Performing a calibration maneuver with the TOPODRONE laser scanner
After successful initialization and before starting a route for ALS and MLS, a calibration maneuver must be performed. This maneuver is performed to calibrate the IMU module inside the TOPODRONE laser scanner. Without performing this calibration maneuver before starting a route, the data quality may not be satisfactory.
During the calibration process on the drone it is necessary to move in the plane at the working altitude on the circle once clockwise and once counterclockwise, the sequence does not matter. It is necessary to change the spatial position of the TOPODRONE laser scanner, so the option with rotation around its axis similar to the compass calibration on DJI drones is not suitable.
Performing calibration of the TOPODRONE laser scanner for ALS in automatic mode. There are two ways to perform the figure-eight calibration maneuver on DJI drones: automatic and manual. Whether automatic execution is possible depends on the flight task scheduling software used. UgCS Pro / Expert software allows you to perform the calibration procedure in automatic mode. The possibility of automatic execution depends on the flight planning software used. UgCS Pro / Expert software allows you to perform the calibration procedure in automatic mode.
To perform an automatic figure-of-eight flight in UgCS software, follow the steps below:
- Create a new route by selecting the desired drone profile and setting the necessary parameters for return altitude, actions in case of remote control signal loss, etc.
- Using the Waypoint tool, set the takeoff point, which will be the first waypoint of the route. Set the “height above ground” parameter according to the working altitude.
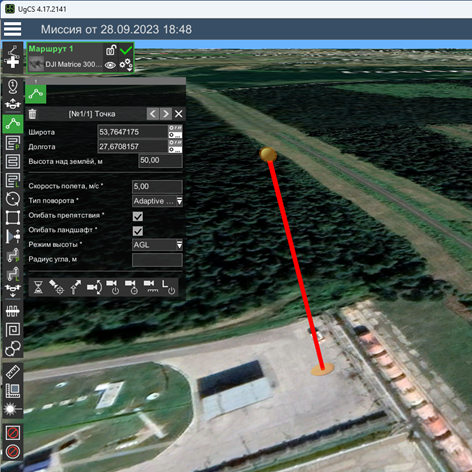
Setting the waypoint before starting the calibration maneuver “figure eight” in UgCS Pro / Expert software.
- Using the Circle Flight tool with a double left mouse click, create a circle flight so that it touches the first “Takeoff” waypoint. It is recommended to use/change the following parameters:
-
- Altitude: 60-120 meters according to the working altitude for your sensor
- Radius: 10-60 meters
- Airspeed: 6-10 meters per second
- Turn Type: Adaptive Bank Turn (this parameter smooths out corners)
- Clockwise traversal: yes (not for the second circle)
- Number of approximating points: 7
- Follow Terrain: no
- Elevation mode: AGL (elevation will be calculated relative to terrain)
- POI - delete (by default POI orientates the drone's front to the center of the circle
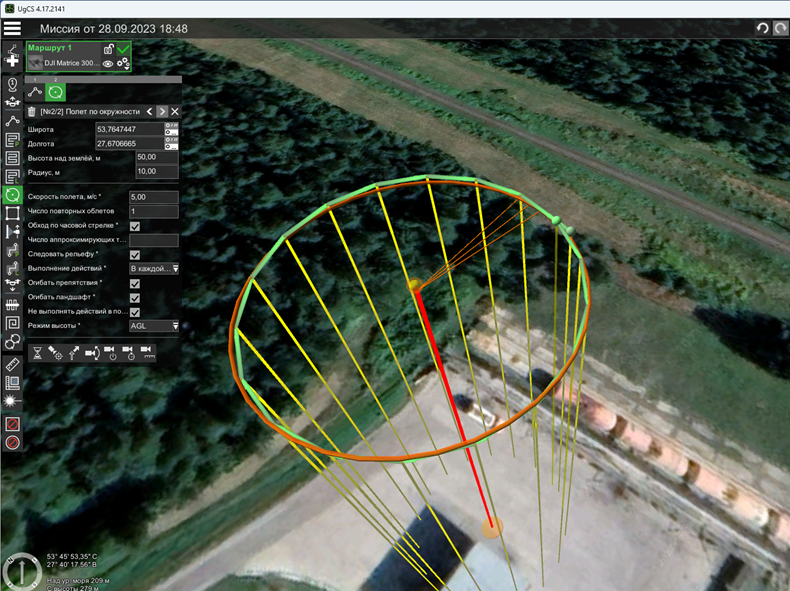
Рис.Setting12.theУстановкаfirstпервогоcircleкругаofкалибровочногоtheманевраcalibration«восьмерка»maneuverв“figureПОeight” in UgCS Pro /Expert.ExpertОбратитеsoftware.вниманиеPleaseнаnoteнеобходимостьtheудаленияnecessityдействияto delete the POI action
ИспользуяDouble-clickинструментon«ПолетtheпоCircleокружности»Flightсtoolпомощьюtoдвойногоcreateщелчкаaлевойsecondмышиcircularсоздайтеflightвторойsoполетthatпоitкругуtouchesтак,theчтобыfirstонwaypointкасалсяandпервойtheпутевойfirstточкиcircle.иItпервойisокружности.recommendedРекомендуетсяtoиспользоватьuseпараметрыtheаналогичныеsameп.parameters as in step. 3,заexceptисключениемforпараметраthe«Обход“Clockwiseпоtraversal”часовойparameter,стрелки»,whichкоторыеshouldдолжныbeбытьdifferentразнымиforдляtheдвухtwoкругов.circles.ОбходClockwiseпоtraversal:часовой стрелки: нетno (даyesдляforвторогоtheкруга)second lap)
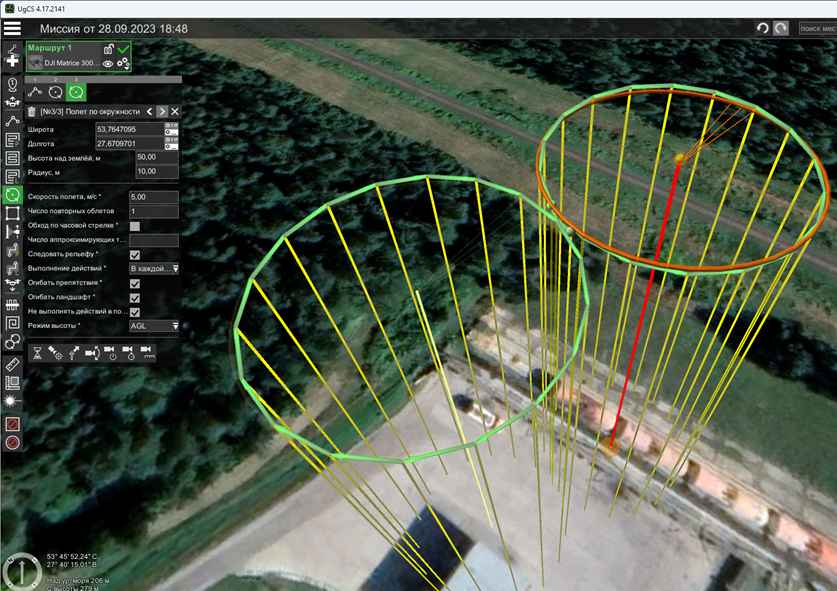
Рис.Setting13.theУстановкаsecondвторогоcircleкругаofкалибровочногоtheманевраcalibration«восьмерка»maneuverв“figureПОeight” in UgCS Pro /Expert.Expert software.ОбратитеNoteвниманиеtheнаneedнеобходимостьtoполетаflyпоinкругамcirclesвinразныхdifferentнаправлениях.directions.
ВыполнениеCalibration калибровки лазерного сканераof TOPODRONE дляlaser ВЛСscanner вfor ручномALS режиме.in manual mode.
ВIn случаеcase невозможностиit выполнитьis калибровочногоimpossible маневраto вperform автоматическомthe режимеcalibration maneuver in automatic mode (отсутствие ПОno UgCS Pro / Expert)Expert software), необходимоit выполнитьis данныйnecessary маневрto вperform ручномthis режимеmaneuver передin началомmanual полетаmode поbefore основномуstarting маршруту.the Дляflight этогоalong выполнитеthe следующиеmain действия:route.
To do this, perform the following actions:
ПодготовьтеPrepareквадрокоптерtheDJIdroneи лазерный сканерand TOPODRONEкlaserэксплуатацииscannerнаforоткрытойoperationместности,accordingсогласноtoинструкции,theприmanual.наличииCheckдостаточногоforуровняaГНССstableсигнала.
GNSS signal.ВключитеTurnдрон,onдождитесьtheпроцедурыdrone,инициализацииwaitквадрокоптераforиthe drone and LiDAR
initialization procedure.ВыполнитеPerformкалибровкуcompassкомпасаcalibrationквадрокоптераbeforeDJIyouпередstartзапускомtheдрона, согласно инструкции к квадрокоптеру.drone.ВыполнениеCompassкалибровкиcalibrationкомпасаmustстрогоbeнеобходимоperformedкаждыйeachразtimeпередbeforeпервымtheполетомfirstнаflightновойinместности.
a new area.ВручнуюManuallyвflyрежимеthe«Р»droneвзлетитеtoнаtheрабочуюworkingвысоту.
altitude in the “P” mode.ДостигнувWhenдрономtheрабочейdroneвысоты,reachesпереключитесьtheнаworkingрежимaltitude,«T»switch to “T” mode - Tripod (приifналичии)available).ВыполнитеManeuverманеврированиеtheприdroneпомощиusingстиковtheуправления.controlДляsticks.выполненияToполетаflyпоinпервомуtheкругуfirst circle (по часовой стрелки) удерживайте левый стик вправоclockwise),аholdправыйtheстикleftвперед.stickТакаяtoкомбинацияtheпозволитrightквадрокоптеруandDJItheописыватьrightкругstickсforward.сохранениемThisвысоты.combinationПослеwillзамыканияallowдрономtheпервогоdroneкругаto circle while maintaining altitude. After the drone completes the first circle, without changing the position of the right stick (forward),неchangeменяяtheположенияpositionправогоofстикаthe left stick to counterclockwise (вперед), измените положение левого стика в соответствии с направлением против часовой стрелки (влево)left).ВInслучаеcaseиспользованияofрежимаusing«T»the “T” - Tripodманеврированиеmode,стикамиyouможноcanосуществлять,maneuverдоводяtheихsticksдоbyкрайнихbringingзначений.themОграничениеtoскоростиextremeиvalues.плавностьSpeedходаlimitationбудутandдостигатьсяsmoothnessзаwillсчетbeособенностейachievedполетаdueвtoрежимеthe«T»flight characteristics of the “T” -Tripod.TripodВmode.случаеIfотсутствияtheрежимаdrone does not have Tripodвmodeквадрокоптереasкакoneодногоofизtheподрежимовflightполетаsubmodes,мыweрекомендуемrecommendвыполнятьperformingманеврированиеstickстикамиmaneuveringмаксимальноasплавноsmoothlyбезasрезкихpossibleдвижений.without sudden movements.- После завершения прохода по второму кругу,
маневркалибровочный маневр выполнен. После завершения процедуры калибровки лазерного сканера TOPODRONE в ручном режиме выполните отправку полетного задания на квадрокоптер и начните выполнение основной части полета. - В процессе выполнения полета по восьмерке можно контролировать радиус поворота дрона при помощи вида «Карта» в приложении на мобильном устройстве, а также визуально, смотря в небо на дрон в полете.
Выполнение калибровочного маневра для МЛС при использовании TOPODRONE BackPack.
- Подготовьте TOPODRONE BackPack и лазерный сканер TOPODRONE к эксплуатации на открытой местности, согласно инструкции, при наличии достаточного уровня ГНСС сигнала.
- Убедитесь, что в радиусе не менее 100 метров находятся любые объекты: здания, холмы, заборы, провода и т.п.
Включите питание лазерного сканера TOPODRONE при помощи входящего в комплект внешнего аккумулятора и кабеля питания. - Дождитесь процедуры инициализации лазерного сканера.
- Наденьте рюкзак на плечи оператора.
- Выполните проход с постоянной скоростью 5-9 км/ч по двум кругам с радиусом 10-15 метров по часовой и против часовой стрелки. Каждый круг должен быть замкнут до начала следующего этапа.
- После завершения прохода по второму кругу, маневр калибровки выполнен. Можно приступать к выполнению основного задания.
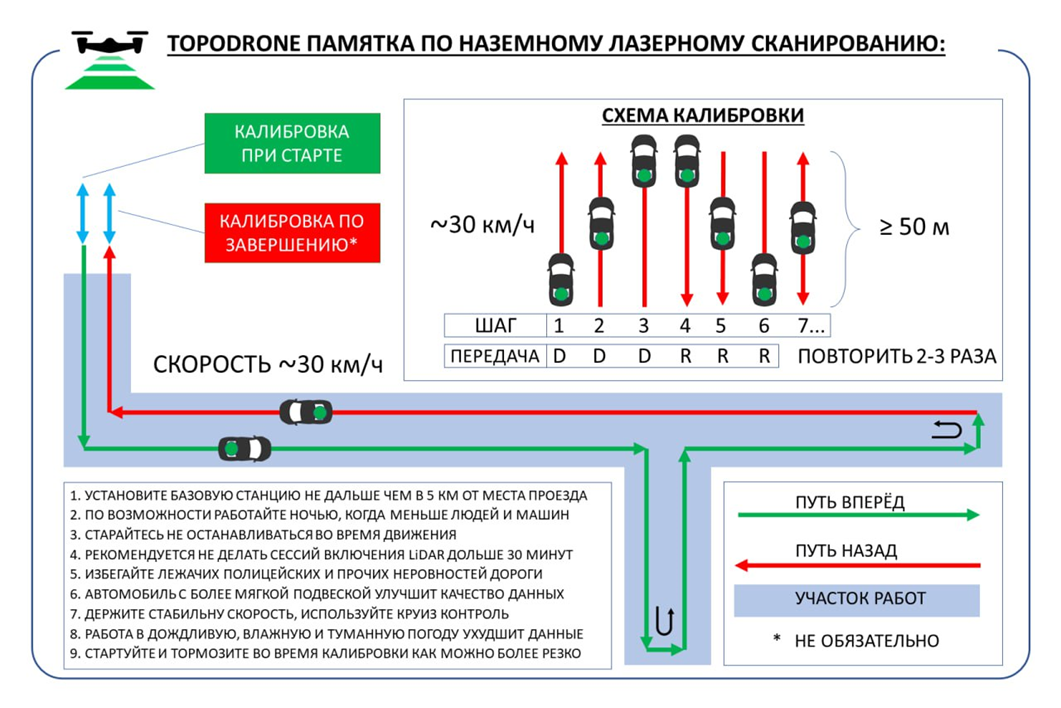
Выполнение калибровочного маневра для МЛС при использовании крепления на автомобиль.
- Подготовьте автомобильное крепление TOPODRONE и лазерный сканер к эксплуатации на открытой местности, согласно инструкции, при наличии достаточного уровня ГНСС сигнала.
- Убедитесь, что в радиусе не менее 100 метров находятся любые объекты: здания, холмы, заборы, провода и т.п.
- Установите автомобильное крепление вместе с лазерным сканером на крышу автомобиля таким образом, чтобы выходящий из сенсора кабель и идущий в корпус TOPODRONE должен смотреть назад по ходу движения.
- Включите питание лазерного сканера TOPODRONE при помощи входящего в комплект внешнего аккумулятора и кабеля питания.
- Дождитесь процедуры инициализации лазерного сканера.
- Выполните проезд с постоянной скоростью 20-30 км/ч вперед на дистанцию 50-100 метров с возвращением в исходную точку задним ходом с той же скоростью. Повторить данный этап 2-3 раза.
- После завершения проездов, маневр калибровки выполнен. Можно приступать к выполнению основного задания.