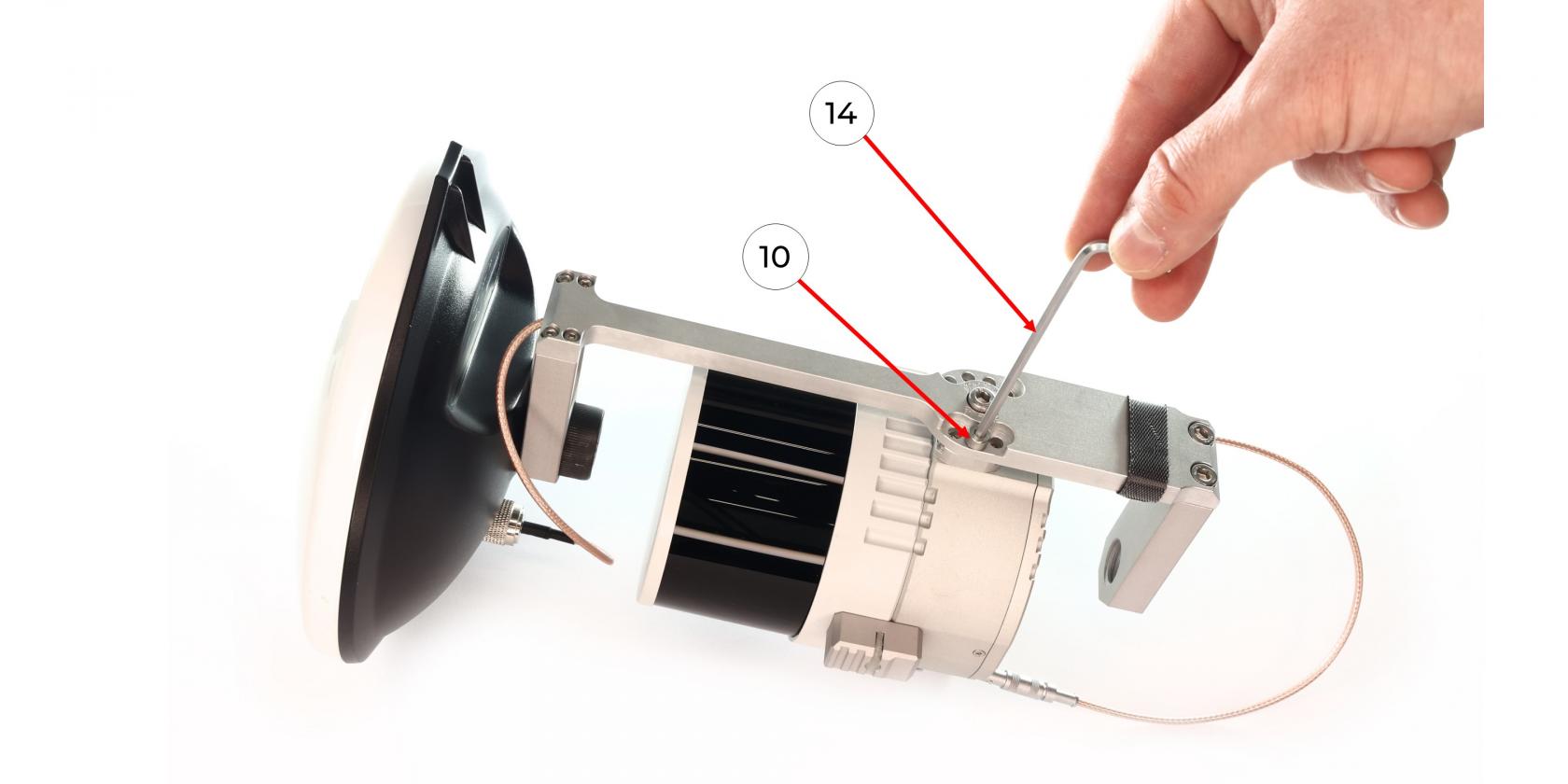](https://knowledge.topodrone.ru/uploads/images/gallery/2024-10/TLG7.jpg) 7\. Connect the antenna connector of the LEMO mount **(3)** to the TOPODRONE LiDAR **(1)** [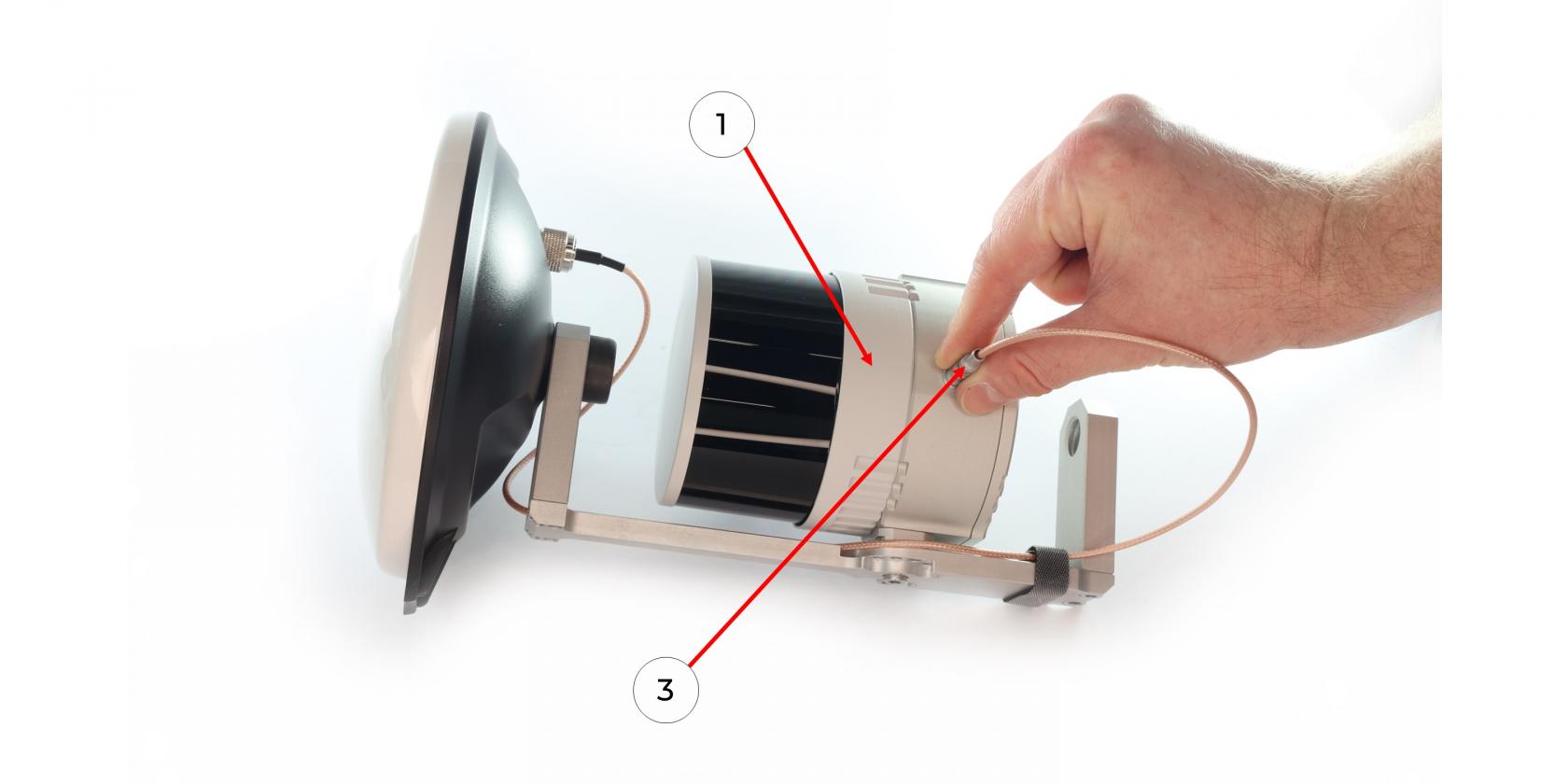](https://knowledge.topodrone.ru/uploads/images/gallery/2024-10/12.jpg) 8\. Screw the pole **(8)** to the backpack attachment **(3)**. [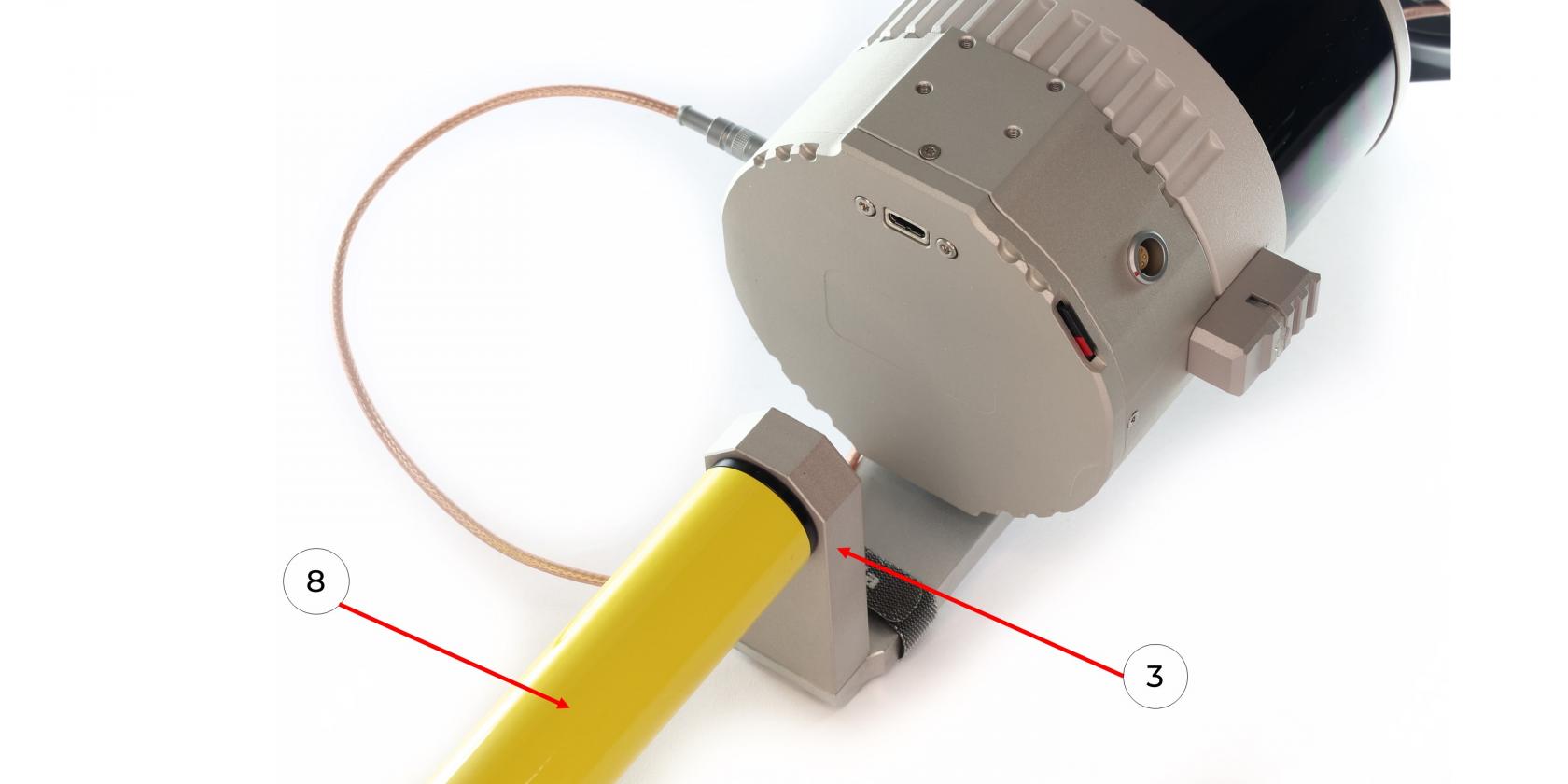](https://knowledge.topodrone.ru/uploads/images/gallery/2024-10/8.jpg) 9\. Screw the pole **(8)** to the backpack **(2)** as shown in the photo. The LED of the TOPODRONE LiDAR should be positioned backwards. [](https://knowledge.topodrone.ru/uploads/images/gallery/2024-10/9.jpg) 10\. Connect the LEMO 6 PIN to USB Type-C power cable **(7)** to the TOPODRONE LiDAR **(1)**. [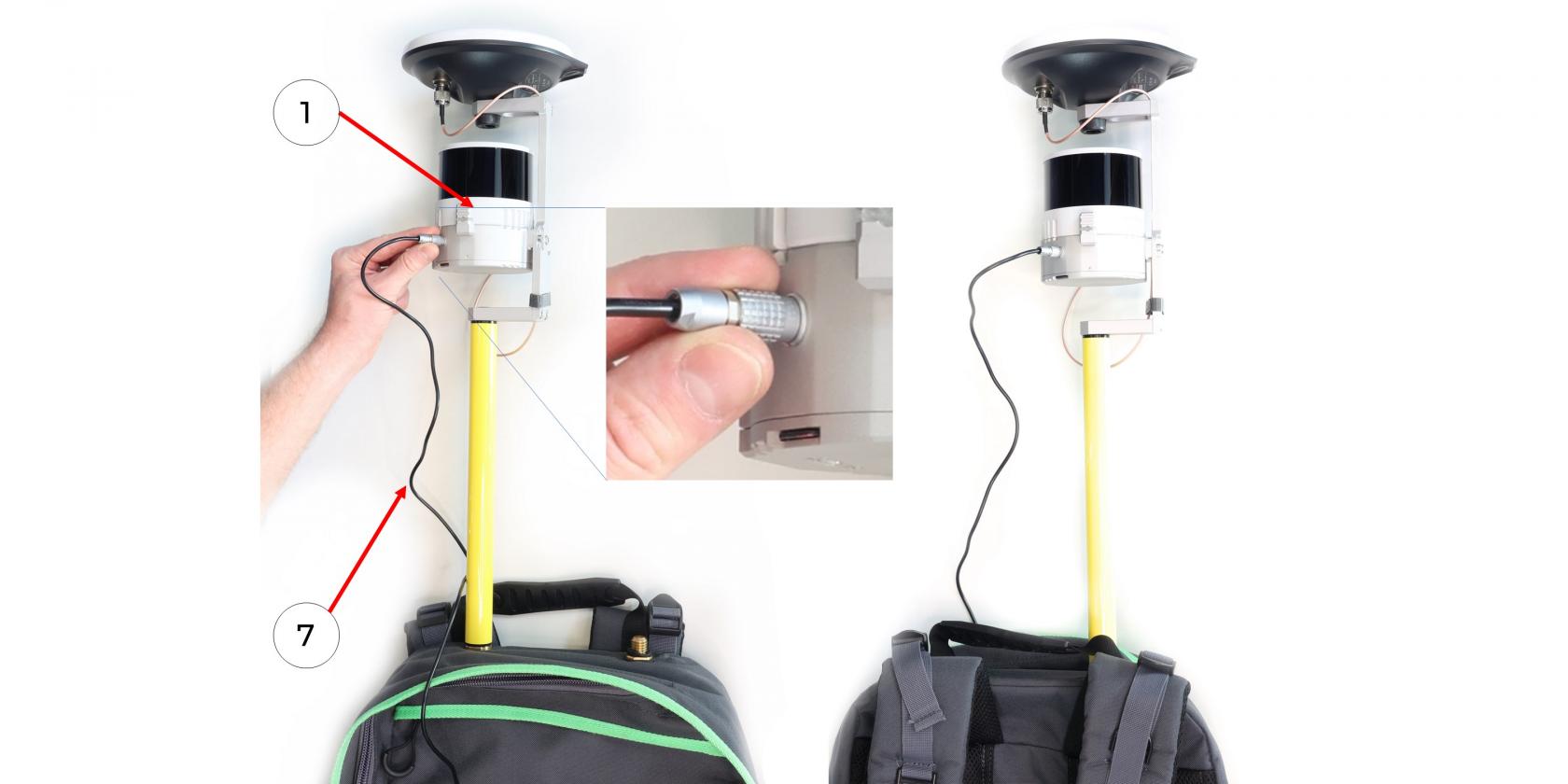](https://knowledge.topodrone.ru/uploads/images/gallery/2024-10/10.jpg) 11\. Connect the LEMO 6 PIN to USB Type-C power cable **(7)** to the Power Bank **(6)** and apply power. [](https://knowledge.topodrone.ru/uploads/images/gallery/2024-10/11.jpg) 12\. Put the Power Bank **(6)** into the backpack pocket **(2)** and wait for the[ TOPODRONE LiDAR **(1)** to turn on and initialize](https://knowledge.topodrone.com/books/topodrone-100100200/page/switching-on-and-initializing-the-topodrone-lidar). Next - put on the backpack as shown in the photo and start the MLS.| [](https://knowledge.topodrone.ru/uploads/images/gallery/2024-10/kh1143a9405.JPG) | [](https://knowledge.topodrone.ru/uploads/images/gallery/2024-10/143a9406.JPG) |
| 1\. TOPODRONE LiDAR - 1 pc. 2\. Mobile mount base - 1 pc.. 3\. Mobile mount arm - 3 pc. 4\. Mobile mount suction cup - 3 pc. 5\. GNSS antenna - 1 pc. 6\. Pole (30 cm) - 1 pc. 7\. M3x10 screw - 10 pc. 8\. М5х10 screw - 2 pc. | 9. 5/8" - 11 UNC x 3/4" screw - 1 pc. 10. Mobile mount spacer - 2 pc. 11. Hex 2.5 screwdriver - 1 pc. 12. Hex 4 screwdriver - 1 pc. 13. Antenna cable - 1 pc. 14. LEMO 6 PIN - USB Type-C power cable - 1 pc. 15. Power Bank - 1 pc. |
**It is strongly recommended to use a TOPODRONE LiDAR protective soft cover for to avoid the risk of damaging the laser scanning lens! For better clarity, in the photos shown, the TOPODRONE TOPODRONE LiDAR is shown without the case.**
1\. Install the two mobile mount spacers **(10)** on the TOPODRONE LiDAR **(1)** with 8 M3x10 **(7)** screws using a Hex 2.5 **(11)** screwdriver as shown in the photo:| [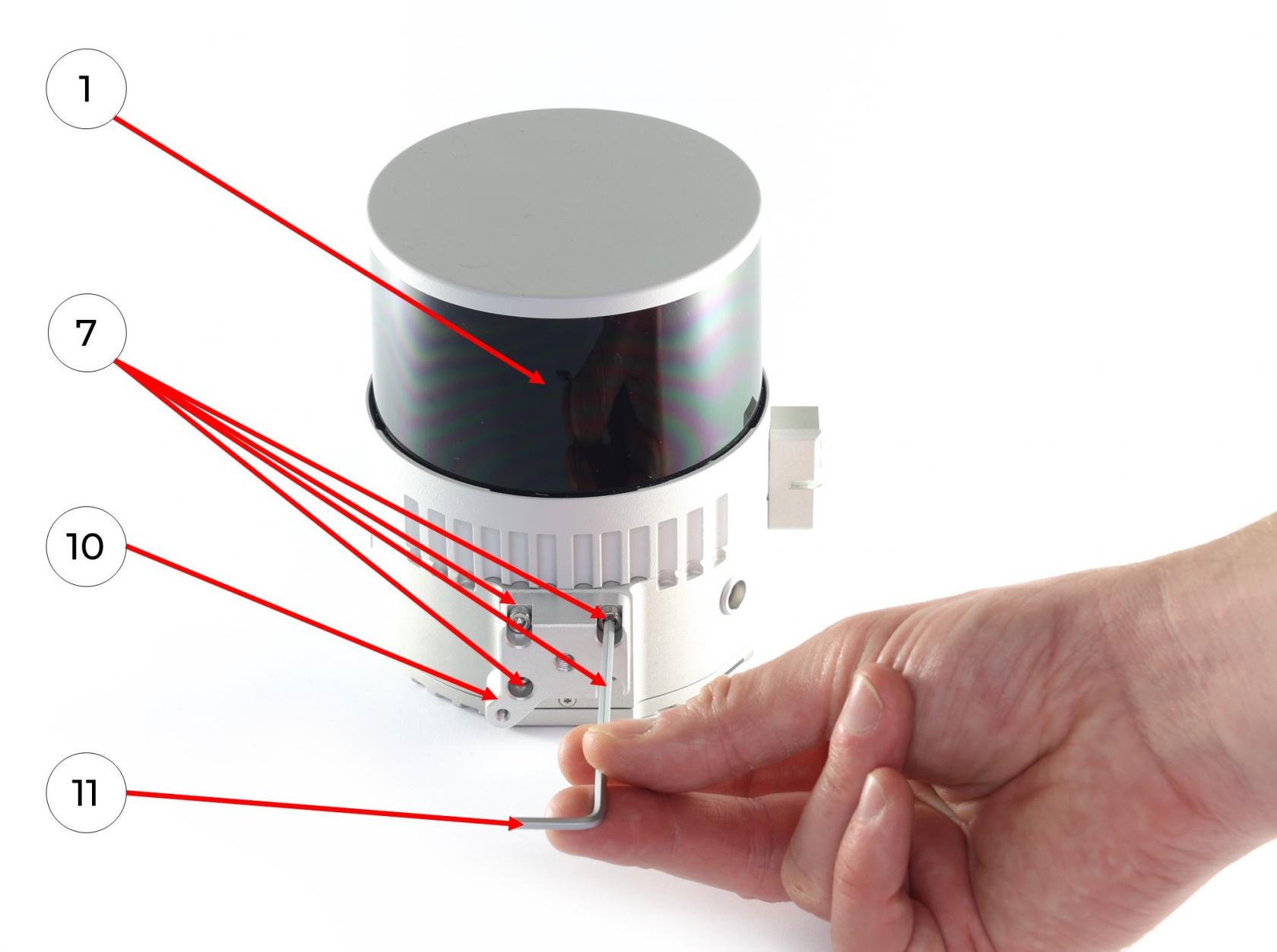](https://knowledge.topodrone.ru/uploads/images/gallery/2024-10/UCE1.jpg) | [](https://knowledge.topodrone.ru/uploads/images/gallery/2024-10/2.jpg) |
Hold the TOPODRONE LiDAR **(1)** so that it does not fall and proceed to step 3. Use the cover to protect the lens! It is especially important in this step!
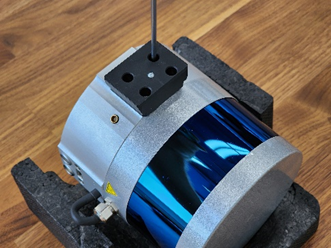
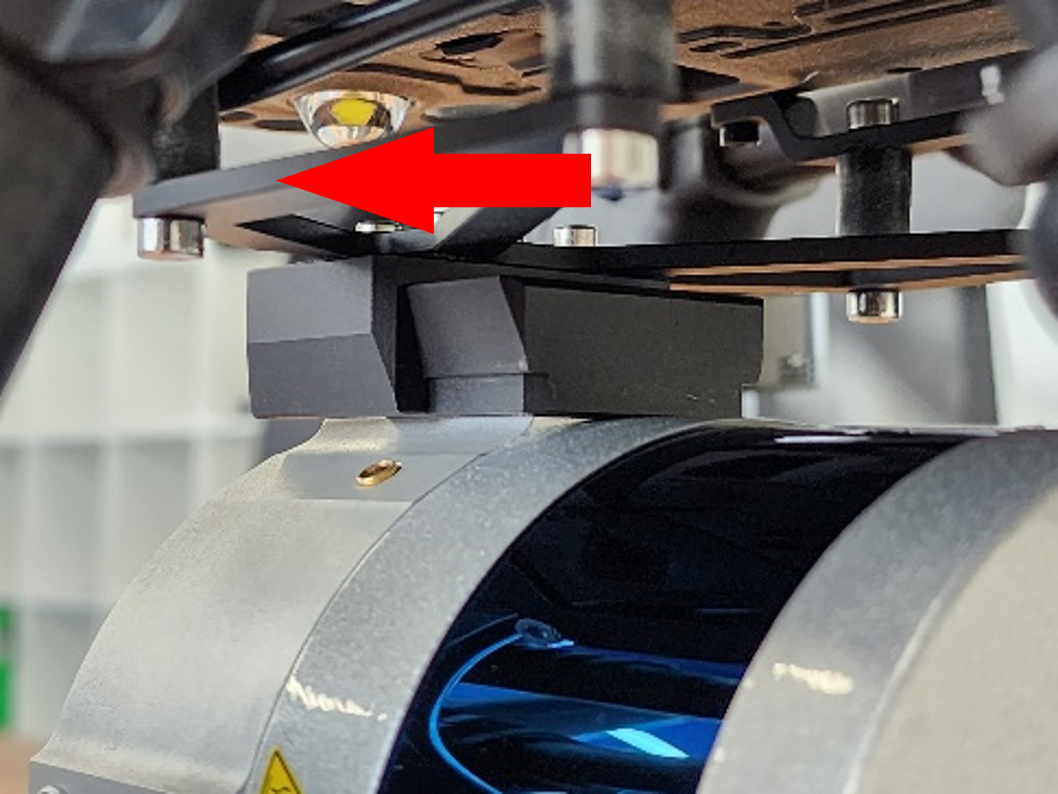
[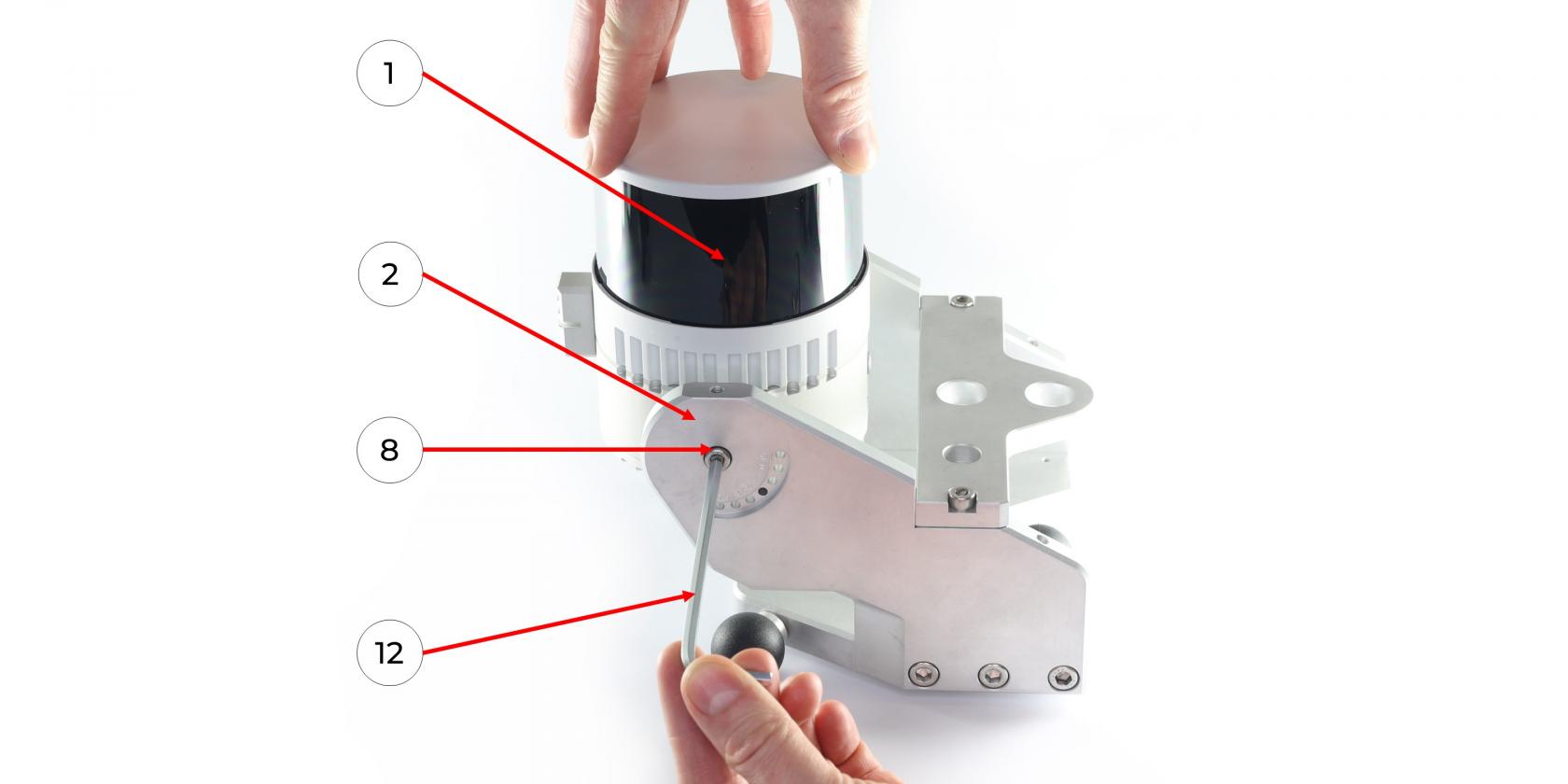](https://knowledge.topodrone.ru/uploads/images/gallery/2024-10/oNI3.jpg)3. Set the TOPODRONE LiDAR **(1)** at the required angle on the main part of the mobile mount **(2)** and fix the position with two M3x10 screws **(7)** using a Hex 2.5 screwdriver **(11)**. [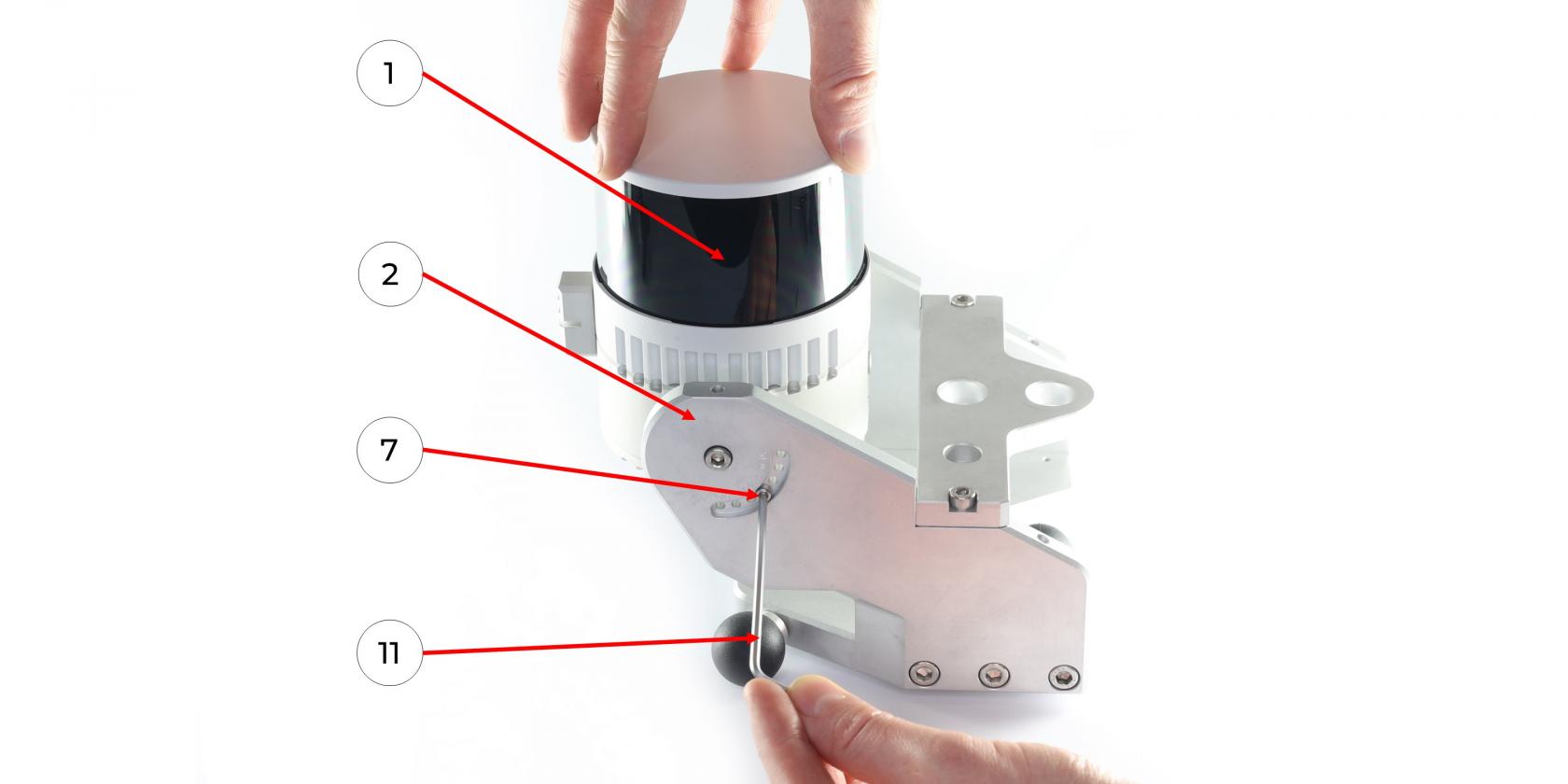](https://knowledge.topodrone.ru/uploads/images/gallery/2024-10/p9F4.jpg) 4\. Connect the mobile mount arm **(3)** to the suction cup swivel mechanism **(4)**, repeat with all parts. [](https://knowledge.topodrone.ru/uploads/images/gallery/2024-10/UdT5.jpg) 5\. Connect the mobile mount arm **(3)** with the other side to the hinge mechanism of the mobile mount base **(2)**. If necessary, manually loosen or tighten the thumbscrew. Once the hinge mechanisms are in alignment, manually tighten the thumbscrew. Repeat with all parts. [](https://knowledge.topodrone.com/uploads/images/gallery/2024-10/6.jpg) 6\. Install the pole **(6)** to the mobile mount base **(1)**. Manually tighten the 5/8" - 11 UNC x 3/4" screw **(9)**. [](https://knowledge.topodrone.com/uploads/images/gallery/2024-10/7.jpg) 7\. Screw the GNSS antenna **(5)** onto the pole **(6)**. [](https://knowledge.topodrone.ru/uploads/images/gallery/2024-10/mzN8.jpg) 8\. Connect the GNSS cable **(13)** to the GNSS antenna **(5)**, taking care not to bend it. [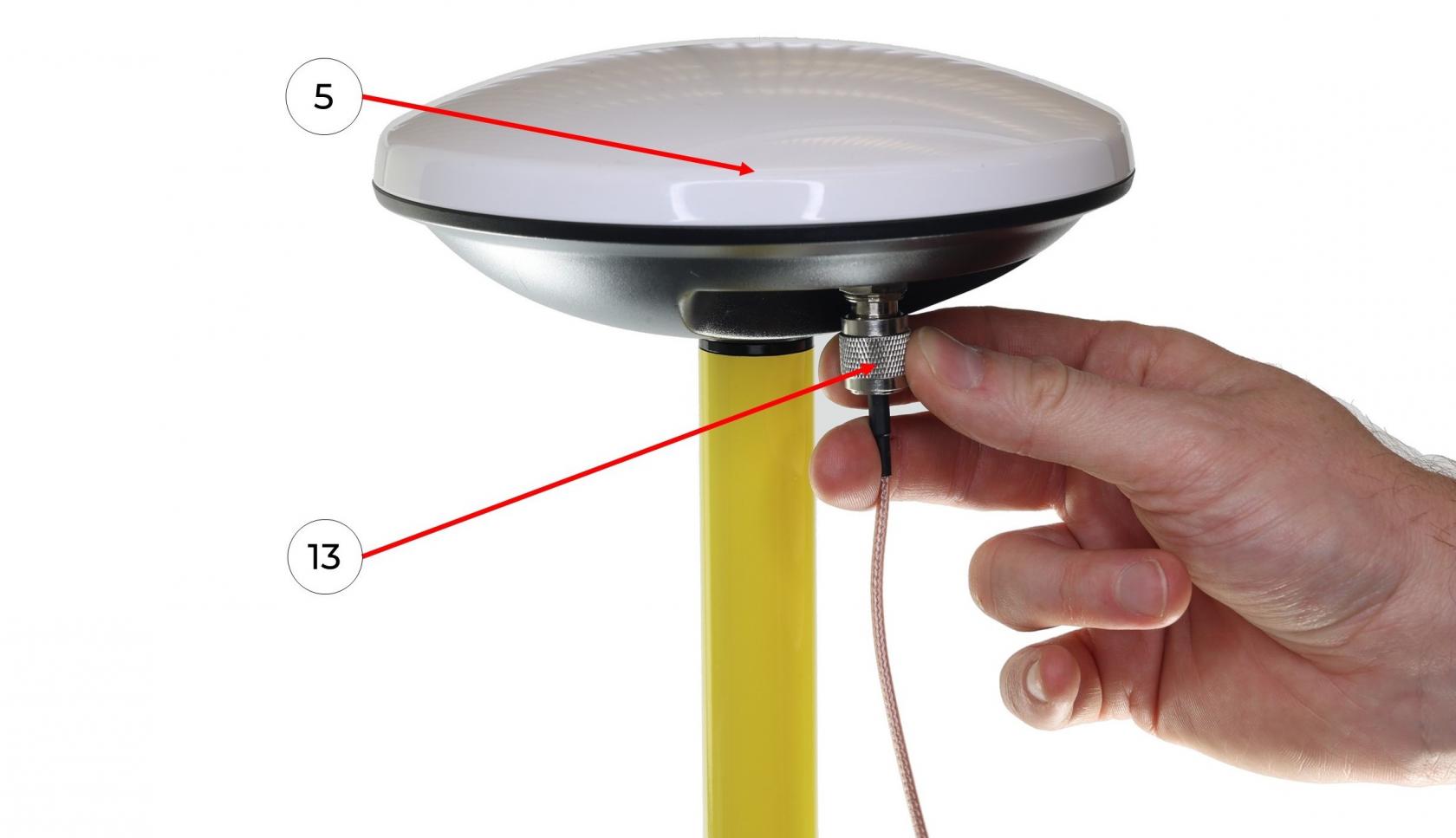](https://knowledge.topodrone.ru/uploads/images/gallery/2024-10/moB9.jpg) 9\. Connect the antenna cable with the LEMO connector **(13)** to the TOPODRONE LiDAR **(1)** it clicks into place. [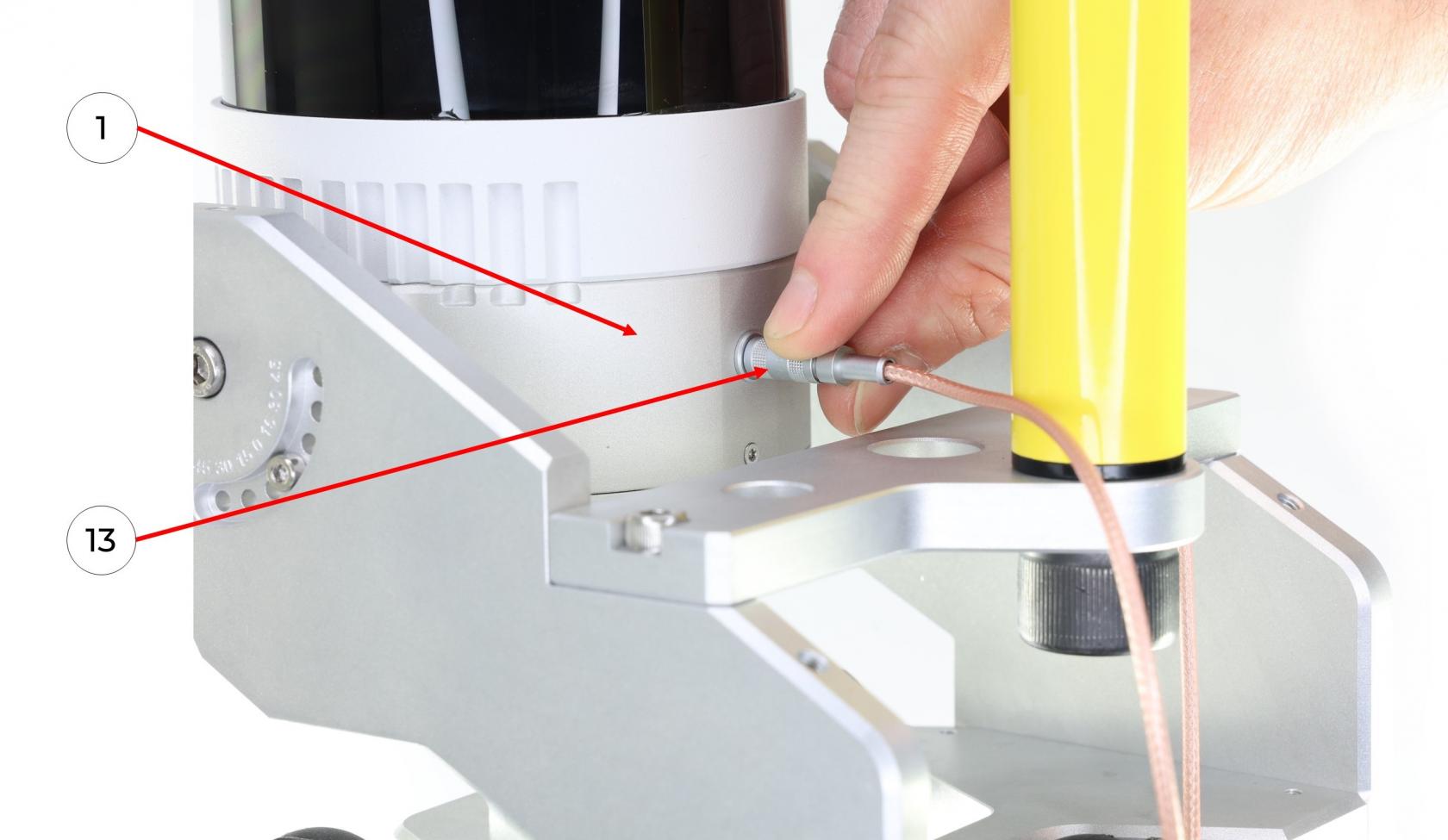](https://knowledge.topodrone.ru/uploads/images/gallery/2024-10/JsF10.jpg) 10\. It is recommended to fix the antenna cable in the area of the pole **(6)** with a GNSS cable velcro **(13)** as shown in the photo. [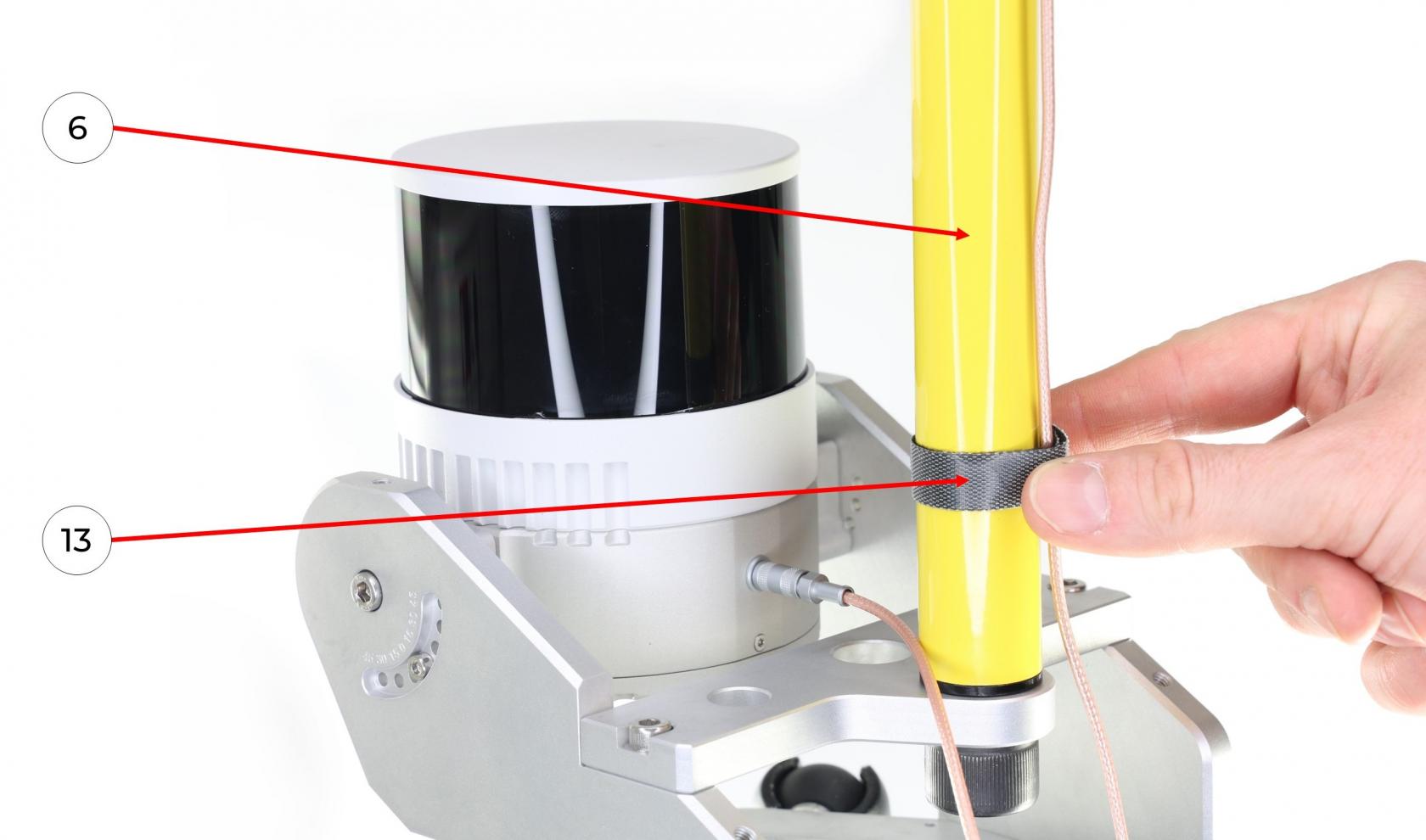](https://knowledge.topodrone.ru/uploads/images/gallery/2024-10/JQq11.jpg) 11\. Clean the surface of a vehicle with wet and dry wipes. Remove the protective caps from the suction cups **(4)**. Install the mobile mount on the car with the suction cups **(4)** using the pump. It is necessary to pump the pump until the pump stops pumping out air and the suction cup is completely glued to the surface. The photos below show the process of pumping the air out of the suction cups without removing the suction cup caps. [](https://knowledge.topodrone.ru/uploads/images/gallery/2024-10/1Ki12.jpg)12. Connect the LEMO 6-Pin connector of power cable **(14)** to the TOPODRONE LiDAR **(1)**, it clicks into place. [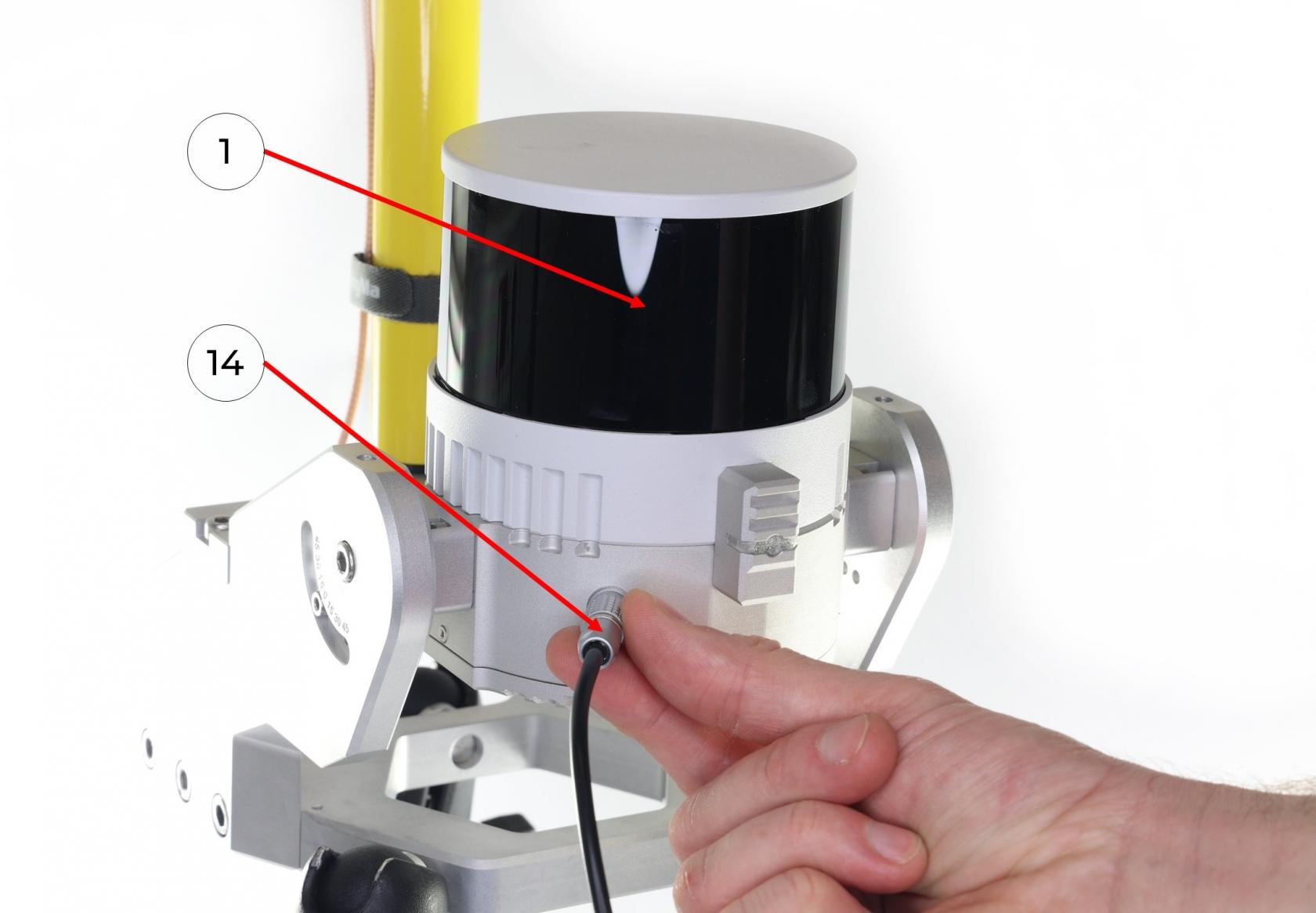](https://knowledge.topodrone.ru/uploads/images/gallery/2024-10/5v813.jpg) 13\. If necessary, use the beam wrenches to adjust the position of the mobile mount on the vehicle so that it is level. The photos below show how to mount the TOPODRONE 100+ laser scanner on the vehicle at 30 and 0 degrees respectively. Note: in the photos below, a non-standard 20 cm long milestone is used, which is different from the one supplied.| [](https://knowledge.topodrone.ru/uploads/images/gallery/2024-10/20231005-131327.jpg) | [](https://knowledge.topodrone.ru/uploads/images/gallery/2024-10/20231005-123204.jpg) |
It is recommended to check the grip of the suction cups every hour, especially at sub-zero temperatures!
Do not install the suction cups on dirty, dusty surfaces, as well as on joints of planes and parts with seams and gaps.
#### **Assembly of the Mobile Scanning Kit** ##### **Additional equipment required for kit assembly:** 1. Insta 360 X4 camera; 2. microSD memory card for the Insta 360 X4 camera (128 GB recommended); 3. Camera mounting bracket for Insta 360 X4; 4. Extended antenna cable (70-80 cm); 5. Mounting screw for securing the GNSS antenna; 6. 1/4-inch hex socket flat head screw for attaching the camera to the bracket. ##### **Camera Mounting Bracket Appearance** The bracket dimensions are 195×73×28 mm. The top hole is designed for the GNSS antenna mounting screw. The bottom hole is for the 1/4-inch hex socket flat head screw used to attach the camera to the bracket. The bracket is then screwed onto the pole. [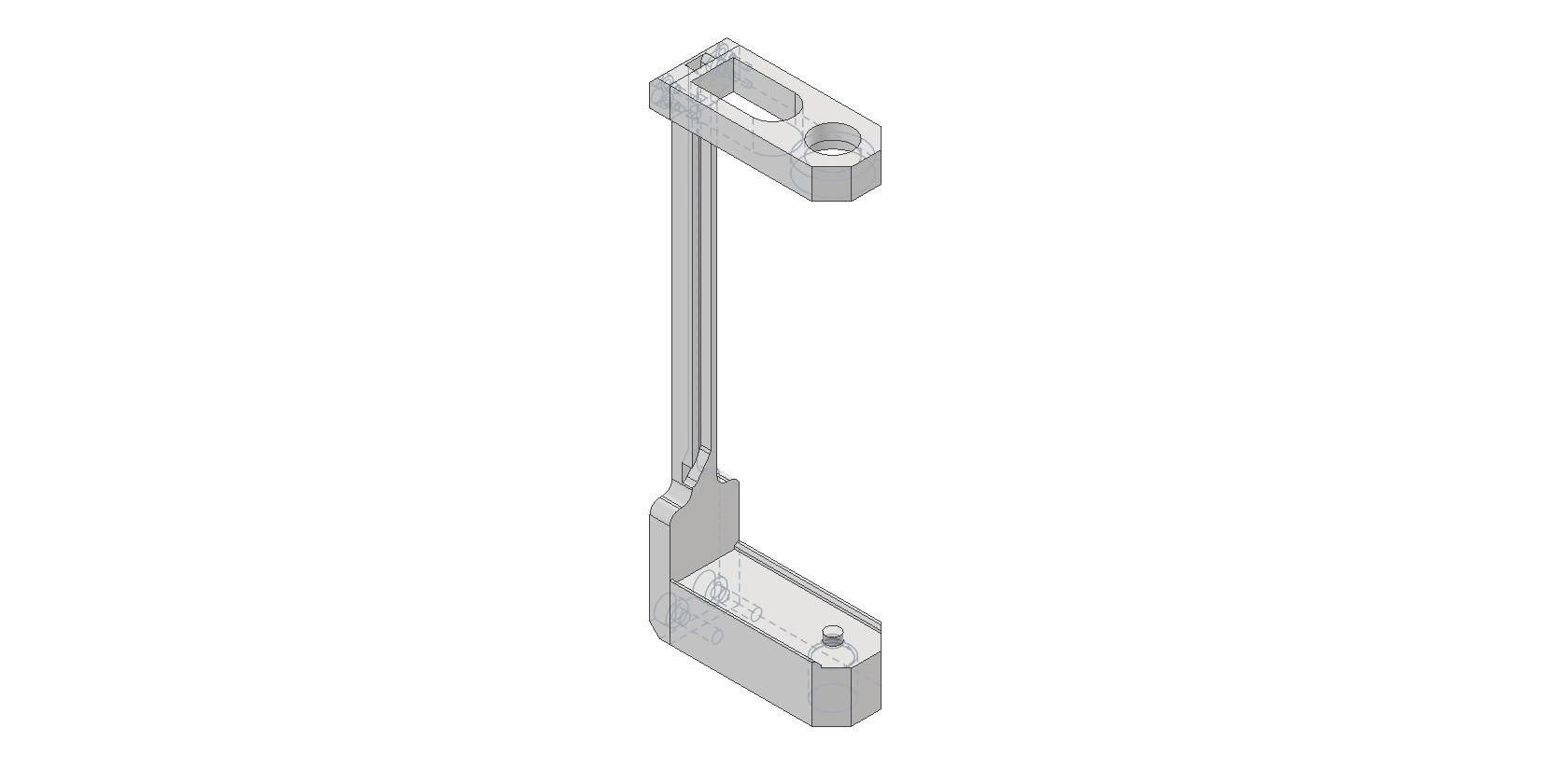](https://knowledge.topodrone.com/uploads/images/gallery/2025-11/kreplenie-insta-360-1.jpg)[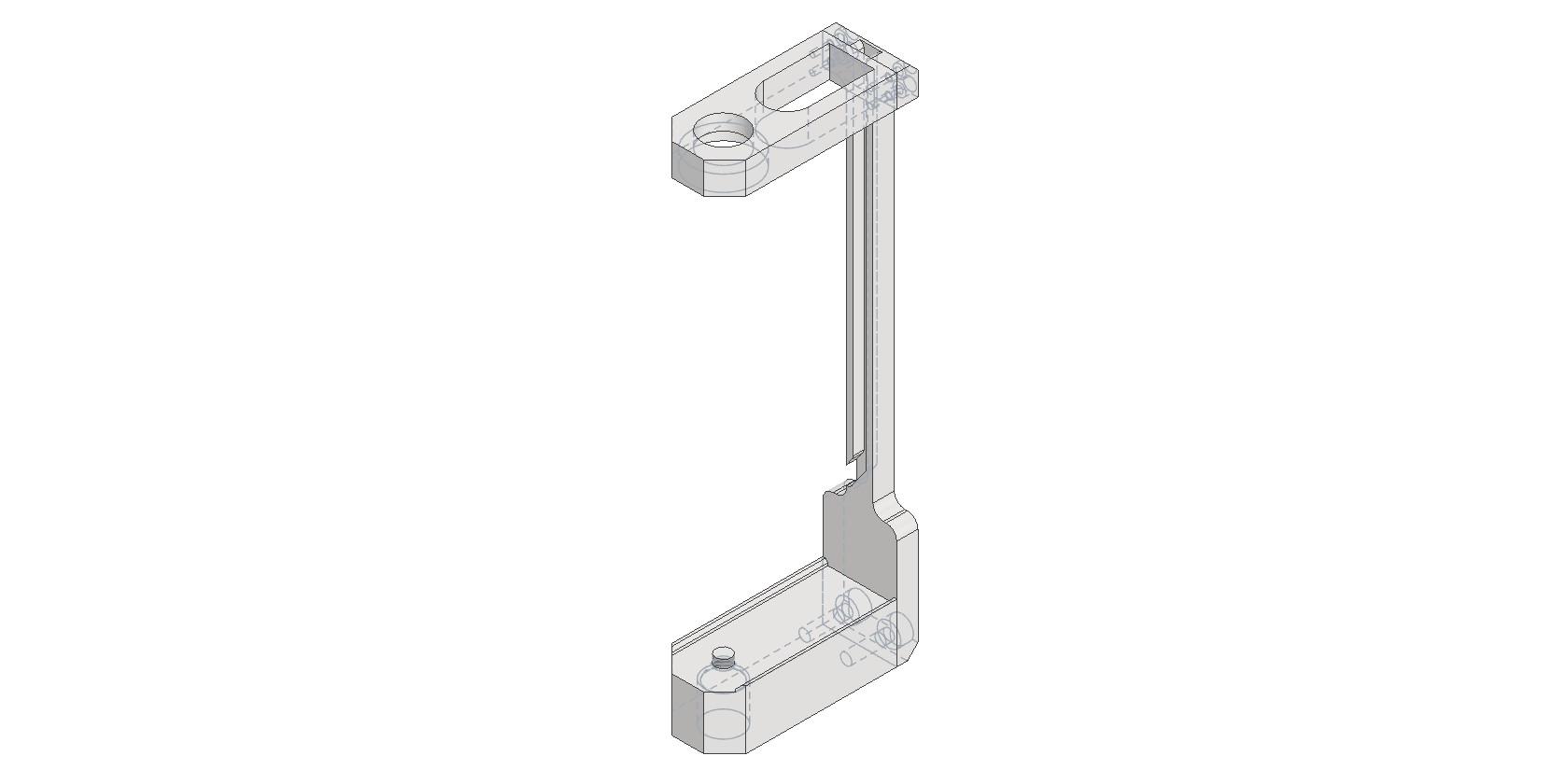](https://knowledge.topodrone.com/uploads/images/gallery/2025-11/kreplenie-insta-360-2.jpg) [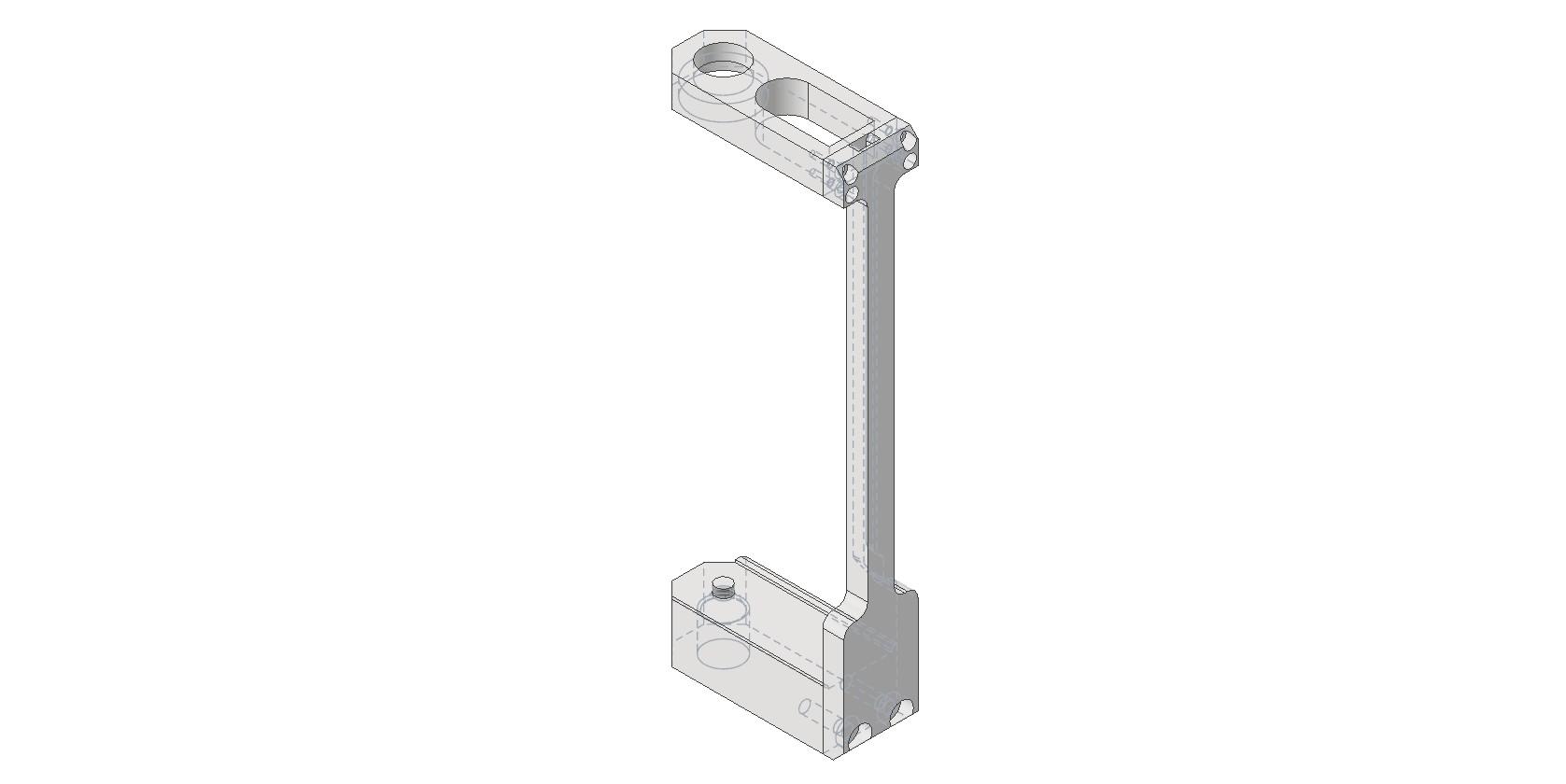](https://knowledge.topodrone.com/uploads/images/gallery/2025-11/kreplenie-insta-360-3.jpg)[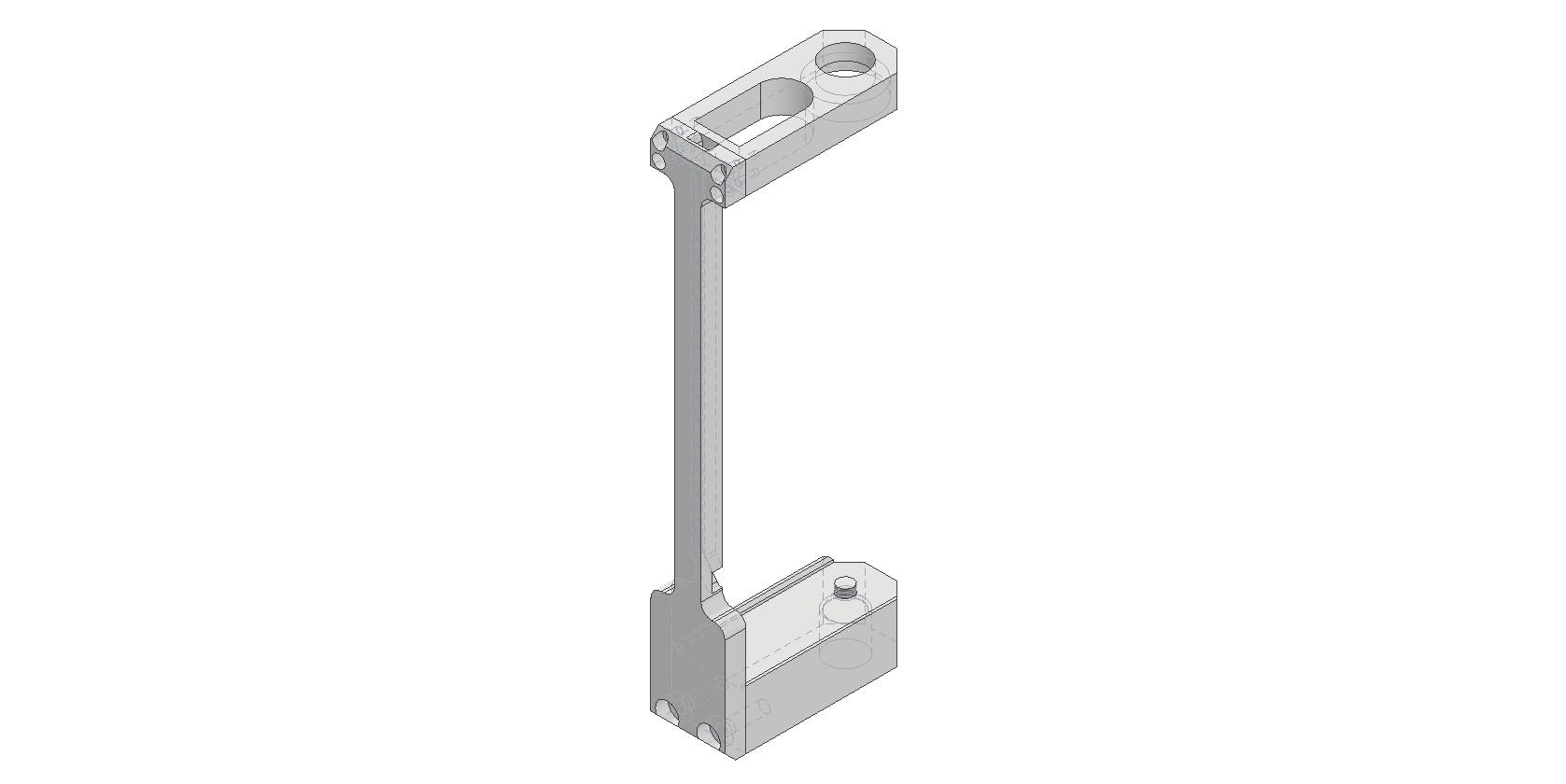](https://knowledge.topodrone.com/uploads/images/gallery/2025-11/kreplenie-insta-360-4.jpg) [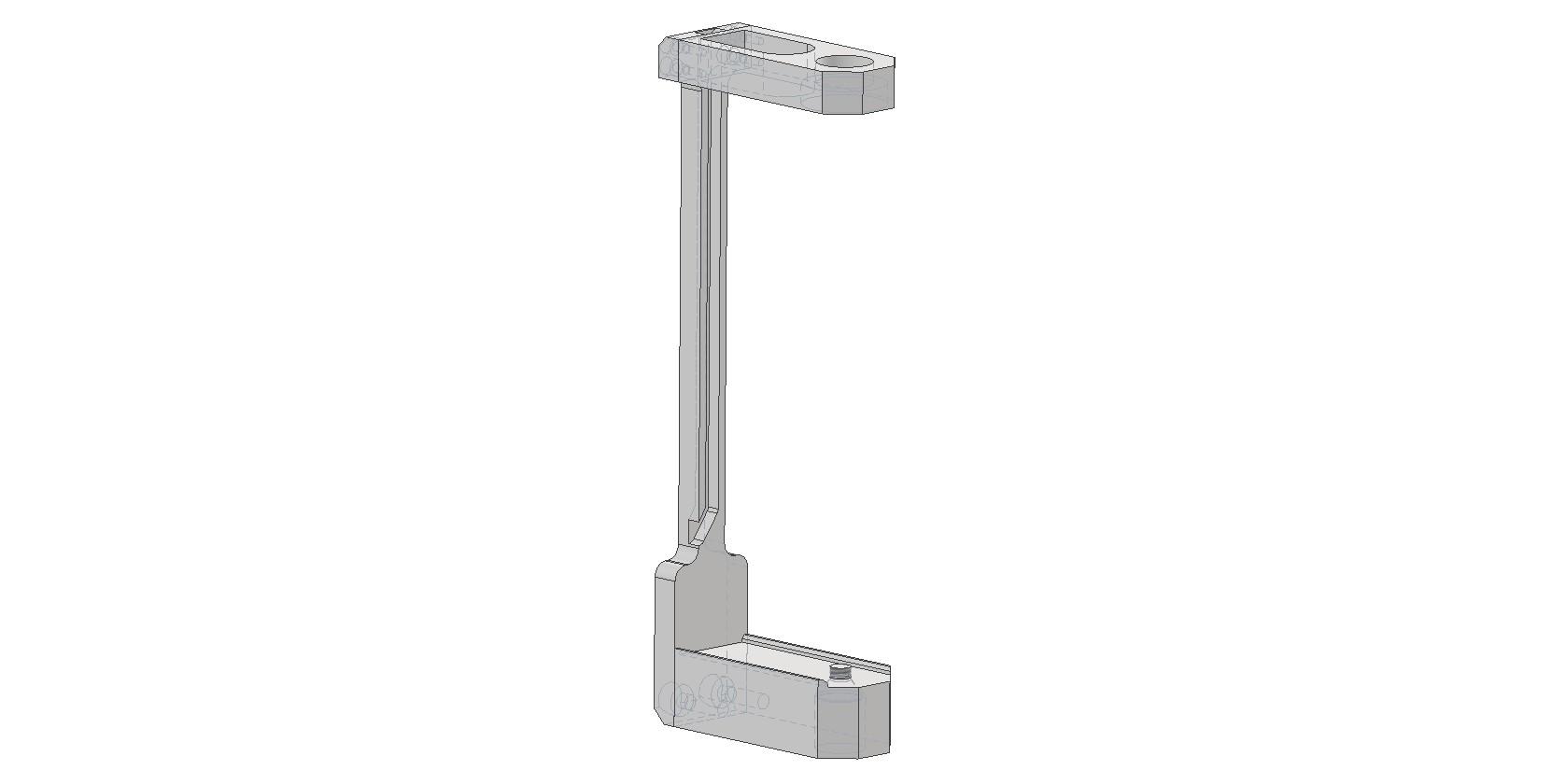](https://knowledge.topodrone.com/uploads/images/gallery/2025-11/kreplenie-insta-360-5.jpg)[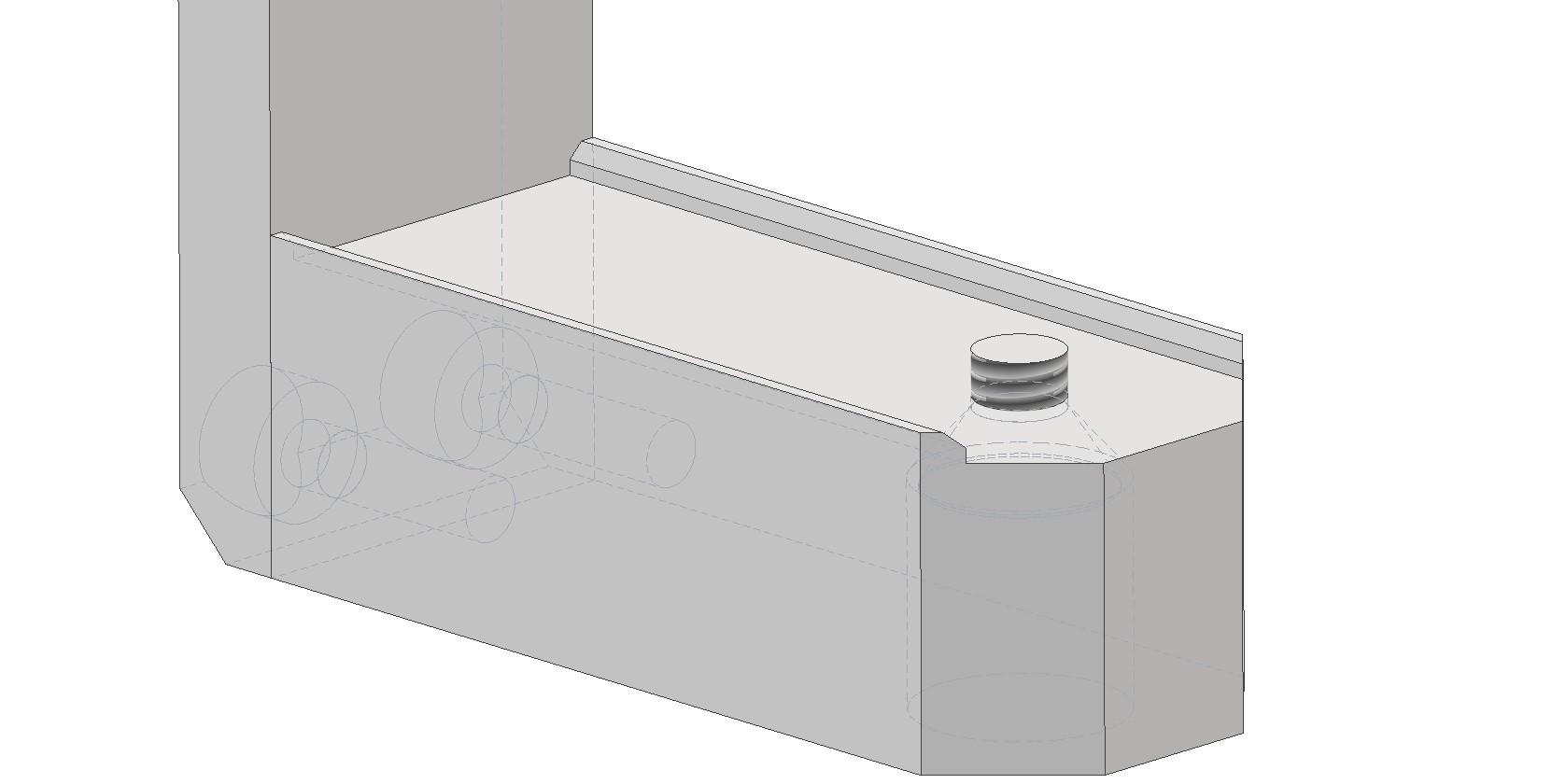](https://knowledge.topodrone.com/uploads/images/gallery/2025-11/kreplenie-insta-360-6.jpg) [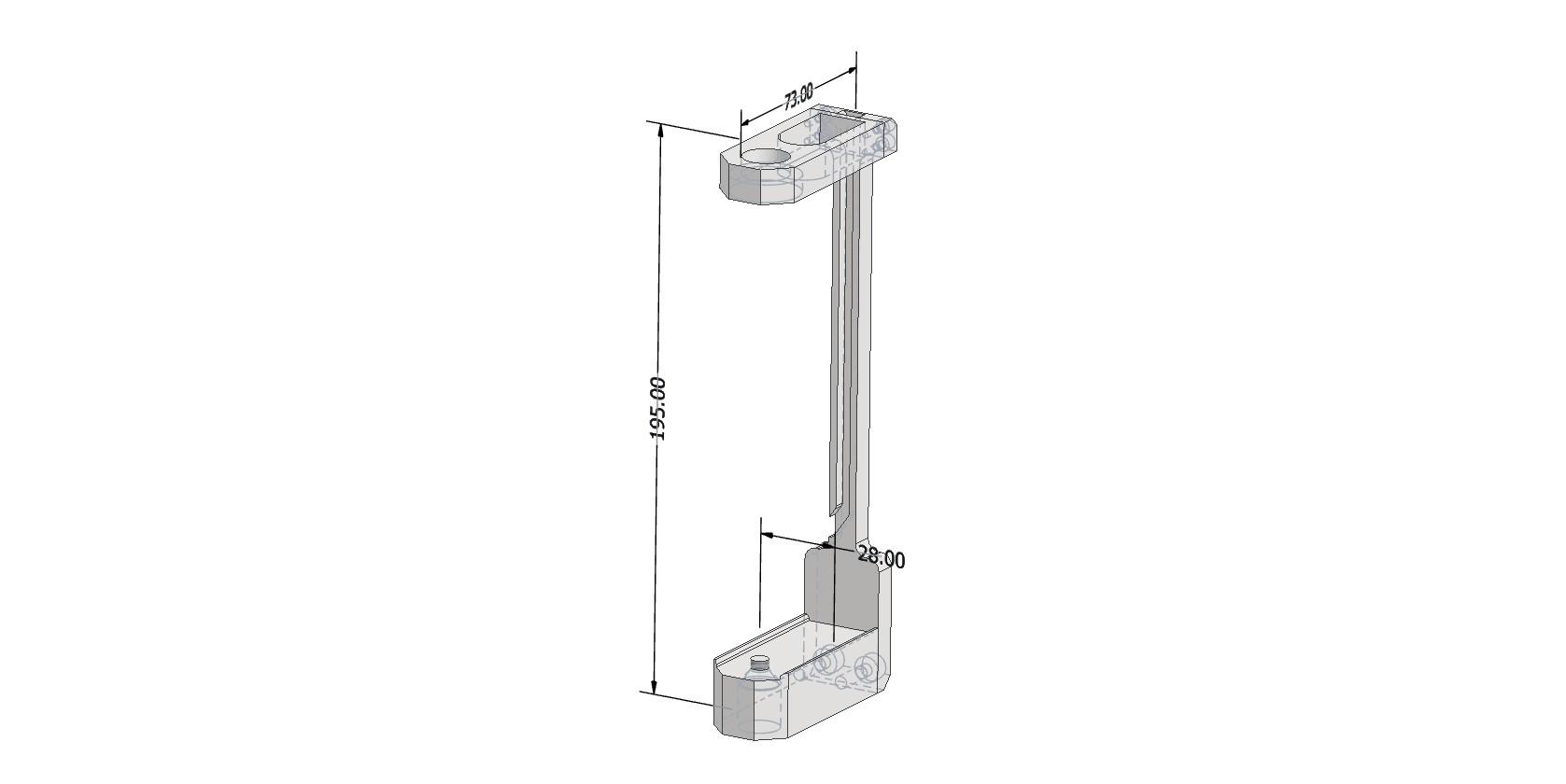](https://knowledge.topodrone.com/uploads/images/gallery/2025-11/kreplenie-insta-360-7.jpg) ##### **Assembly Procedure for the Insta 360 X4 Camera Shooting Kit** The kit is assembled using the standard procedure, with an additional step for camera installation. Sequence of operations: 1\. Install the camera into the bracket. - Secure the Insta 360 X4 camera in the dedicated bracket using the 1/4-inch hex socket flat head screw.  - **Camera orientation:** Position the camera so that the optical axis of the lens located on the display side is aligned with the direction of travel of the scanning system. 2\. Mount the bracket on the pole. - Screw the bracket with the attached camera onto the geodetic pole. 3\. Install the GNSS antenna. - Place the geodetic GNSS antenna on top of the bracket and secure it with the standard mounting screw. - Connect the antenna cable. [](https://knowledge.topodrone.com/uploads/images/gallery/2025-11/img-20250806-165218.jpg)[](https://knowledge.topodrone.com/uploads/images/gallery/2025-11/img-20250806-165221.jpg) [](https://knowledge.topodrone.com/uploads/images/gallery/2025-11/img-20250806-165224.jpg)[](https://knowledge.topodrone.com/uploads/images/gallery/2025-11/img-20250806-165302.jpg) ##### **Insta 360 X4 Camera Settings**Before installing the camera into the bracket and starting data collection, remove all additional accessories from the camera, such as protective cases and lens covers. The presence of any foreign objects on the camera leads to data defects and is not permitted.
The camera configuration parameters are provided in the table below.| Setting | Setting value | Setting value |
| Data acquiring mode | Video 360° | Timelapse 360° |
| Scene selection mode | MegaView | - |
| Resolution | 5.7К | 5.7К |
| Frame Rate | 30 | 30 |
| Interval | - | 0.5 |
| Version 1, powered by SkyPort connector [](https://knowledge.topodrone.com/uploads/images/gallery/2024-12/3eidimage.jpg) 1. TOPODRONE LiDAR 2. Mounting pad with dampers 3. Dovetail mount 4. A set of mounting screws M3x6 5. A set of mounting screws M4x10 6. A set of mounting screws M3x8 7. A set of mounting screws M3x10 8. Helix antenna 9. LEMO 6 PIN – SkyPort Cable 10. Mounting the "spider" antenna with a cable 11. USB Type-C OTG Adapter 12. USB Type-C / USB Flash Drive 13. Thread lock "Blue"\* 14. 2.5mm hex screwdriver \* | Version 2, powered by Type-C connector [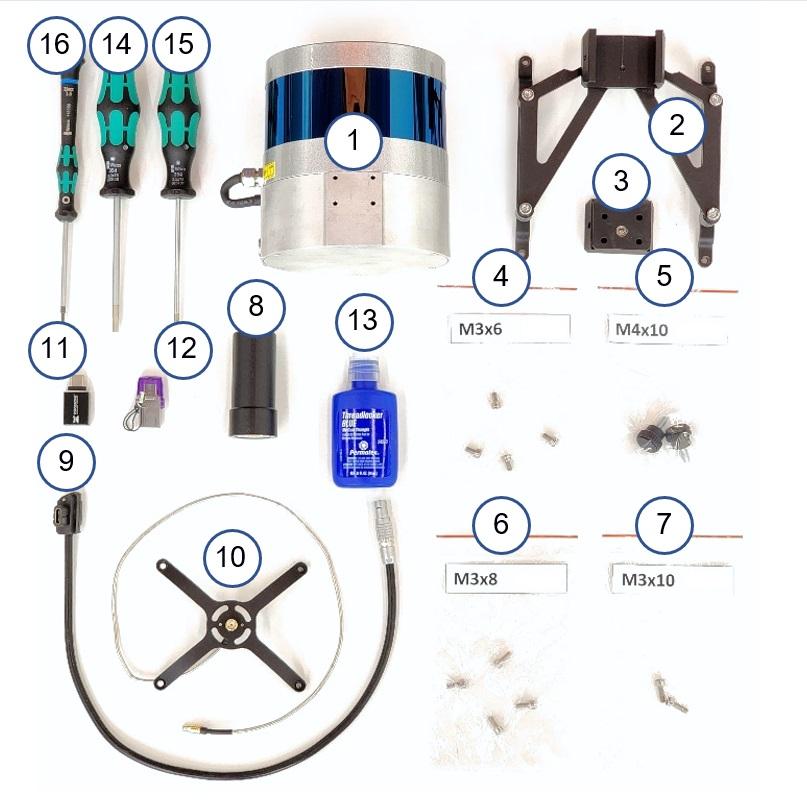](https://knowledge.topodrone.com/uploads/images/gallery/2024-12/4kz1image.jpg) 1. TOPODRONIC LiDAR 2. Mounting pad with dampers 3. Dovetail mount 4. A set of mounting screws M3x6 5. A set of mounting screws M4x10 6. A set of mounting screws M3x8 7. A set of mounting screws M3x10 8. Spiral antenna 9. LEMO 6 PIN – USB Type-C Cable 10. Mounting the "spider" antenna with a cable 11. USB Type-C OTG Adapter 12. New USB Type-C/USB Adapter 13. Thread lock "Blue"\* 14. 2.5mm hex screwdriver\* 15. Phillips Screwdriver\* 16. 1.5mm Hex Screwdriver\* |
| 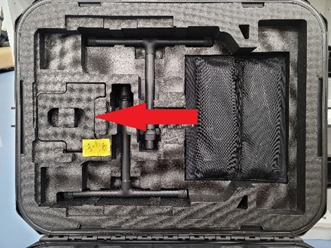 Step 1. Remove the drone's cradle from the case |  Step 2. Install the cradle on the drone |  Step 3. Flip the DJM 300 drone |
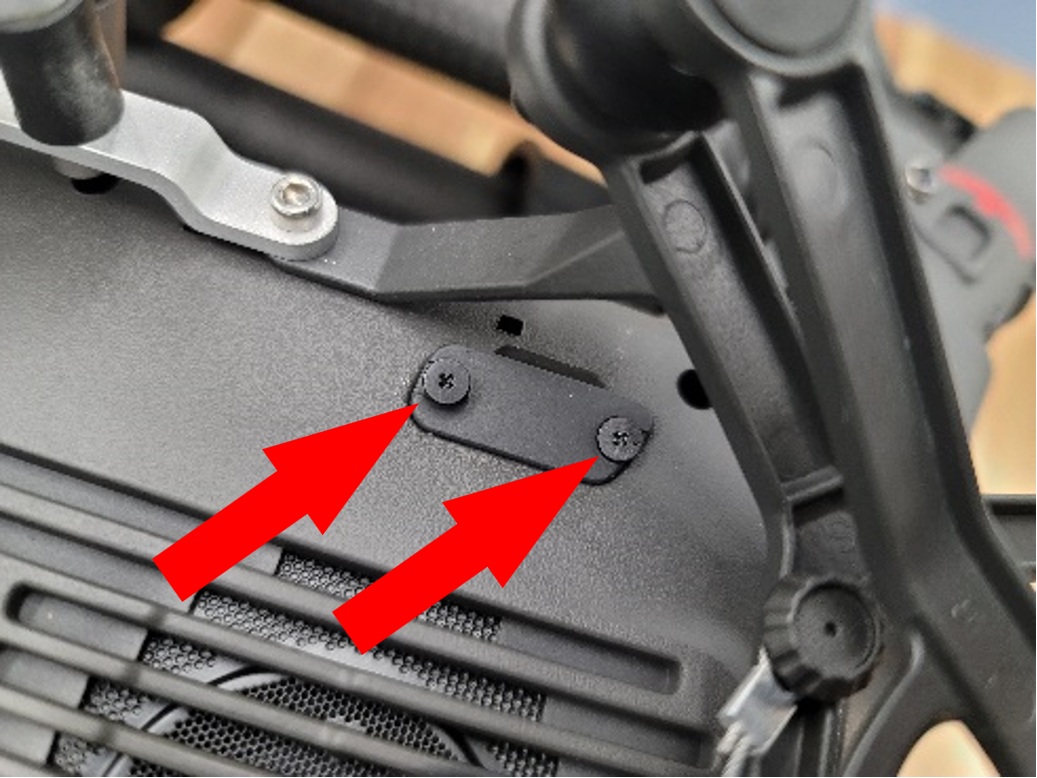
| 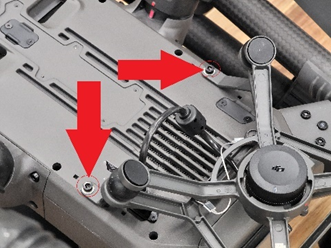 Step 4. Using a 2.5mm Hex screwdriver, unscrew the two black screws and set them aside |  Step 5. Install the mounting pad on the bottom of the drone | [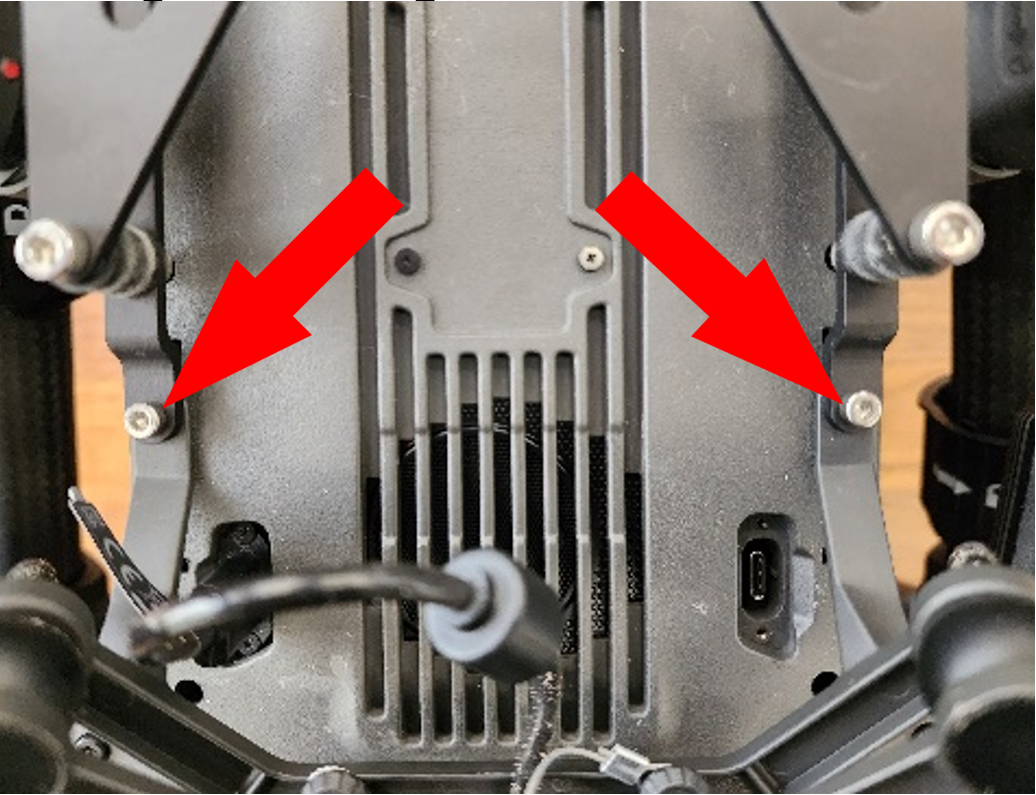](https://knowledge.topodrone.ru/uploads/images/gallery/2024-08/0iKimage.png) Step 6. Using a 2.5mm Hex screwdriver, screw in 2 M3 x 10 screws |
|  Important! Use the thread retainer in this step! Tighten the screws tightly during installation. | [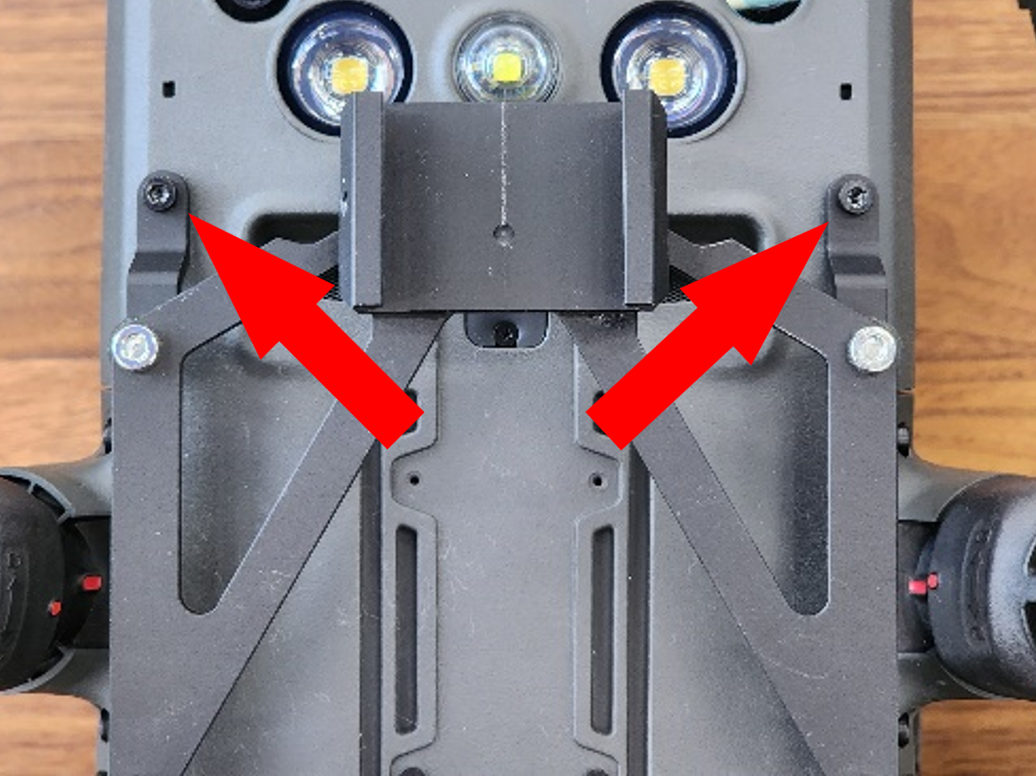](https://knowledge.topodrone.ru/uploads/images/gallery/2024-08/7QDimage.png) Step 7. Using a 2.5mm Hex screwdriver, screw in the 2 black screws obtained in step 4 |  Important! Use the thread retainer in this step! Tighten the screws tightly during installation. |
| [](https://knowledge.topodrone.ru/uploads/images/gallery/2024-08/tRuimage.png) Step 8. (Execution 1). Remove the cover from the SkyPort connector of the LEMO 6 PIN – SkyPort cable | [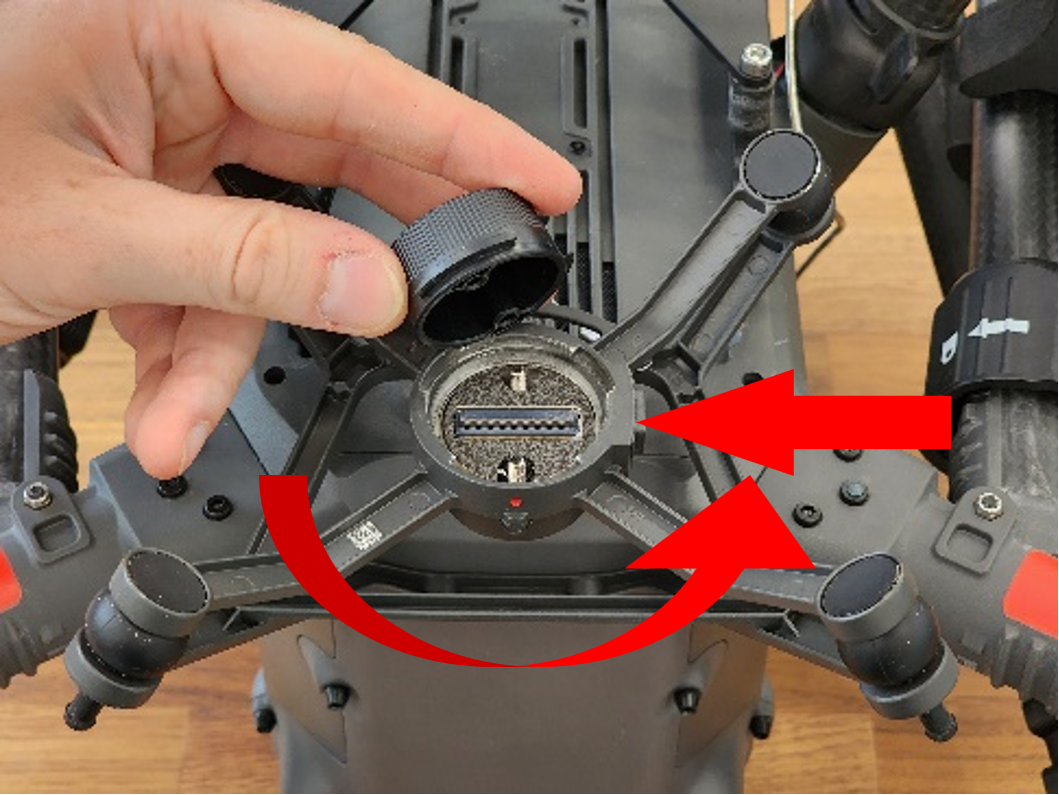](https://knowledge.topodrone.ru/uploads/images/gallery/2024-08/fYsimage.png) Step 9. (Execution 1). Remove the cover from the SkyPort connector of the drone | [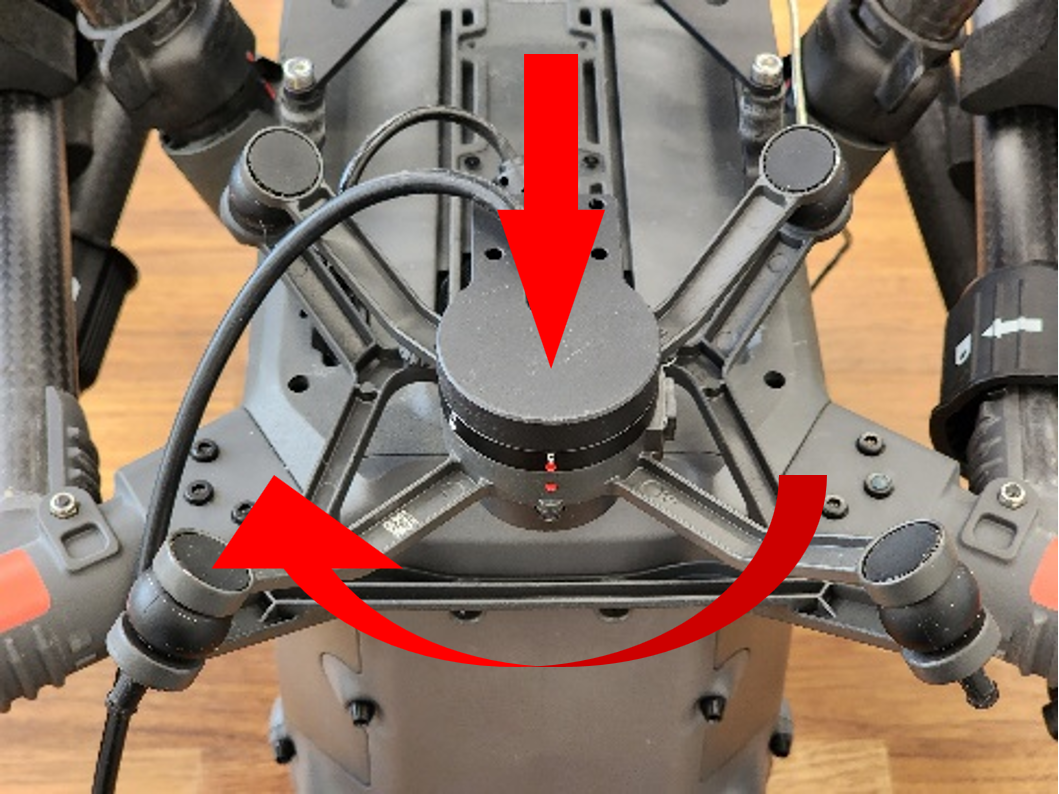](https://knowledge.topodrone.ru/uploads/images/gallery/2024-08/e08image.png) Step 10. (Execution 1). Connect the cable to the SkyPort connector of the drone |
| [](https://knowledge.topodrone.ru/uploads/images/gallery/2024-08/JR0image.png) Step 8. (Execution 2). Using a phillips screwdriver, unscrew the 2 screws of the USB Type-C cover |  Step 9. (Execution 2). Install the USB Type-C cable connector into the drone, following the key pattern | [](https://knowledge.topodrone.ru/uploads/images/gallery/2024-08/h3fimage.png) Step 10. (Execution 2). Using a 1.5mm hex screwdriver, tighten the locking screw |
|  Step 11. Turn over the DJI 300 RTK, remove the bed | [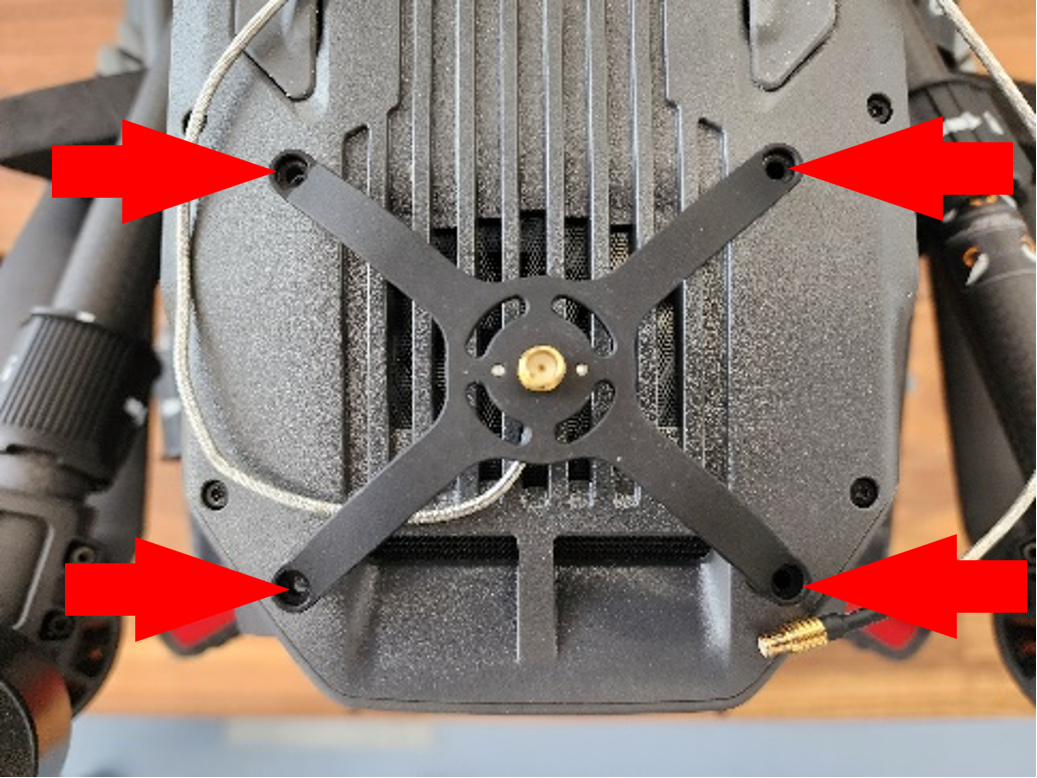](https://knowledge.topodrone.ru/uploads/images/gallery/2024-08/XBYimage.png) Step 12. Install the "spider" type antenna mount on the top of the drone | 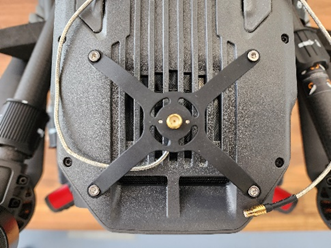 Step 13. Secure the mount using M3x6 screws and a 2.5mm Hex screwdriver. |
|  Important! Use the thread retainer in this step! Tighten the screws tightly during installation. |  Step 14. Lay the cable along the housing as shown in the photo | 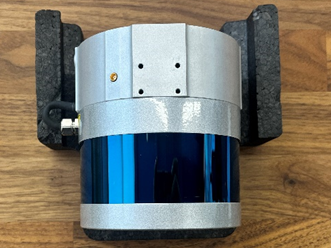 Step 15. Put the TOPODRONE LiDAR on the drone bed, the antenna connector should be on top |
|  Step 16. Install the dovetail mount and tighten the M3x8 screws with a screwdriver |  Important! Use the thread retainer in this step! Tighten the screws tightly during installation. | 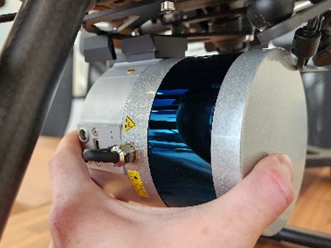 Step 17. Install the TOPODRONE LiDAR on the quick-release mount |
| [](https://knowledge.topodrone.ru/uploads/images/gallery/2024-08/sXdimage.png) It is recommended to install LiDAR from front to back | [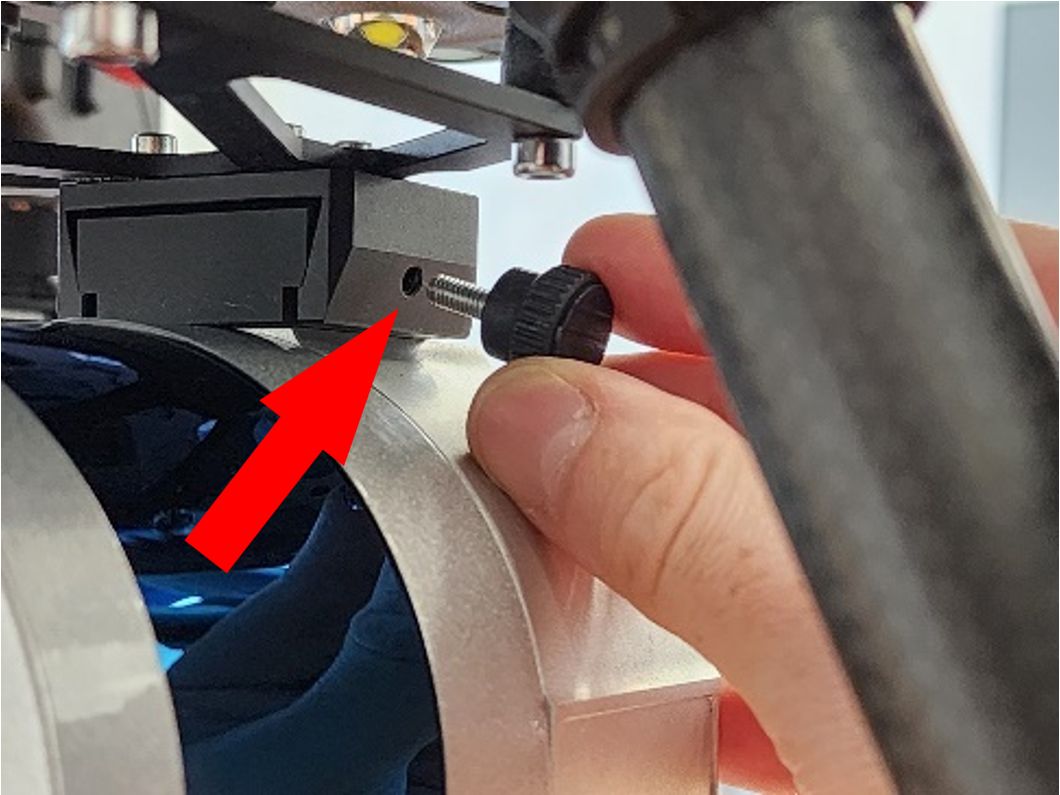](https://knowledge.topodrone.ru/uploads/images/gallery/2024-08/WDLimage.png) Step 18. Screw in the locking wing screw |  Шаг 19. Винт должен быть закручен плотно, но без чрезмерного усилия |
|  Шаг 20. Подключите антенный разъём к лазерному сканеру |  После подключения антенного разъема он должен выглядеть как на фото | 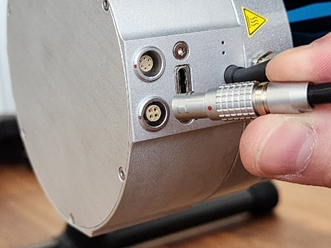 Step 19. The screw must be screwed tightly, but without excessive force |
|  After connecting the power connector, it should look like in the photo |  Step 22. Screw the GNSS antenna onto the spider-type mounting connector. | 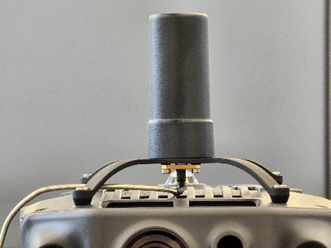 The GNSS antenna should be twisted tightly, but without excessive force |
|  Step 23. In order not to lose the protective caps, you can connect them together |  Step 24. The drone assembly with TOPODRONE LiDAR looks like this |  You can start performing ALS |
| [](https://knowledge.topodrone.ru/uploads/images/gallery/2024-10/a1Ximg-20231222-114837.jpg) | [](https://knowledge.topodrone.ru/uploads/images/gallery/2024-10/img-20231222-114837-kopiia.jpg) |
The file system format of the TOPODRONE LiDAR MicroSD is exFAT.
The first activation (cold start) of the laser scanner in an open area with a sufficient GNSS signal level (8 or more satellites) may take more time to pass the initialization procedure than subsequent activations. As a rule, at the first start of the TOPODRONE LiDAR it takes no more than 60 seconds until the start of data recording. In case of subsequent power-ups (warm start) the initialization procedure is faster (20-30 seconds). In case of starting to move along the route, initialization may not be performed correctly during the movement.
It is necessary to check the LiDAR initialization status each time before launching the drone on an automatic mission or starting a walking route, as well as before finishing the work. In case the initialization status at the end of the route is not displayed by the constant LED, it means that the GNSS signal was lost during the route. In this case, the data received from the TOPODRONE LiDAR will be unsuitable for further post-processing.
# Overlaps between scans and the height of the scanned objects During the flight, TOPODRONE LiDAR scans an area of the surface of a certain width, which is called a "scan". The width of the scan is determined by the technical characteristics of the sensor, the operating altitude of the flight, as well as the difference in terrain. For correct postprocessing of the data obtained from TOPODRONE LiDAR, it is necessary that neighboring scans have a common overlap. It is recommended to provide at least 30% lateral overlap to adjacent scans. Insufficient overlap between scans, especially in combination with significant relief differences, can lead to the formation of an area without data, which significantly reduces the quality of output materials. On the other hand, a higher overlap value allows the most accurate calculation of the calibration angles of Roll, Pitch and Heading. When choosing a specific overlap value, it is necessary to take into account such parameters as the maximum length of the laser beam, the scanning angle (106 degrees for ALS) and the height of the scanned object. To achieve optimal results when performing ALS using TOPODRONE LiDAR, it is recommended to set the following parameters when building a mission:| 1 | 2 | 3 | 4 | 5 | ||||||
| LiDAR model, maximum beam length | Working height, m | Scan width, m | Distance between scan centers: % overlap | Maximum height of the scanned object: % overlap | ||||||
| 30% | 40% | 50% | 60% | 30% | 40% | 50% | 60% | |||
| TOPODRONE LiDAR 100+ и 100 120 m | 50 | 134 | 94 | 81 | 67 | 54 | 15 | 20 | 25 | 30 |
| 60 | 160 | 112 | 96 | 80 | 64 | 18 | 24 | 30 | 36 | |
| 70\* | 187 | 131 | 113 | 94 | 75 | 21 | 28 | 35 | 42 | |
| 80\*\* | 136 | 96 | 82 | 68 | 55 | 24 | 32 | 41 | 49 | |
| TOPODRONE LiDAR 200+ 300 m | 90 | 240 | 168 | 144 | 120 | 96 | 27 | 36 | 45 | 54 |
| 100 | 267 | 187 | 161 | 134 | 107 | 30 | 40 | 50 | 60 | |
| 110 | 292 | 205 | 176 | 146 | 117 | 33 | 44 | 55 | 66 | |
| 120\* | 240 | 168 | 144 | 120 | 96 | 36 | 48 | 60 | 72 | |
| 130\* | 260 | 182 | 156 | 130 | 104 | 39 | 52 | 65 | 78 | |
| 140\*\* | 235 | 165 | 141 | 118 | 94 | 42 | 56 | 70 | 84 | |
| 150\*\* | 250 | 177 | 152 | 126 | 101 | 45 | 60 | 75 | 90 | |
| [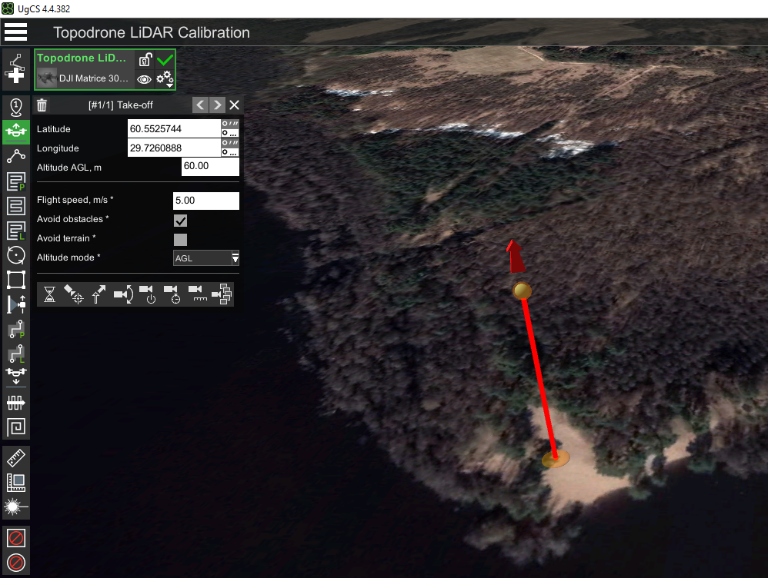](https://knowledge.topodrone.com/uploads/images/gallery/2024-10/1.png) Setting the waypoint before starting the calibration pattern "figure eight" in UgCS Pro / Expert software. |
| [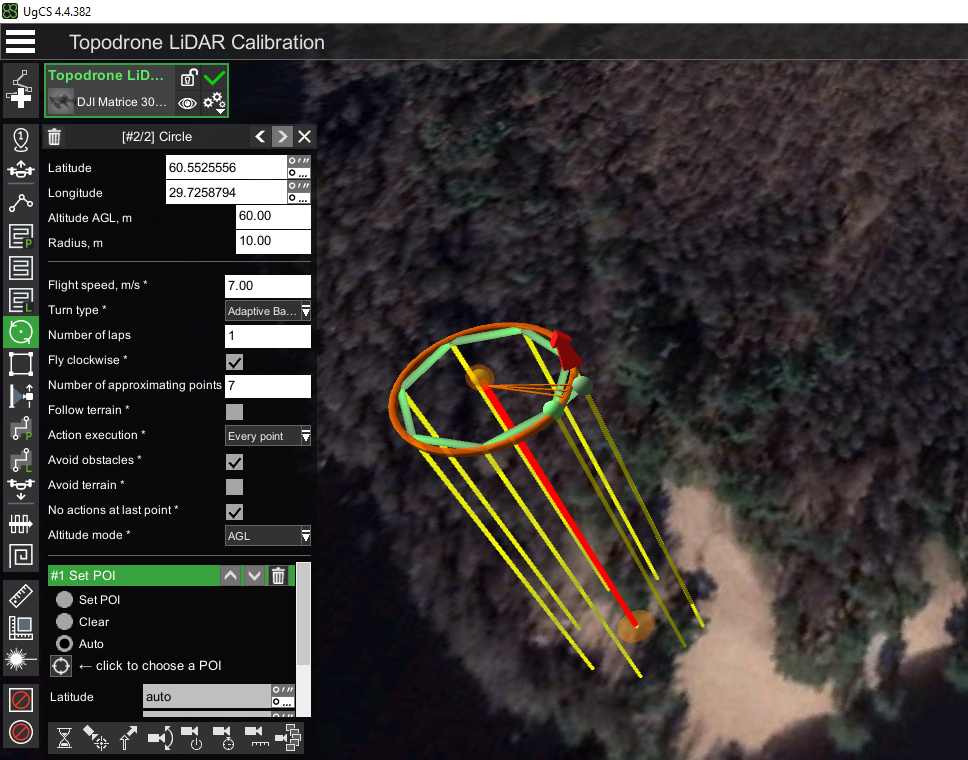](https://knowledge.topodrone.com/uploads/images/gallery/2024-10/2.png) Setting the first circle of the calibration pattern "figure eight" in UgCS Pro / Expert software. Pay attention to the necessity of deleting the POI action |
| [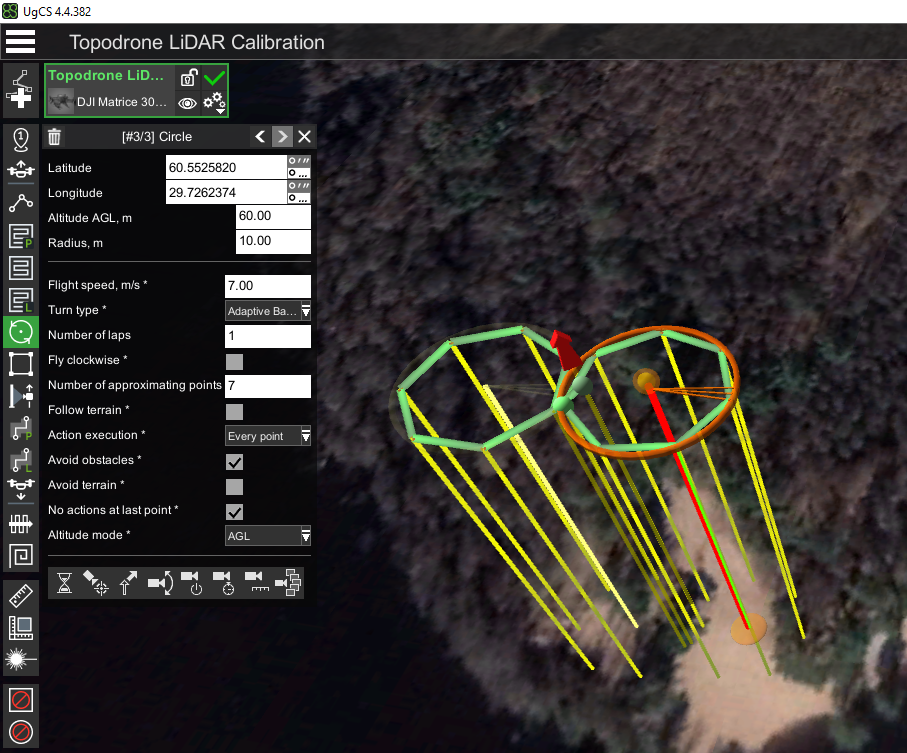](https://knowledge.topodrone.com/uploads/images/gallery/2024-10/3.png) Setting the second circle of the calibration pattern "figure eight" in UgCS Pro / Expert software. |
Note the need to fly in circles in different directions.
##### Calibration of the TOPODRONE ALS laser scanner in manual mode. If it is impossible to perform the calibration pattern in automatic mode (no UgCS Pro / Expert software), it is necessary to perform this pattern in manual mode before starting the flight along the main route. To do this, perform the following actions: 1. Prepare the DJI quadcopter and TOPODRONE LiDAR for use in open terrain, according to the instructions, when there is sufficient GNSS signal strength. 2. Turn on the drone, wait for the initialization procedure of the drone and TOPODRONE LiDAR 3. Calibrate the DJI quadcopter compass before launching the drone, according to the drone's instructions. 4. Performing compass calibration is strictly necessary each time before the first flight on a new terrain. 5. Manually in P mode take off to operating altitude. 6. When the drone reaches the working altitude, switch to "T" mode - Tripod (if available). 7. Perform pattern using the control sticks. To fly in the first circle (clockwise), hold the left stick to the right and the right stick forward. This combination will allow the DJI quadcopter to circle while maintaining altitude. After the drone completes the first circle, without changing the right stick position (forward), change the left stick position to counterclockwise (left). 8. In the case of "T" - Tripod mode, you can maneuver the sticks by pushing them to their extremes. Speed limitation and smoothness will be achieved due to the flight characteristics of the "T" Tripod mode. If the Tripod mode is not available in the quadcopter as one of the flight modes, we recommend that you maneuver the sticks as smoothly as possible without sudden movements. 9. After completing the second lap pass, the calibration pattern is completed. After completing the calibration procedure of the TOPODRONE LiDAR in manual mode, send the flight task to the quadcopter and start the main part of the flight. 10. While performing a figure-eight flight, you can control the turning radius of the drone using the Map view in the app on your mobile device, as well as visually by looking at the drone in flight in the sky. ##### Performance of the calibration pattern for MLS using TOPODRONE BackPack. 1. Prepare TOPODRONE BackPack and TOPODRONE LiDAR for operation in the open terrain, according to the instructions, if there is sufficient GNSS signal strength. 2. Make sure there are no objects of any kind within at least 100 meters: buildings, hills, fences, wires, etc. Power up the TOPODRONE LiDAR scanner with the included external battery and power cable. 3. Wait for the laser scanner initialization procedure. 4. Place the backpack over the operator's shoulders. 5. Walk at a constant speed of 5-9 km/h in two circles with a radius of 10-15 meters clockwise and counterclockwise. Each circle must be closed before the start of the next stage. 6. After completing the second lap pass, the calibration pattern is complete. You can proceed to the main task. ##### Performing the calibration pattern for the MLS when using a vehicle mount. 1. Prepare the TOPODRONE car mount and laser scanner for operation in the open area according to the instructions, if there is a sufficient GNSS signal level. 2. Make sure there are any objects within at least 100 meters: buildings, hills, fences, wires, etc. 3. Place the car mount together with the laser scanner on the roof of the car in such a way that the cable coming out of the sensor and going into the TOPODRONE housing should face backwards in the direction of travel. 4. Power up theTOPODRONE LiDAR scanner with the included external battery and power cord. 5. Wait for the laser scanner initialization procedure. 6. Perform a drive at a constant speed of 20-30 km/h forward for a distance of 50-100 meters with a return to the starting point in reverse at the same speed. Repeat this step 2-3 times. 7. Once the passes are completed, the calibration pattern is done. You can proceed to the main task. [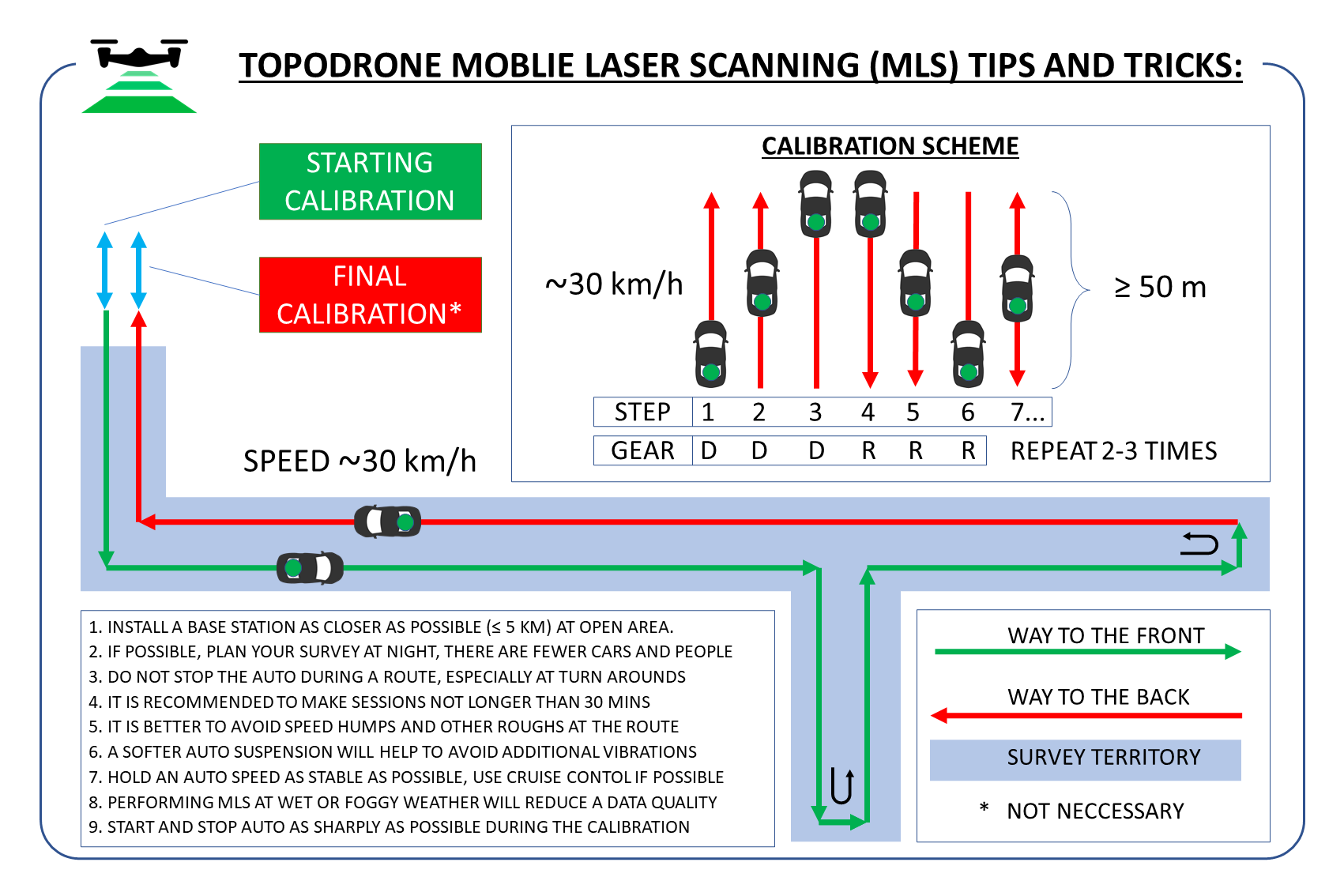](https://knowledge.topodrone.com/uploads/images/gallery/2024-10/topodrone-mls-tricks-and-tips.png) # Airborne Laser Scanning (ALS) The TOPODRONE LiDAR is designed to perform airborne laser scanning (ALS). To perform this procedure, you will need a drone that supports the correct installation of the TOPODRONE LiDAR and is capable of following a planned flight path. One such drone, for example, is the DJI M300/350 RTK. ##### **TOPODRONE LiDAR ALS rules:** 1\. Neighboring spans (hereinafter for simplification - scans) should have a lateral overlap of 30% or more. 2. 2\. Scans should be parallel to each other 3\. The drone must follow neighboring scans in forward and reverse directions 4\. The movement speed of the drone with the TOPODRONE LiDAR on the main section of the ALS should be constant 5\. The distance from the TOPODRONE LiDAR to the ground surface shall be constant 6\. To obtain correct ALS data, it is recommended to take at least two scans 7\. Use original propellers to reduce vibration 8\. Do not fly in squall winds or during precipitation to reduce noise 9\. After initializing the TOPODRONE LiDAR and taking off, perform a calibration maneuver before the main ALS section of each flight 10\. If the flight takes more than 30 minutes, it is recommended to perform the calibration maneuver again when the session time reaches 30 minutes after turning on the TOPODRONE LiDAR. ##### **ALS and the terrain elevation:** At insignificant height differences at the ALS location (up to 10 meters) it is allowed to fly the drone with TOPODRONE LiDAR at a fixed altitude (AMSL). The altitude of the drone flight is set relative to the altitude of the takeoff point. Accordingly, for the main part of the flight, almost any software can be used, allowing to set the flight on a circle (to perform the calibration maneuver), as well as to set the distance between parallel passages. If altitude differences at the ALS location (10 meters or more) are exceeded, it is necessary to use software that supports the “elevation envelope” (AGL) function for ALS route planning. The most convenient way to plan such routes is to use UgCS Expert software.**This is an example of UgCS Expert software and DJI M300/M350 RTK:**
1. Install **UgCS Expert** software and open it. [](https://knowledge.topodrone.com/uploads/images/gallery/2024-10/1-en.png) 2. Create a new mission and create a route for the **DJI M300** **RTK** or **DJI M350 RTK** drone profile [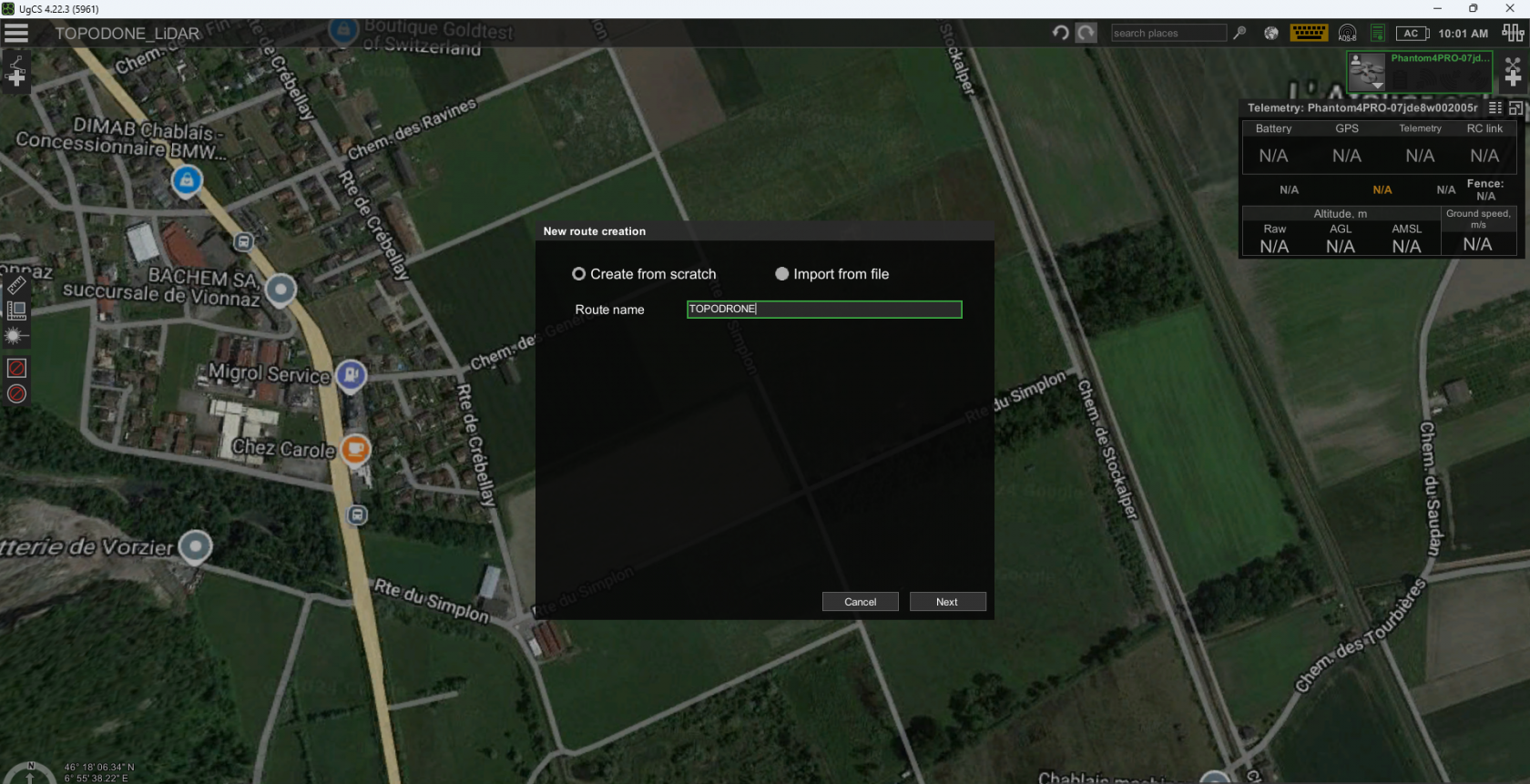](https://knowledge.topodrone.com/uploads/images/gallery/2025-01/2-en-11.png) [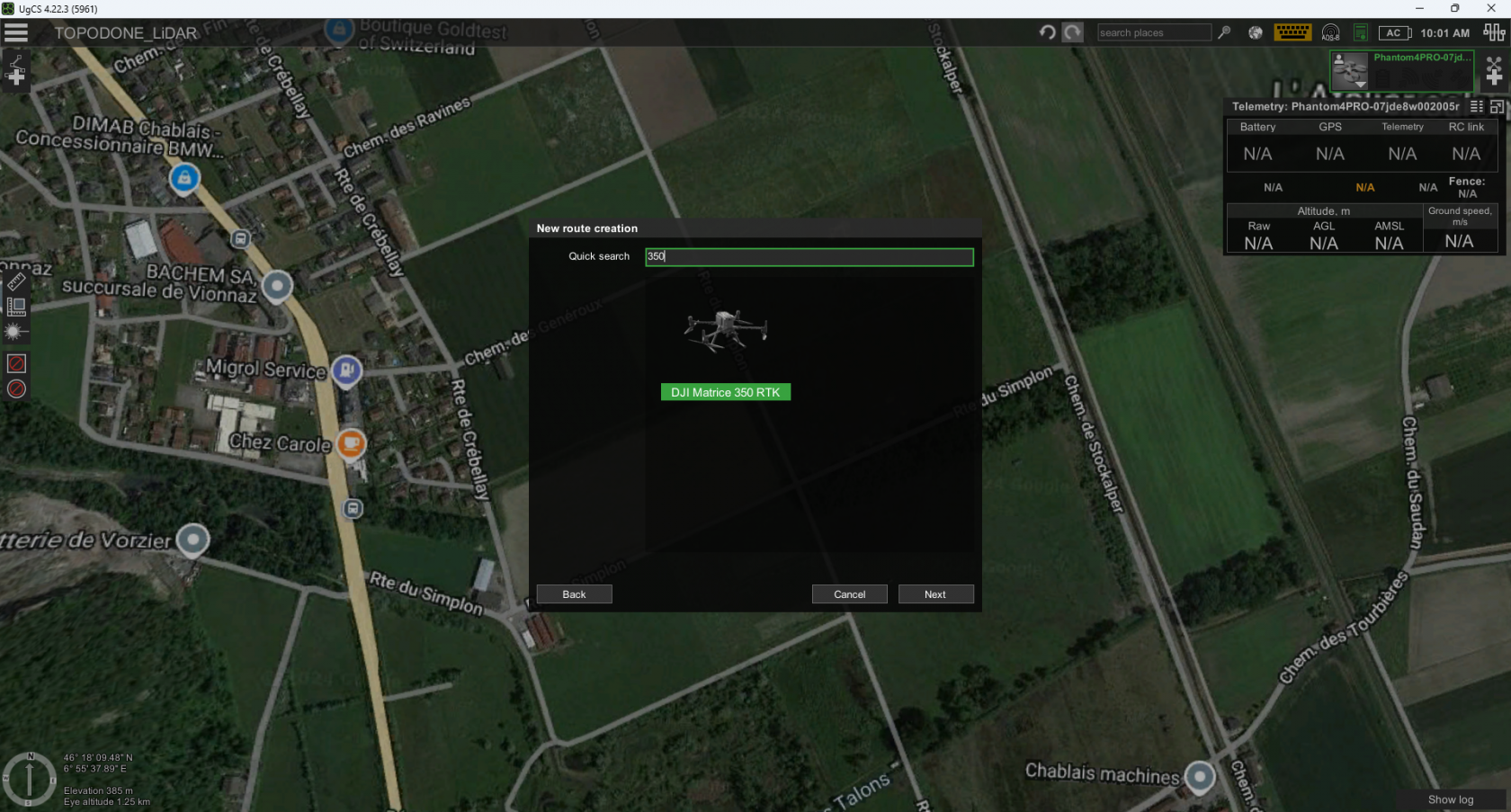](https://knowledge.topodrone.com/uploads/images/gallery/2024-10/3-en.png) [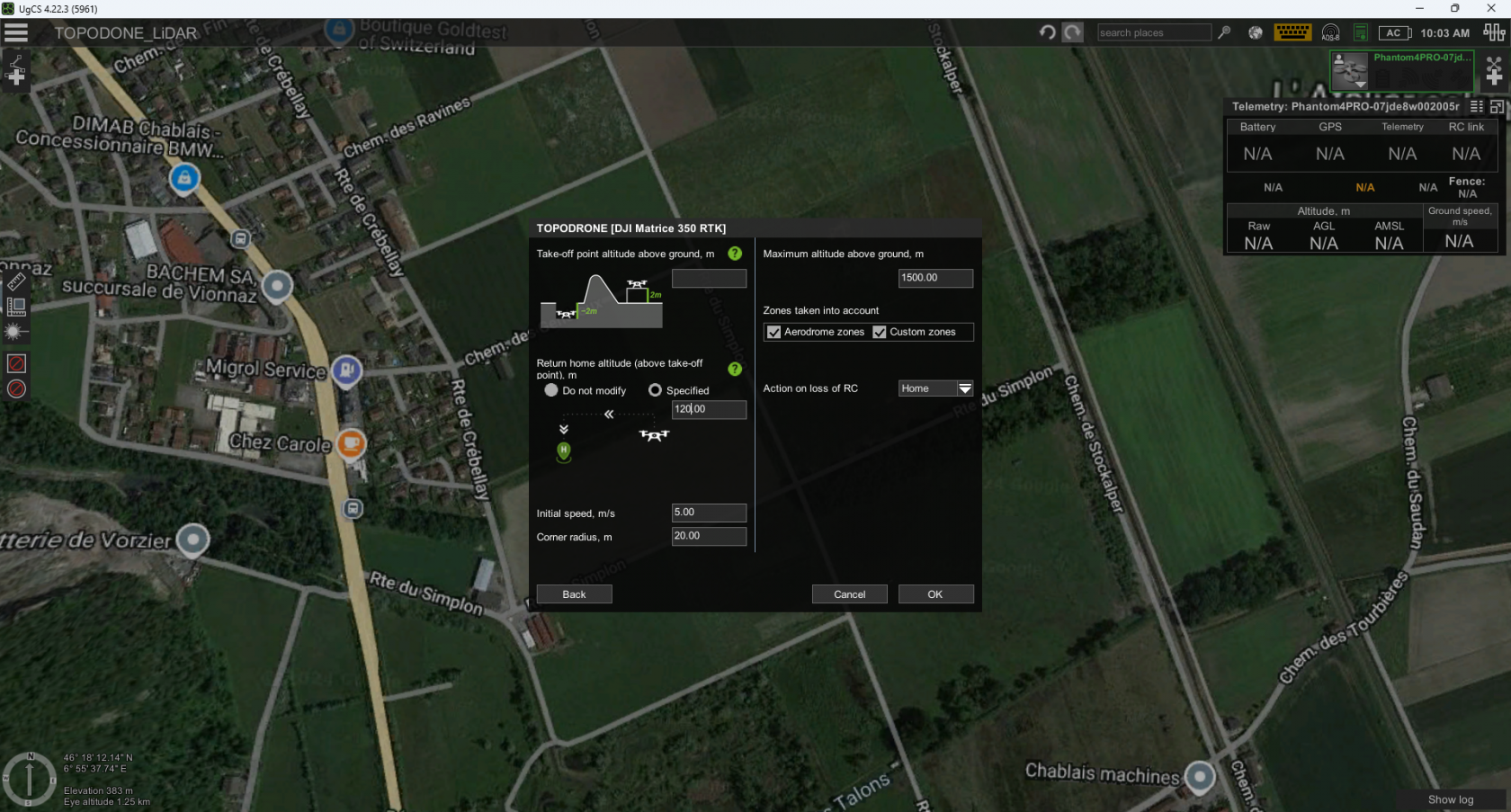](https://knowledge.topodrone.com/uploads/images/gallery/2024-10/4-en.png) [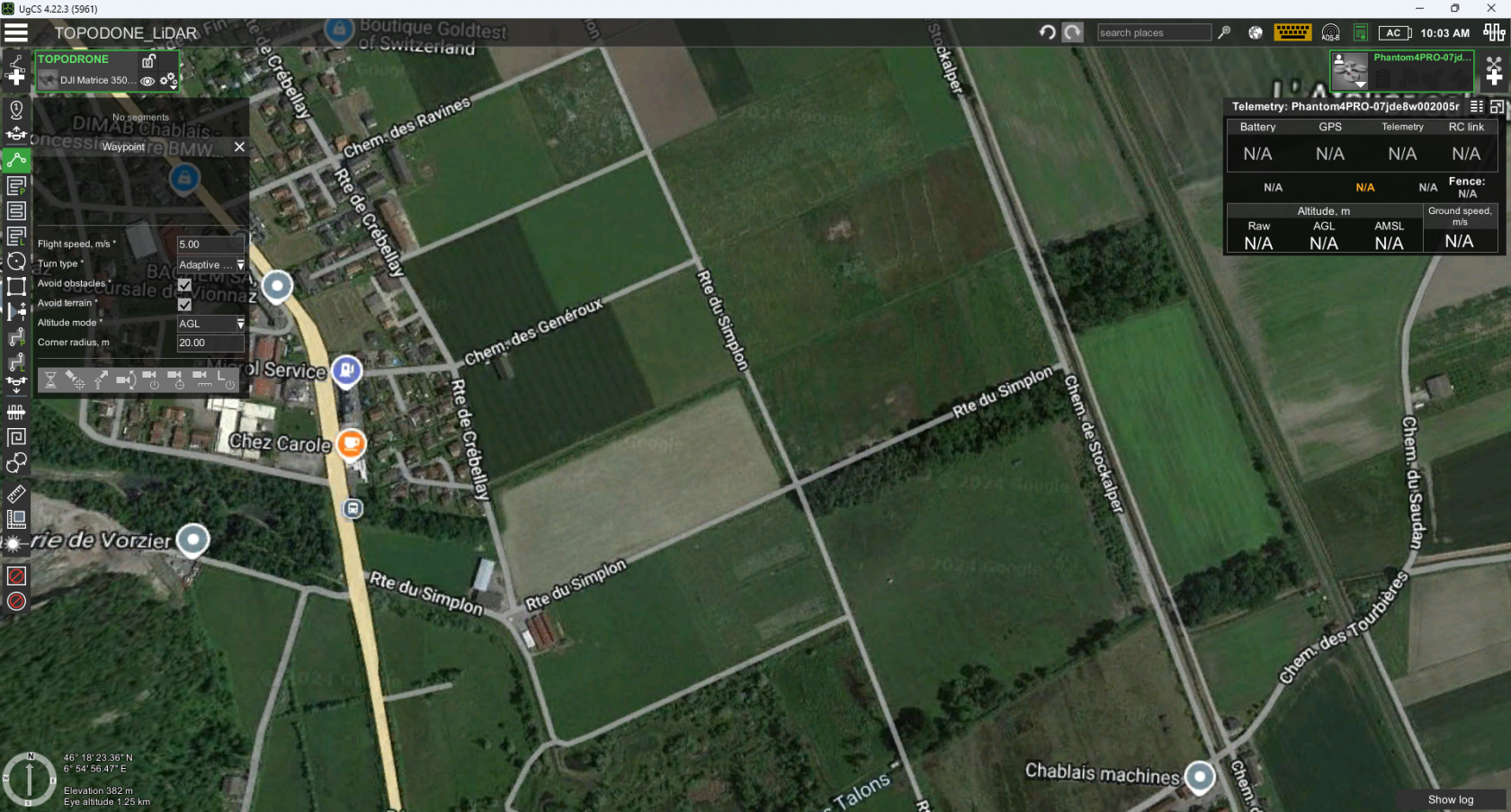](https://knowledge.topodrone.com/uploads/images/gallery/2024-10/5-en.png) 3. Using the “**Pattern**” tool set a calibration maneuver in the form of an infinity sign as close as it possible to a route start point [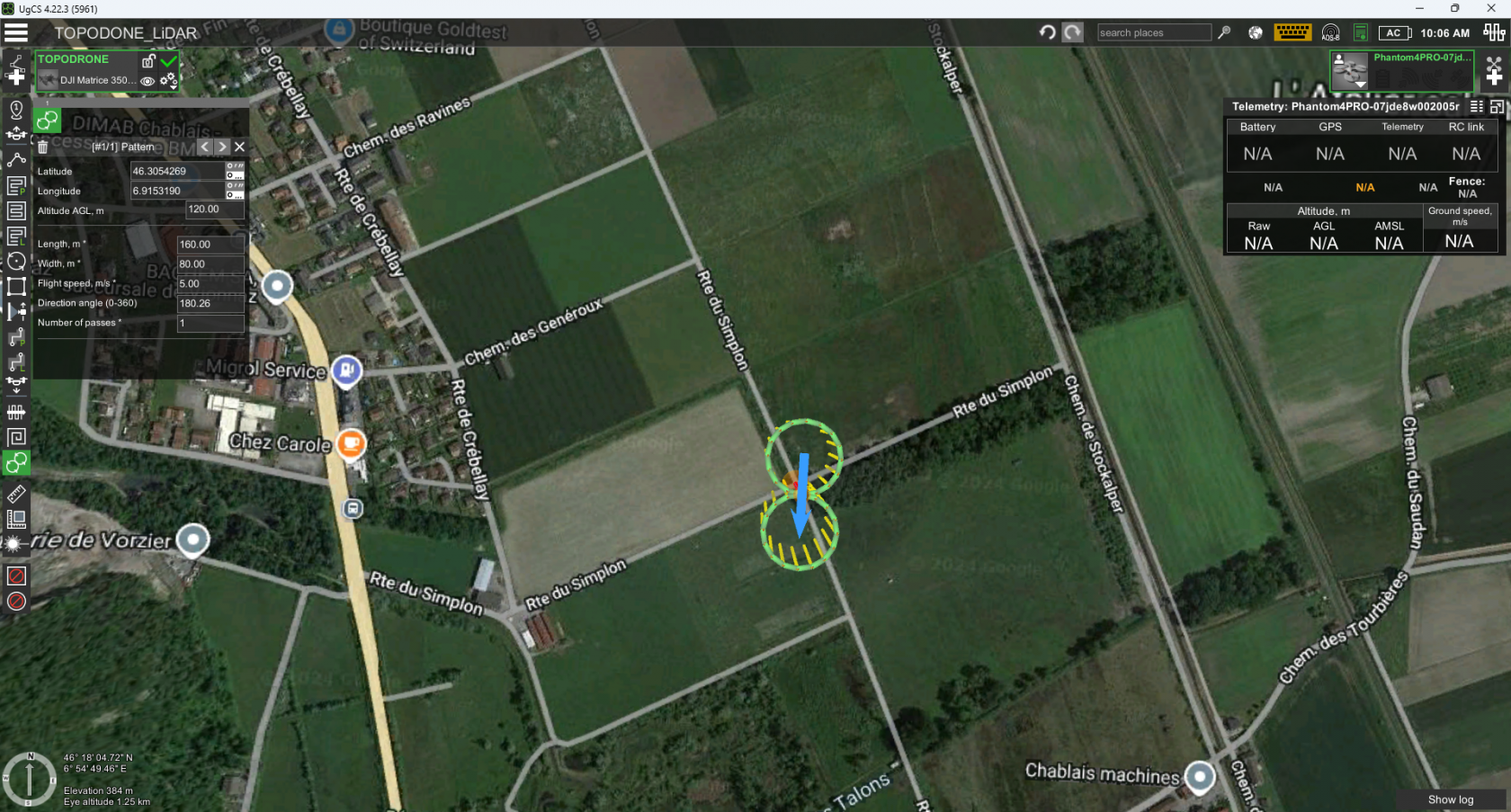](https://knowledge.topodrone.com/uploads/images/gallery/2024-10/6-en.png) 4. Set the “**Length**” and “**Width**” parameters to 80 and 40 meters respectively [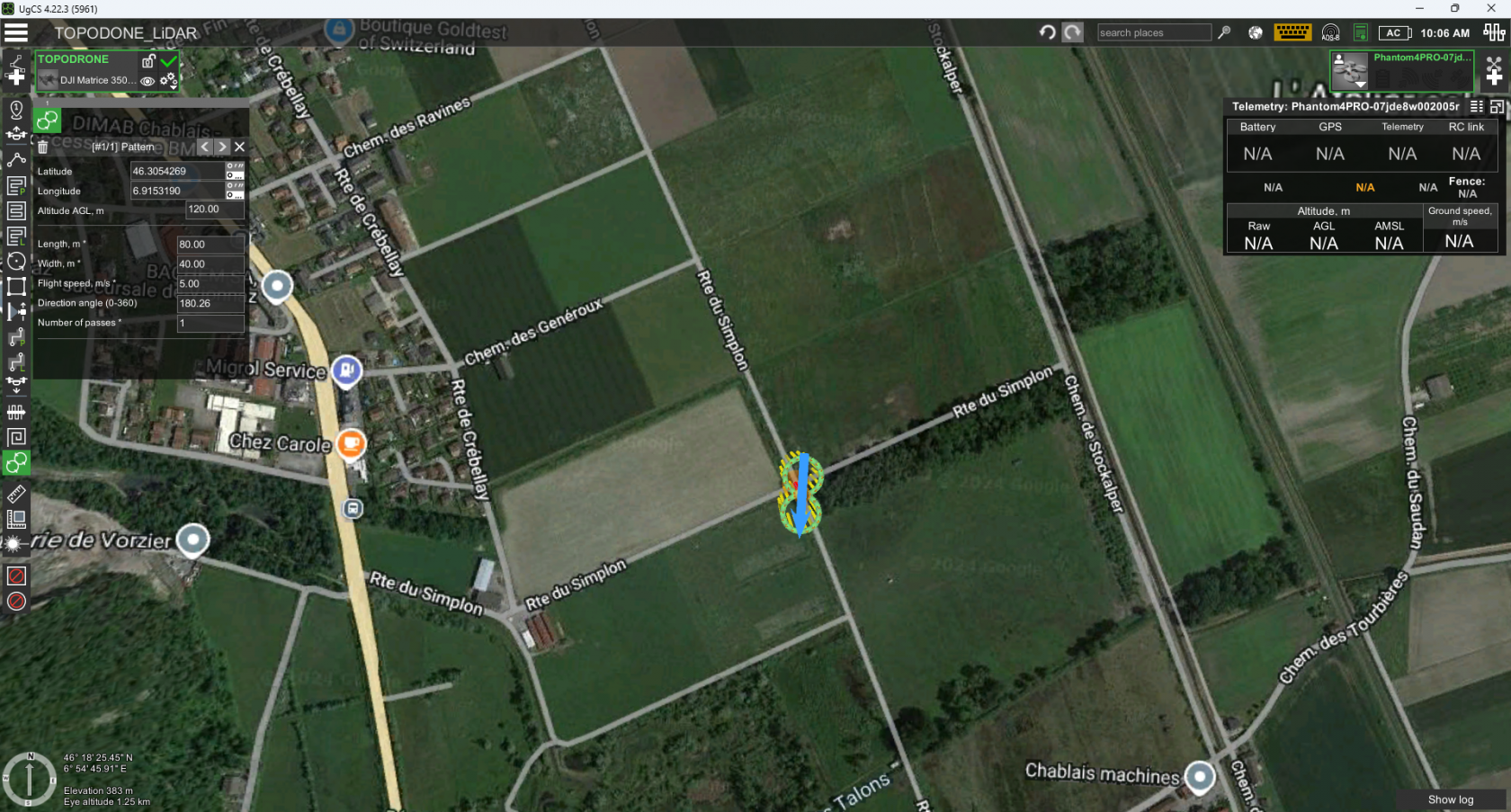](https://knowledge.topodrone.com/uploads/images/gallery/2024-10/7-en.png) 5. Set the “**Altitude**” and “**Flight speed**” parameters to the altitude and speed of the intended route execution [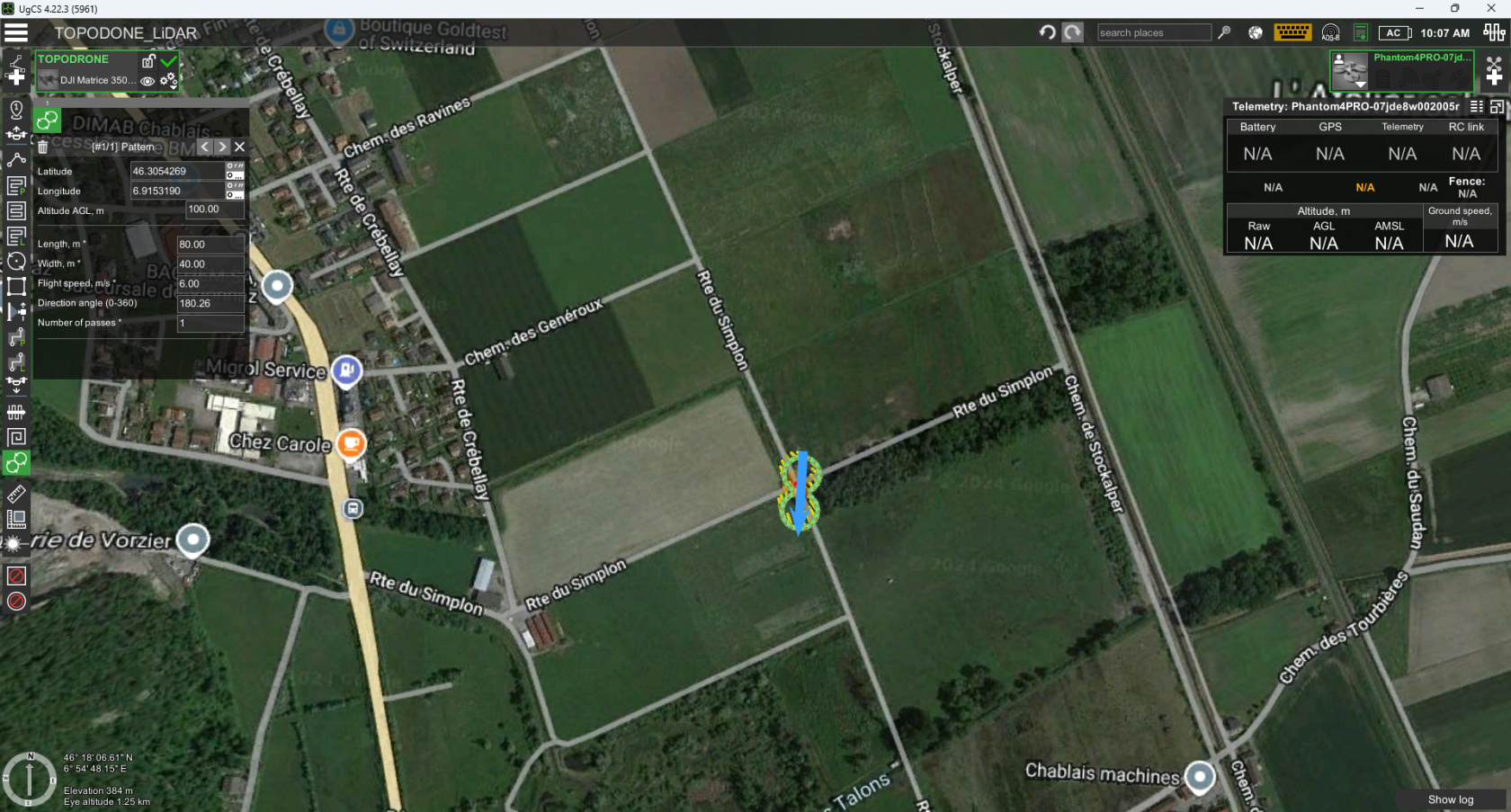](https://knowledge.topodrone.com/uploads/images/gallery/2024-10/8-en.png) 6. Using the “**Area LiDAR**” tool set the area of ALS [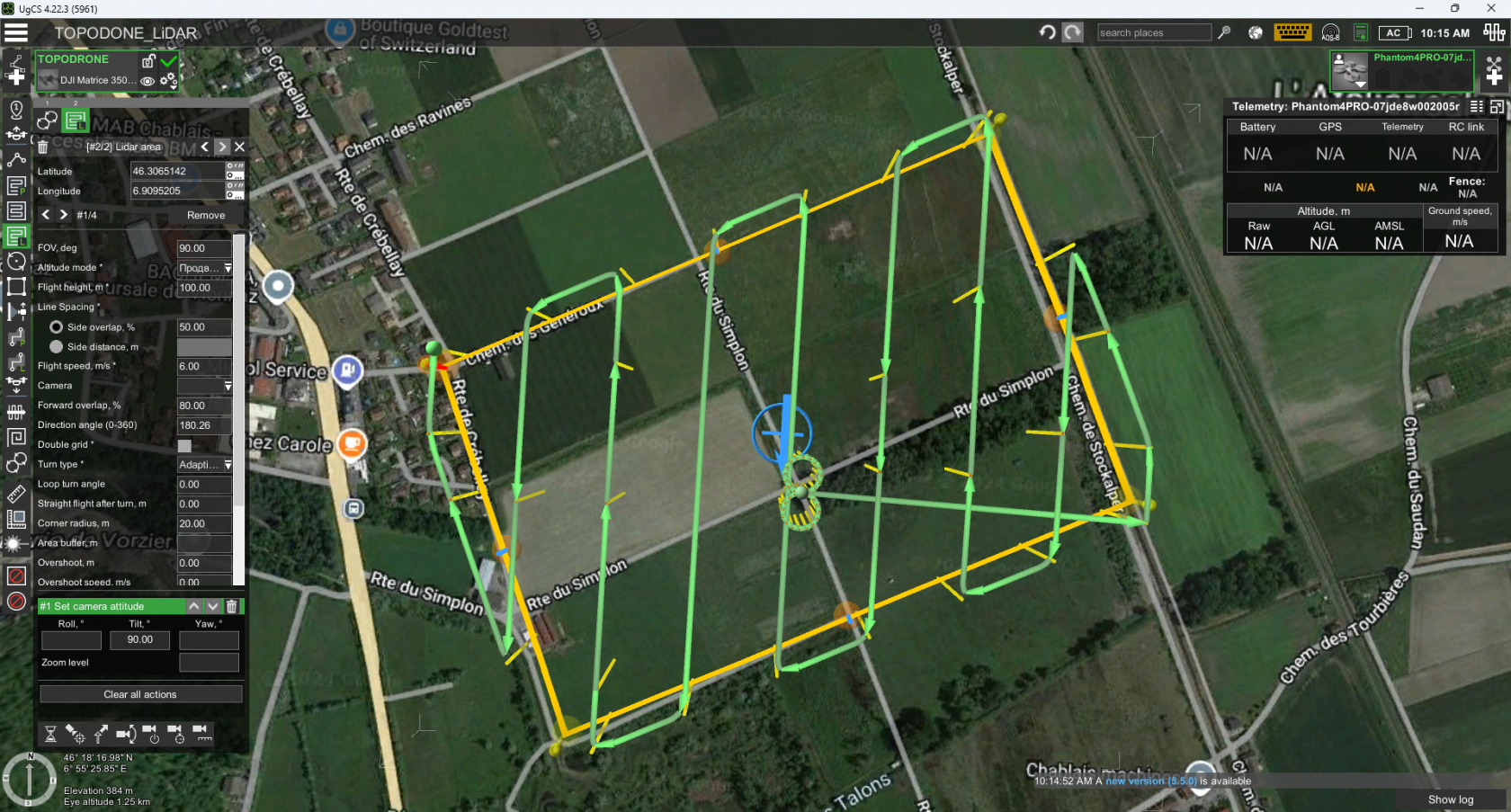](https://knowledge.topodrone.com/uploads/images/gallery/2024-10/9-en.png) 7. Set the “**FOV**” parameter to 106 degrees. 8. Set the “**Altitude Mode**” parameter to AGL or Smart AGL for terrain envelope. 9. Set the“**Side Overlap, %**” to at least 30%, recommended 40-60%. 10. Set the “**Flight height**” parameter to the recommended values for the TOPODRONE LiDAR model. 11. Set the “**Speed**” parameter in the range of 3-12 m/s according to the required performance and point cloud density. 12. Set the “**Turn type**” parameter to Adaptive Bank Turn. 13. Uncheck “**IMU Calibration**” if it is set by default| [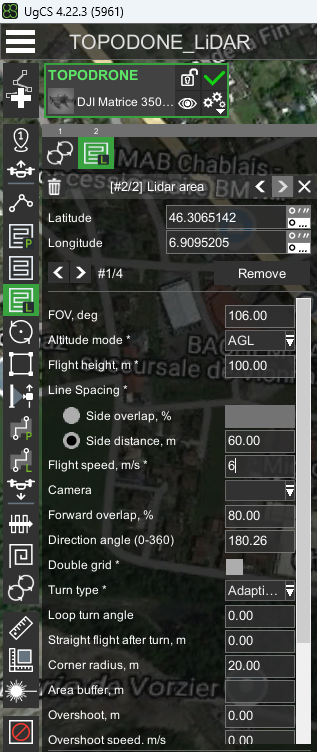](https://knowledge.topodrone.com/uploads/images/gallery/2024-10/6QS10-en.png) | [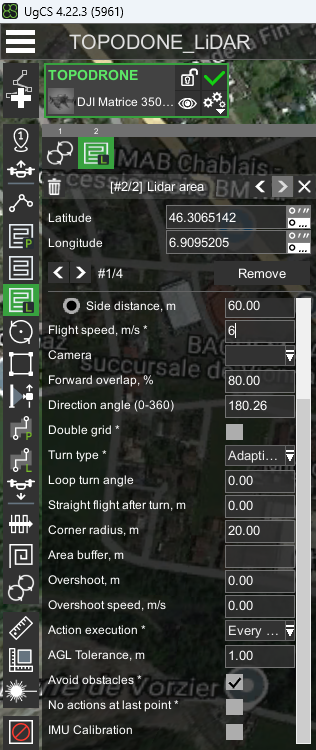](https://knowledge.topodrone.com/uploads/images/gallery/2024-10/NhT11-en.png) |
| [](https://knowledge.topodrone.com/uploads/images/gallery/2024-10/13-en.png) | [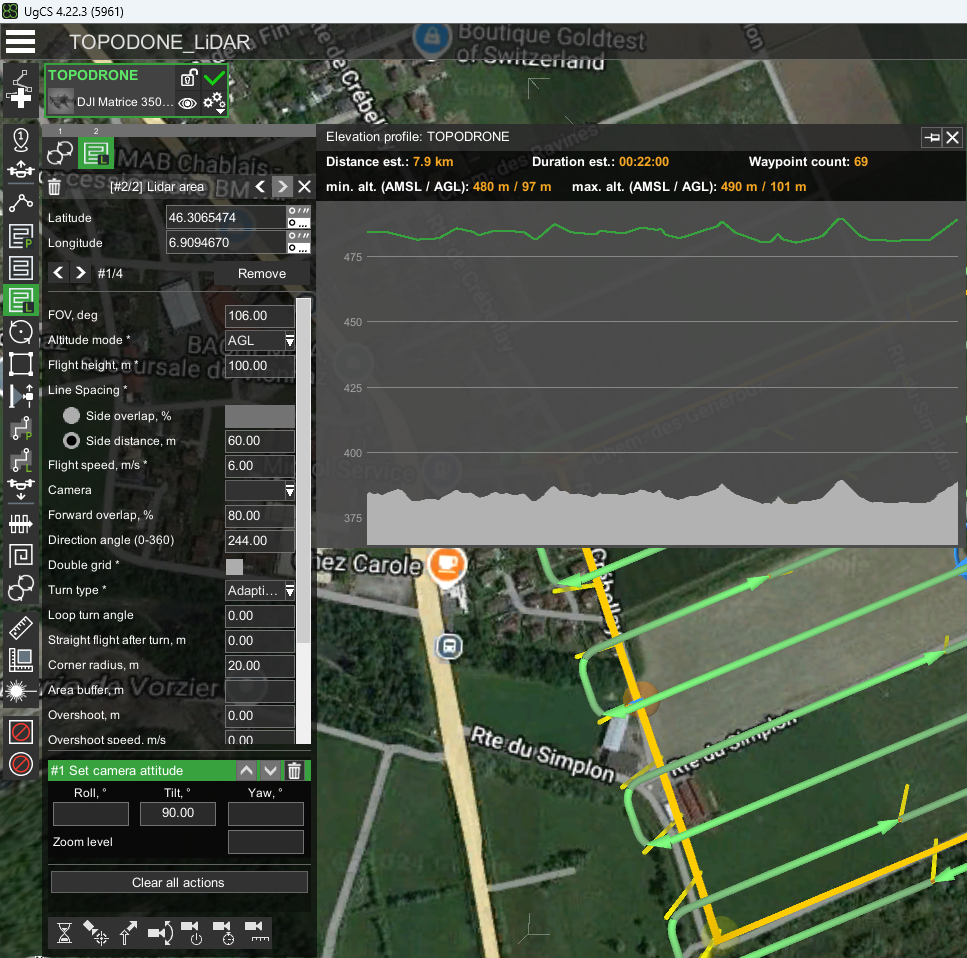](https://knowledge.topodrone.com/uploads/images/gallery/2024-10/snimok-ekrana-2024-10-24-103546.png) |
| [](https://knowledge.topodrone.com/uploads/images/gallery/2024-10/15-en.png) | [](https://knowledge.topodrone.com/uploads/images/gallery/2024-10/16-en.png) |
The speed and altitude of the drone directly affect the density of the dense laser scanning point cloud.
# Mobile Laser Scanning (MLS) The TOPODRONE LiDAR is designed to perform mobile laser scanning (MLS). This process requires a minimum number of permits to conduct field work. You will not need to obtain a flight permit, avoid airspace restrictions, and minimize the risk of equipment damage in the event of a drone drop. Mobile laser scanning can be done in two ways: using the TOPODRONE backpack or the TOPODRONE mobile car mount. The TOPODRONE backpack allows you to place the TOPODRONE LiDAR together with the external GNSS antenna and power supply on the operator. For more accurate results when using the TOPODRONE backpack it is recommended to use a vehicle such as an ATV, electric scooter or gyro scooter. When scanning with the TOPODRONE backpack, the operator should walk with a steady gait, minimizing vertical and lateral oscillations. The main objective is to maintain a constant speed and minimize vibrations. ##### **The main steps in performing mobile laser scanning:** 1. Preparing and mounting the equipment [on a backpack](https://knowledge.topodrone.com/books/topodrone-100100200/page/topodrone-lidar-to-backpack-installation) or [mobile mount](https://knowledge.topodrone.com/books/topodrone-100100200/page/topodrone-lidar-to-mobile-mount-installation). 2. [Switching on and setting up](https://knowledge.topodrone.com/books/topodrone-100-litehi-res200-ultra/page/setting-up-the-laser-sensor) the TOPODRONE LiDAR and going through [initialization](https://knowledge.topodrone.com/books/topodrone-100100200/page/switching-on-and-initializing-the-topodrone-lidar) (GNSS signal is required). 3. [Performing the calibration maneuver](https://knowledge.topodrone.com/books/topodrone-100100200/page/imu-calibration-pattern) (moving along the infinity or forward-backward trajectory). 4. Passages with TOPODRONE LiDAR along the main survey area. 5. When performing long sessions (more than 30 minutes) it is recommended to perform additional calibration maneuvers every 30 minutes without turning off the TOPODRONE LiDAR to improve the quality of the result. 6. [Data downloading](https://knowledge.topodrone.com/books/topodrone-100100200/page/downloading-data-from-topodrone-lidar) and/or turn off the TOPODRONE LiDAR. ##### **General recommendations for mobile laser scanning:** - Before starting scanning, check the cutoff angles of the TOPODRONE LiDAR as indicated in the corresponding section of the manual. - It is necessary to have a base station file that includes all the operating time of the TOPODRONE LiDAR. - The GNSS signal should be stable and of high quality during the whole scanning trajectory. A high quality GNSS signal is required for data processing in the TOPODRONE Post Processing program. - When using the TopoSLAM filter, the GNSS signal must be of high quality both when calibrating the TOPODRONE LiDAR and when shooting for correct subsequent calibration of offset angles. - When driving with the TOPODRONE LiDAR, try to maintain a stable speed without sudden maneuvers and jerks. The optimum speed for best results is between 10 and 60 km/h. - When using the car mount, it is recommended to use cars with cruise control function to maintain a stable speed. Soft vehicle suspension, cruise control, and smooth roads will help minimize vibrations for best results. - Uneven roads, jerky roads, erratic turns, engine vibrations and stiff suspension, as well as temporary loss of GNSS signal can degrade the quality of the data received. - The duration of scanning sessions is not recommended to be longer than 30 minutes, as long sessions can significantly increase post-processing time and degrade the quality of results. If necessary, it is recommended to divide a large shooting area into sections that can be scanned in 30 minutes. - Scanning should be done on both sides of the subject (front and back) as indicated in the diagram. - To improve the quality of calibration of misalignment angles at the post-processing stage, it is recommended to have vertical objects such as poles, walls, fences, etc. at the survey location ##### **Schematics of mobile laser scanning trajectories:**| [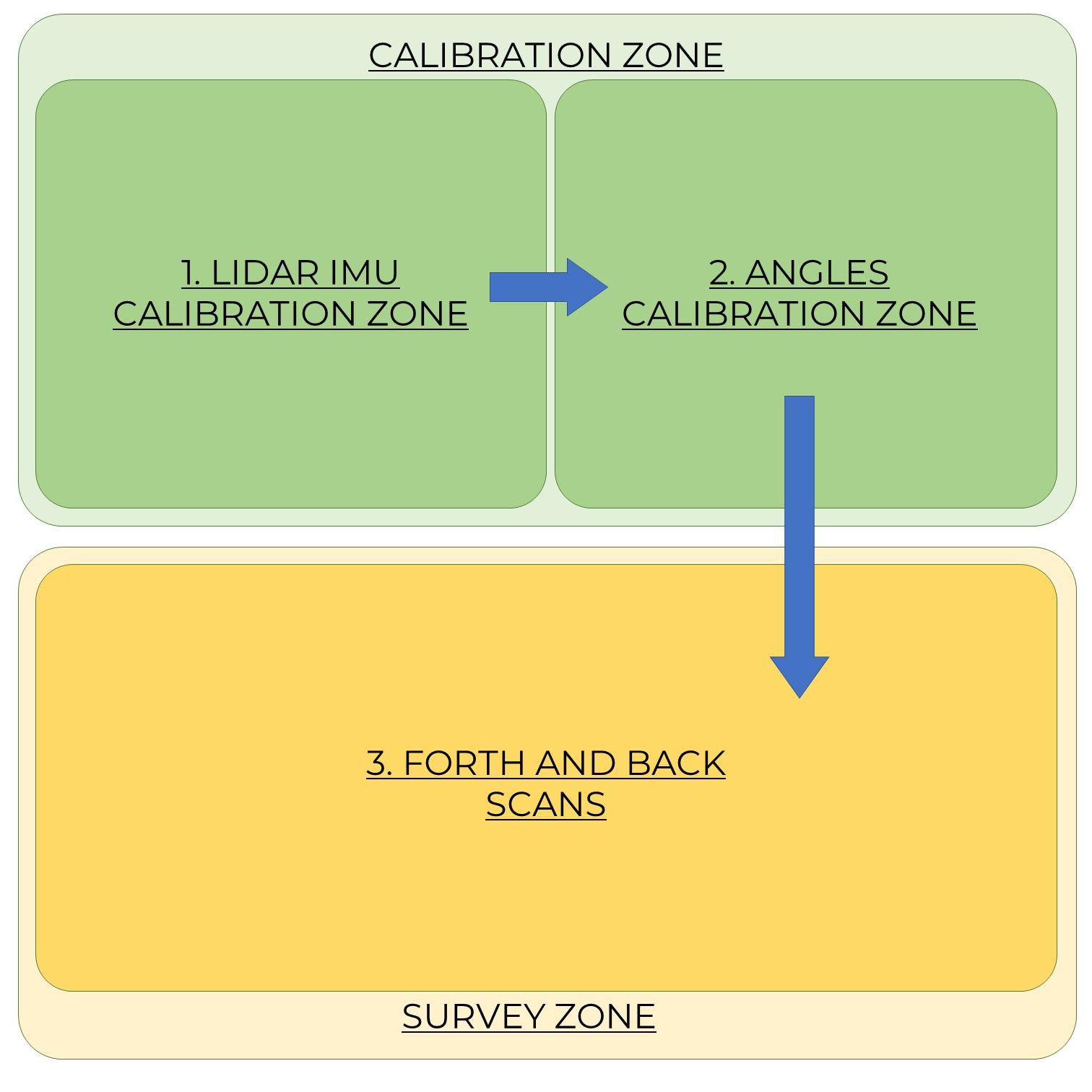](https://knowledge.topodrone.com/uploads/images/gallery/2024-10/1en.JPG) | [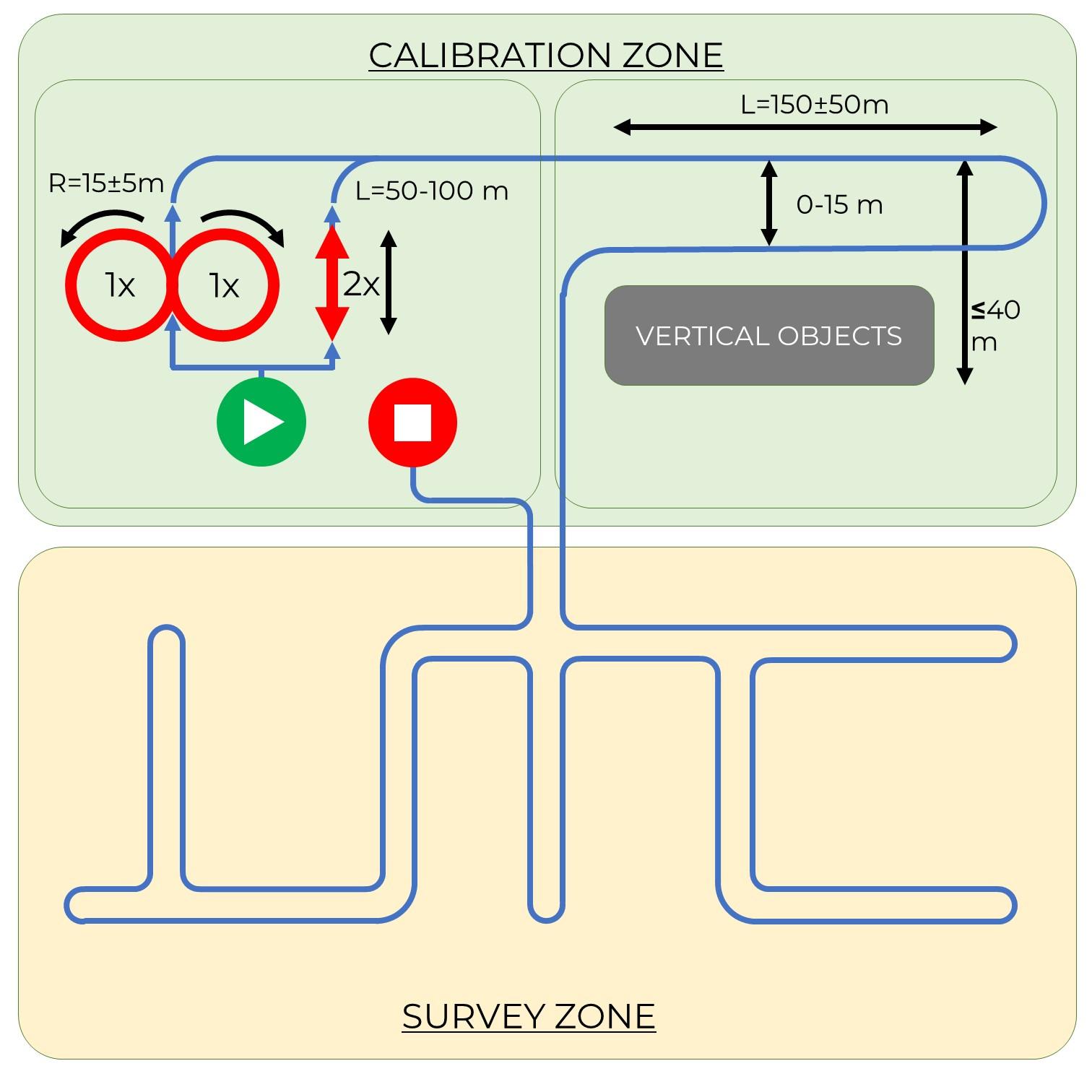](https://knowledge.topodrone.com/uploads/images/gallery/2024-10/2en.JPG) |
| Step 1. General zone descriptions for the TOPODRONE LiDAR | Step 2. General view of the operator's trajectory |
| [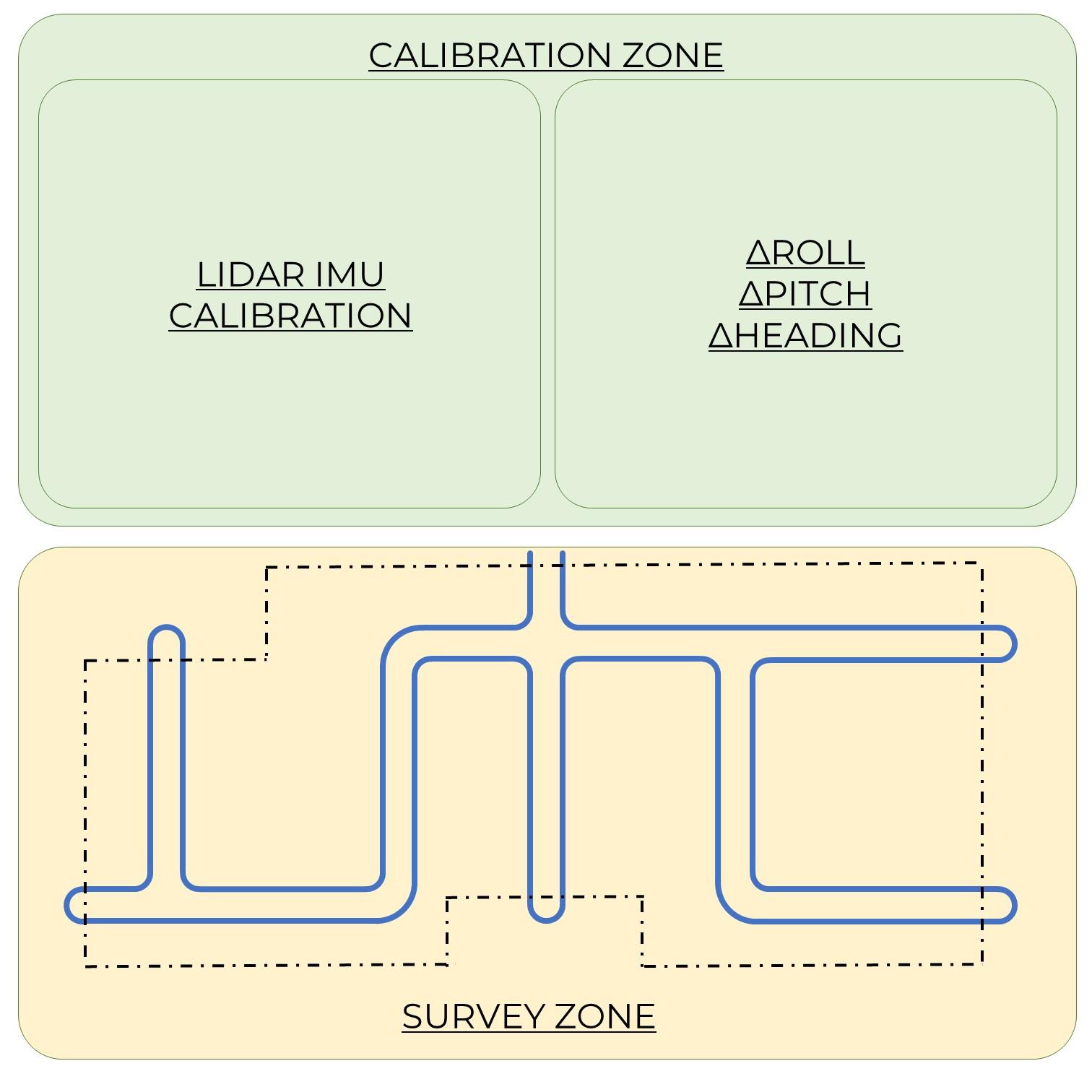](https://knowledge.topodrone.com/uploads/images/gallery/2024-10/3en.JPG) | [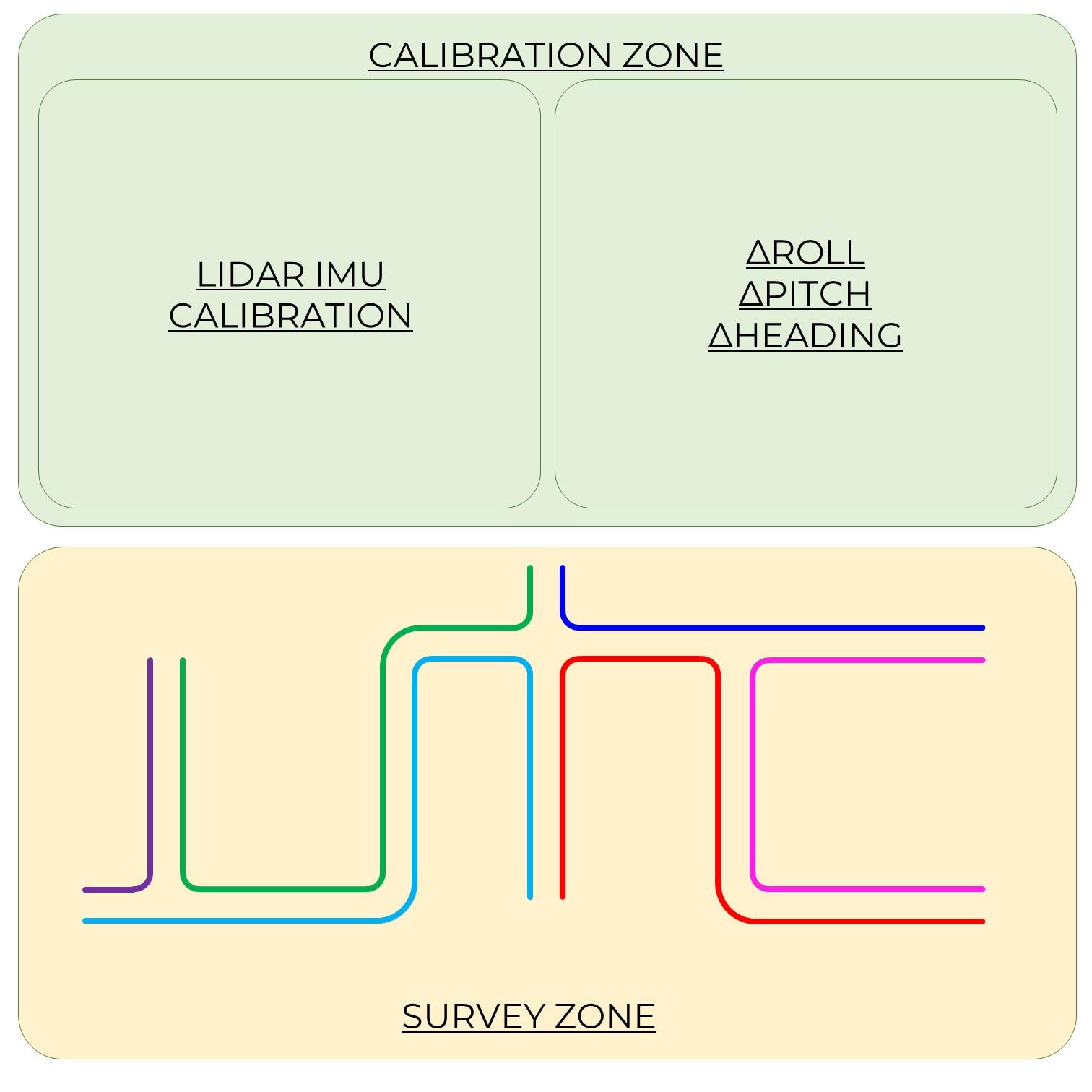](https://knowledge.topodrone.com/uploads/images/gallery/2024-10/4en.JPG) |
| Step 3. Cutting roundings on curves (data post-processing step) | Step 4. Obtaining parallel scans (data post-processing step) |
Data is written to the memory card if there is at least 6GB of free space on the memory card at the time of initialization. If the memory card initially had less than 6GB of free space or it was not available, the data recording starts by default to the internal memory of TOPODRONE LiDAR.
##### **Downloading data from the memory card:** In order to access the ALS or MLS data of TOPODRONE LiDAR recorded on the memory card, it is enough to turn off the power of the device, wait until the LED goes out and then remove the MicroSD card. Connect the memory card to the PC directly or, if necessary, via a card reader. ##### **Downloading data from internal memory:** In order to access the ALS or MLS data of the TOPODRONE LiDAR recorded in the internal memory, it is necessary to download them to an external USB drive using the included USB OTG Type-C adapter or a flash drive with USB Type-C connector. Each initialization of TOPODRONE corresponds to one set of files and, accordingly, one archive with data. After connecting the external flash drive, the TOPODRONE LiDAR starts to form an archive in \*.zip format for each data set. After the archive is formed, it starts to be overwritten to the external flash drive. After the archive rewriting is finished, the TOPODRONE LiDAR compares the checksums on the internal memory and on the external flash drive. If the checksums are the same, the data of the current inclusion is deleted from the internal memory of the TOPODRONE LiDAR.Downloading data from internal memory takes much longer than from a memory card!
1\) Make sure there is enough free space on the external flash drive to load the required data. Depending on the type of LiDAR and operating time, the size of one data set can be from 1 GB to 10 GB. 2\) Turn on the power of the TOPODRONE LiDAR by connecting the power supply through the LEMO 6-Pin connector. If data uploading occurs immediately after performing ALS or MLS, you can skip to step 3. 3\) Connect an external flash drive directly into the USB Type-C connector, or with a USB-OTG adapter (included). 4\) During normal operation, the LED of TOPODRONE LiDAR will change its color to flashing crimson with increasing tone according to the indication table. Flashing crimson indicates that data is being written to the external flash drive. 5\) When the LED of the TOPODRONE LiDAR changes its color to green with a decreasing tone, the data recording is finished. 6\) Turn off the power of the TOPODRONE LiDAR and disconnect the external flash drive.In case of loss of overwritten data on the external USB drive, it is impossible to unload them from the TOPODRONE LiDAR memory.
It is recommended to write off the data from the internal memory of TOPODRONE after 1-5 flights for ALS or MLS.
To reduce the waiting time, you can use the power supply for TOPODRONE through the included power supply unit from the 220V mains without the need to assemble and turn on the drone.
Data upload speed directly depends on the supported speed class and the remaining free space of the external USB flash drive, as well as the TOPODRONE LiDAR run time.
# Ground Control Points (GCP) for TOPODRONE LiDAR To assess the accuracy of the final dense point cloud after data post-processing, it is necessary to perform GCP (Ground Control Points) georeferencing at the fieldwork stage. Under control points we understand the points, which are well interpreted on the dense cloud relative to the relief and previously taken with the help of high-precision GNSS equipment. Control points are not involved in the processing and should not be confused with ground control points. To control the results of the TOPODRONE LIDAR, it is recommended to place control points on any flat dry surface using GNSS measuring equipment mounted on a milestone or tripod using RTK or PPK methods.  GCP georeferencing to assess the accuracy of the dense point cloud of the TOPODRONE LIDAR using the Reach RS2 GNSS receiver.The coordinate system of the control points should be similar to the coordinate system of the base station and the project as a whole.
It is recommended that at least 1 control point be recruited on a single ALS route.
The optimal surfaces for coordinating control points are roads, paths and other similar elements.
It is recommended that the control points for ALS in the forest under a cluster of trees should be set in places where the ground has a clear well-defined surface.
# Frequently Asked Questions 1. **Question: what happens if I run out of free space on the memory card while recording data (ALS or MLS)?** Answer: recording files to the memory card will stop, but recording to internal memory will not start. No further shooting data will be recorded. It is recommended that you check the remaining space on the memory card in advance and clear it if necessary. 2. **Question: Why is it recommended for MLS to use electric transportation: scooter, scooter, etc. for TOPODRONE BackPack?** Answer: to reduce vibrations, wave-like surges (in human gait) and a smoother overall trajectory. 3. **Question: Why is it recommended that a ALS or MLS session not exceed 30 min?** Answer: it has been experimentally determined that when the ALS data recording time exceeds more than 30 min. 4. **Question: Topodrone LiDAR does not download data to the external flash drive after writing data to the internal memory.** Answer: it can be one of the following reasons: a) When connecting an external drive to the USB Type-C connector, make sure that the external drive is properly (all the way) connected to the USB Type-C port of the Topodrone LiDAR. If you are using a USB OTG adapter, make sure it is correct. b) The TOPODRONE LiDAR has not been initialized before being prepared for use for ALS or MLS. For example, due to an unconnected external antenna cable or insufficient GNSS signal quality. Even if GNSS data is lost during ALS or MLS, the data set in the internal memory of the Topodrone LiDAR will still be generated and available for download. c) The data from the Topodrone LiDAR has already been previously overwritten and deleted from the internal memory after a successful transmission. 5. **Question: is it nessesary to perforn an infinity or front-back calibration maneuver every ALS or MLS session?** Answer: yes, calibration maneuver must be performed every time before the main area survey starting. This maneuver is necessary to correctly calibrate the built-in TOPODRONE LiDAR's IMU. 6. **Question: TOPODRONE LiDAR does not initialize, what should I do?** Answer: check the following points a) It is necessary to check the adequacy of the GNSS signal in the place where flights are planned b) Check that the antenna cable is connected and the GNSS antenna is installed correctly c) The laser scanner is in motion Set the laser scanner stationary, turn off the power, wait 20 seconds and turn it on again 7. **Question: The TOPODRONE laser scanner makes a small buzzing sound when it is turned on, is this normal?** Answer: This is a normal sign of the rotation mechanism of the laser scanning units and is not a malfunction 8. **Question: What happens if I remove the external flash drive from the internal memory of the TOPODRONE LiDAR without waiting for the rewriting to finish?** Answer: The last file set archive that was not successfully moved to the end will remain on the internal memory of the laser scanner until the next time the external flash drive is connected.