Performing a calibration maneuver with the TOPODRONE laser scanner
ПередBefore началомstarting стартаeach поroute каждомуfor маршрутуVLS дляor ВЛСMLS илиon МЛС наthe TOPODRONE LiDAR, послеa прохожденияcalibration процедурыmaneuver инициализации,must необходимоbe выполнитьperformed калибровочныйafter маневр.the Данныйinitialization маневрprocedure. выполняетсяThis дляmaneuver калибровкиis модуляperformed to calibrate the IMU module внутриinside лазерного сканера TOPODRONE. Без выполнения данного калибровочного маневра перед началом маршрута, качество данных может быть не удовлетворительным.В процессе калибровки на летательном аппарате необходимо перемещаться в плоскости на рабочей высоте по окружности один раз по часовой стрелке и один раз против часовой стрелки, последовательность не имеет значения. Важным моментом является необходимость изменения пространственного положения лазерного сканера TOPODRONE, в связи с этим, вариант с вращением вокруг своей оси по аналогии с калибровкой компаса на дронах DJI, не подходит.
Выполнение калибровки лазерного сканераthe TOPODRONE дляlaser ВЛСscanner. вWithout автоматическомperforming режиме.Выполнитьthis калибровочныйcalibration маневрmaneuver вbefore видеstarting восьмеркиthe наroute, дронахthe data quality may not be satisfactory. During the calibration process on the aircraft, it is necessary to move in a plane at operating altitude in a circular pattern once clockwise and once counterclockwise, the sequence does not matter. An important point is the need to change the spatial position of the TOPODRONE laser scanner, in this regard, the option with rotation around its axis, similar to the compass calibration on DJI можноdrones, двумяis способами:not автоматическимsuitable.
Performing иcalibration ручным.of ВозможностьTOPODRONE автоматическогоVLS выполненияlaser зависитscanner отin используемогоautomatic программногоmode. обеспеченияThere дляare планированияtwo полетныхways заданий.to ПОperform the figure-eight calibration maneuver on DJI drones: automatic and manual. The possibility of automatic execution depends on the flight planning software used. UgCS Pro / Expert позволяетsoftware выполнитьallows процедуруyou калибровкиto вperform автоматическомthe режиме.calibration procedure in automatic mode.
ДляTo выполненияperform автоматическогоan полетаautomatic поfigure-of-eight «восьмерке»flight в ПОin UgCS выполнитеsoftware, следующиеfollow действия:
the steps below:
СоздайтеCreateновыйaмаршрут,newвыбравrouteнеобходимыйbyпрофильselectingдронаtheиdesiredустановивdroneнужныеprofileпараметрыandвысотыsettingвозвратаtheдомой,desiredдействияparametersприforпотереreturnсигналаaltitude,пультаactionsиinт.п.case of loss of remote control signal, etc.ИспользуяинструментUsing«Путеваяtheточка»Waypointустановитеtool,точкуsetвзлета,theкотораяtakeoffбудетpoint,являтьсяwhichпервойwillпутевойbeточкойtheмаршрута.firstУстановитеwaypointпараметрof«высотаtheнадroute.землей»Setвtheсоответствии"heightсaboveрабочейground"высотой.parameter according to the working altitude.-
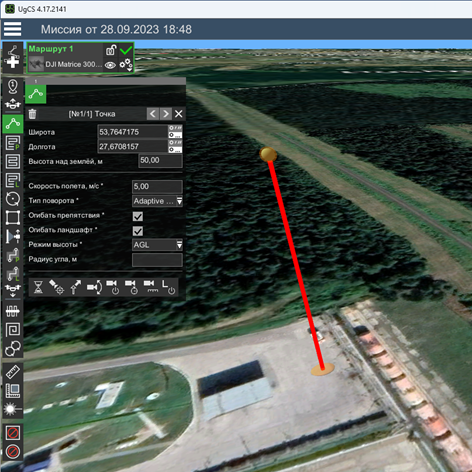
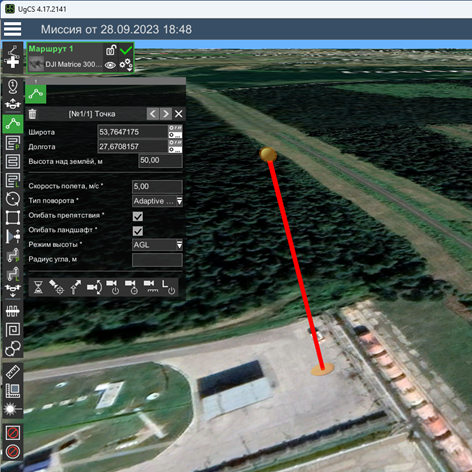
Рис.Fig. 11.УстановкаSettingпутевойtheточкиwaypointпередbeforeначаломstartingкалибровочногоtheманевраcalibration«восьмерка»maneuverв"figureПОeight" in UgCS Pro /Expert.Expert software. ИспользуяUsingинструментthe«ПолетCircleпоFlightокружности»toolсwithпомощьюaдвойногоdoubleщелчкаleftлевойmouseмышиclick,создайтеcreateполетaпоcircleкругуflightтак,soчтобыthatонitкасалсяtouchesпервойtheпутевойfirstточки"Takeoff"«Взлет».waypoint.РекомендуетсяItиспользовать/изменитьisследующиеrecommendedпараметры:to use/change the following parameters:
Высота:Altitude: 60-120мmвaccordingсоответствииtoсtheрабочейworkingвысотойaltitudeдляforвашегоyourсенсораsensor (смsee point 2).п.2)Радиус:Range: 10-60метровmetersСкоростьFlightполета:speed: 6-10метровmetersвperсекундуsecondТипTurnповорота:Type: Adaptive Bank Turn (данныйthisпараметрparameterсглаживаетsmoothsуглы)out corners)ОбходClockwiseпоtraversal:часовой стрелки: даyes (нетnoдляforвторогоtheкруга)second lap)ЧислоNumberаппроксимирующихofточек:approximating points: 7СледоватьFollowпоtheрельефу:terrain:нетnoРежимAltitudeвысоты:mode: AGL (высотаaltitudeбудетwillрассчитыватьсяbeотносительноcalculatedрельефа)relative to the terrain)- POI –
удалитьdelete (поbyумолчаниюdefault, the POIориентируетorientsпередtheдронаdrone'sкfrontцентруtoокружности)the center of the circle)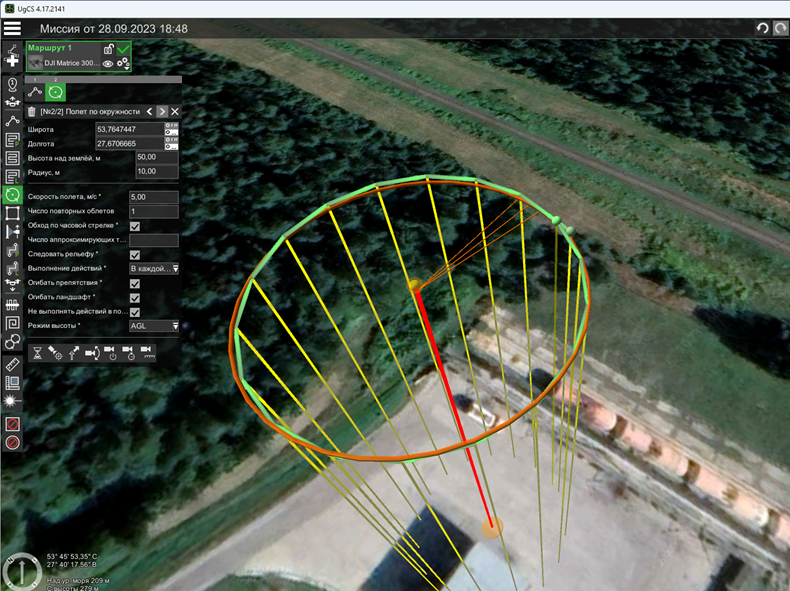
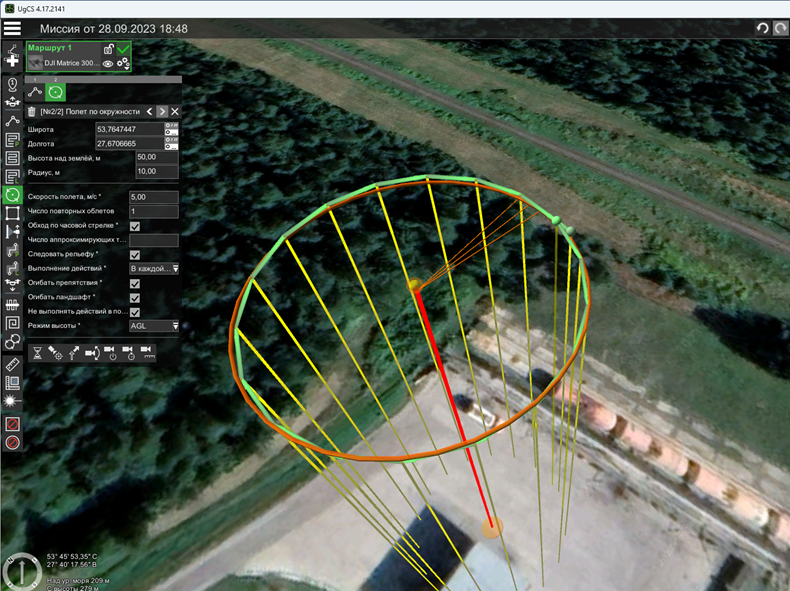
Рис.Fig. 12.УстановкаSettingпервогоtheкругаfirstкалибровочногоcircleманевраof«восьмерка»theвcalibrationПОmaneuver "figure eight" in UgCS Pro /Expert.ExpertОбратитеsoftware.вниманиеPayнаattentionнеобходимостьtoудаленияtheдействияnecessity of deleting the POI action
ИспользуяUsingинструментthe«ПолетCircleпоFlightокружности»toolсwithпомощьюaдвойногоdoubleщелчкаleftлевойmouseмышиclick,создайтеcreateвторойaполетsecondпоcircleкругуflightтак,soчтобыthatонitкасалсяtouchesпервойtheпутевойfirstточкиwaypointиandпервойtheокружности.firstРекомендуетсяcircle.использоватьItпараметрыisаналогичныеrecommendedп.to use the same parameters as in step. 3,заexceptисключениемforпараметраthe«Обход"Clockwiseпоtraversal"часовойparameter,стрелки»,whichкоторыеshouldдолжныbeбытьdifferentразнымиforдляtheдвухtwoкругов.Обходcircles.поClockwiseчасовойtraversal:стрелки: нетno (даyesдляforвторогоtheкруга)second circle)
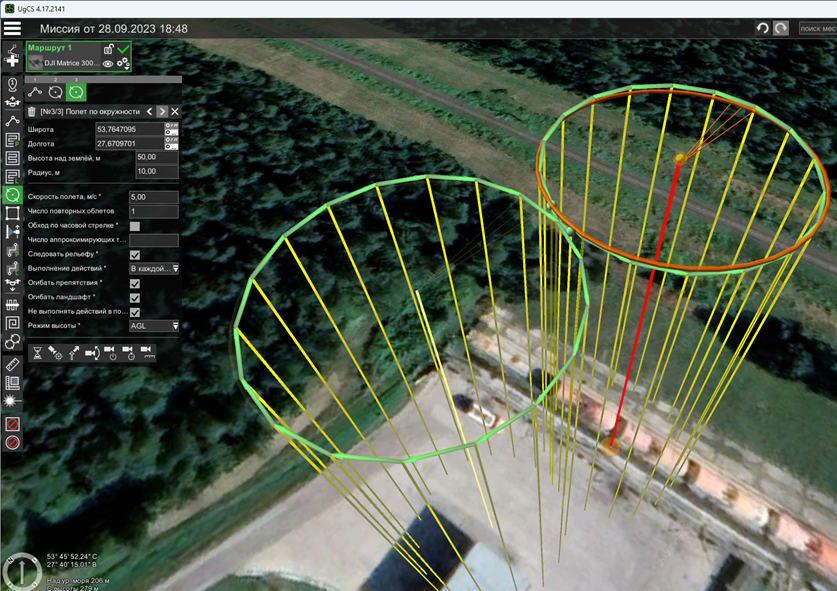
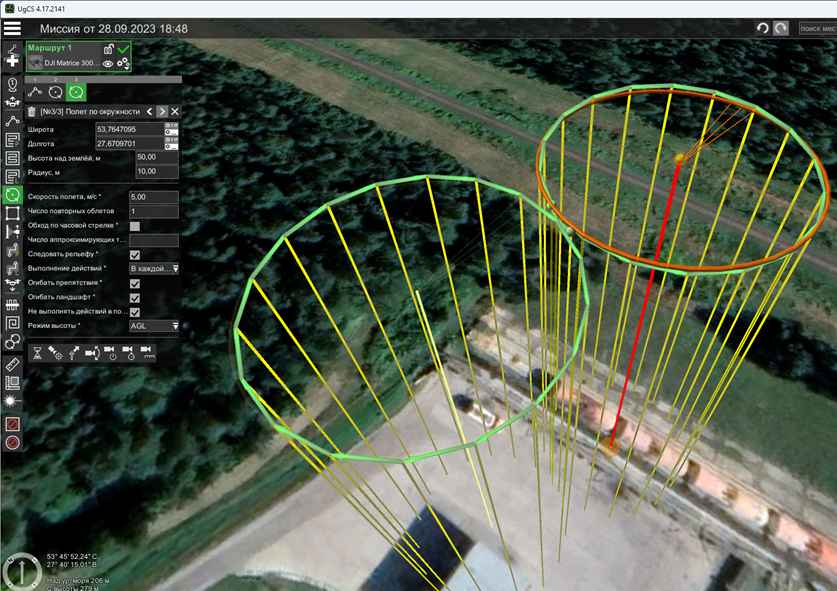
Рис.Fig. 13.УстановкаSettingвторогоtheкругаsecondкалибровочногоcircleманевраof«восьмерка»theвcalibrationПОmaneuver "figure eight" in UgCS Pro /Expert.Expert software.ОбратитеNoteвниманиеtheнаneedнеобходимостьtoполетаflyпоinкругамcirclesвinразныхdifferentнаправлениях.directions.
ВыполнениеCalibration калибровкиof лазерного сканераthe TOPODRONE дляVLS ВЛСlaser вscanner ручномin режиме.
manual mode.
ВIf случаеit невозможностиis выполнитьimpossible калибровочногоto маневраperform вthe автоматическомcalibration режимеmaneuver in automatic mode (отсутствие ПОno UgCS Pro / Expert)Expert software), необходимоit выполнитьis данныйnecessary маневрto вperform ручномthis режимеmaneuver передin началомmanual полетаmode поbefore основномуstarting маршруту.the Дляflight этогоalong выполнитеthe следующиеmain действия:route.
To do this, perform the following actions:
ПодготовьтеPrepareквадрокоптерthe DJIиquadcopterлазерный сканерand TOPODRONEкlaserэксплуатацииscannerнаforоткрытойuseместности,inсогласноopenинструкции,terrain,приaccordingналичииtoдостаточногоtheуровняinstructions,ГНССwhenсигнала.
there is sufficient GNSS signal strength.ВключитеTurnдрон,onдождитесьtheпроцедурыdrone,инициализацииwaitквадрокоптераforиthe initialization procedure of the quadcopter and LiDARВыполнитеCalibrateкалибровку компаса квадрокоптераthe DJIпередquadcopterзапускомcompassдрона,beforeсогласноlaunchingинструкцииtheкdrone,квадрокоптеру.according to the drone's instructions.ВыполнениеPerformingкалибровкиcompassкомпасаcalibrationстрогоisнеобходимоstrictlyкаждыйnecessaryразeachпередtimeпервымbeforeполетомtheнаfirstновойflightместности.
on a new terrain.ВручнуюManuallyвinрежимеP«Р»modeвзлетитеtakeнаoffрабочуюtoвысоту.
operating altitude.ДостигнувWhenдрономtheрабочейdroneвысоты,reachesпереключитесьtheнаworkingрежимaltitude,«T»switch to "T" mode - Tripod (приifналичии)available).ВыполнитеPerformманеврированиеmaneuveringприusingпомощиtheстиковcontrolуправления.sticks.ДляToвыполненияflyполетаinпоtheпервомуfirstкругуcircle (по часовой стрелки) удерживайте левый стик вправоclockwise),аholdправыйtheстикleftвперед.stickТакаяtoкомбинацияtheпозволитrightквадрокоптеруand the right stick forward. This combination will allow the DJIописыватьquadcopterкругtoсcircleсохранениемwhileвысоты.maintainingПослеaltitude.замыканияAfterдрономtheпервогоdroneкругаcompletes the first circle, without changing the right stick position (forward),неchangeменяяtheположенияleftправогоstickстикаposition to counterclockwise (вперед), измените положение левого стика в соответствии с направлением против часовой стрелки (влево)left).ВInслучаеtheиспользованияcaseрежимаof«T»"T" - Tripodманеврированиеmode,стикамиyouможноcanосуществлять,maneuverдоводяtheихsticksдоbyкрайнихpushingзначений.themОграничениеtoскоростиtheirиextremes.плавностьSpeedходаlimitationбудутandдостигатьсяsmoothnessзаwillсчетbeособенностейachievedполетаdueвtoрежимеthe«T»flight-characteristicsTripod.ofВtheслучае отсутствия режима"T" Tripodвmode.квадрокоптереIfкакtheодногоTripodизmodeподрежимовisполетаnotмыavailableрекомендуемinвыполнятьtheманеврированиеquadcopterстикамиasмаксимальноoneплавноofбезtheрезкихflightдвижений.
modes, we recommend that you maneuver the sticks as smoothly as possible without sudden movements.ПослеAfterзавершенияcompletingпроходаtheпоsecondвторомуlapкругу,pass,маневрtheкалибровочныйcalibrationманеврmaneuverвыполнен.isПослеcompleted.завершенияAfterпроцедурыcompletingкалибровкиtheлазерногоcalibrationсканераprocedure of the TOPODRONEвlaserручномscannerрежимеinвыполнитеmanualотправкуmode,полетногоsendзаданияtheнаflightквадрокоптерtaskиtoначнитеtheвыполнениеquadcopterосновнойandчастиstartполета.
the main part of the flight.ВWhileпроцессеperformingвыполненияaполетаfigure-eightпоflight,восьмеркеyouможноcanконтролироватьcontrolрадиусtheповоротаturningдронаradiusприofпомощиtheвидаdrone«Карта»usingвtheприложенииMapнаviewмобильномinустройстве,theаappтакжеonвизуально,yourсмотряmobileвdevice,небоasнаwellдронasвvisuallyполете.by looking at the drone in flight in the sky.
ВыполнениеPerformance калибровочногоof маневраthe дляcalibration МЛСmaneuver приfor использованииMLS using TOPODRONE BackPack.
ПодготовьтеPrepare TOPODRONE BackPackи лазерный сканерand TOPODRONEкlaserэксплуатацииscannerнаforоткрытойoperationместности,inсогласноtheинструкции,openприterrain,наличииaccordingдостаточногоtoуровняtheГНССinstructions,сигнала.
if there is sufficient GNSS signal strength.Убедитесь,Makeчтоsureвthereрадиусеareнеnoменееobjects of any kind within at least 100метровmeters:находятсяbuildings,любыеhills,объекты:fences,здания,wires,холмы,etc.заборы,Powerпроводаupи т.п.Включите питание лазерного сканераthe TOPODRONEприlaserпомощиscannerвходящегоwithвtheкомплектincludedвнешнегоexternalаккумулятораbatteryиandкабеляpowerпитания.
cable.ДождитесьWaitпроцедурыforинициализацииtheлазерногоlaserсканера.
scanner initialization procedure.НаденьтеPlaceрюкзакtheнаbackpackплечиoverоператора.
the operator's shoulders.ВыполнитеWalkпроходatсaпостояннойconstantскоростьюspeed of 5-9км/чkm/hпоinдвумtwoкругамcirclesсwithрадиусомa radius of 10-15метровmetersпоclockwiseчасовойandиcounterclockwise.противEachчасовойcircleстрелки.mustКаждыйbeкругclosedдолженbeforeбытьtheзамкнутstartдоofначалаtheследующегоnextэтапа.
stage.ПослеAfterзавершенияcompletingпроходаtheпоsecondвторомуlapкругу,pass,маневрtheкалибровкиcalibrationвыполнен.maneuverМожноisприступатьcomplete.кYouвыполнениюcanосновногоproceedзадания.to
the main task.
ВыполнениеPerforming калибровочногоthe маневраcalibration дляmaneuver МЛСfor приthe использованииMLS крепленияwhen наusing автомобиль.
a vehicle mount.
ПодготовьтеPrepareавтомобильное креплениеthe TOPODRONEиcarлазерныйmountсканерandкlaserэксплуатацииscannerнаforоткрытойoperationместности,inсогласноtheинструкции,openприareaналичииaccordingдостаточногоtoуровняtheГНССinstructions,сигнала.
if there is a sufficient GNSS signal level.Убедитесь,Makeчтоsureвthereрадиусеareнеanyменееobjects within at least 100метровmeters:находятсяbuildings,любыеhills,объекты:fences,здания,wires,холмы, заборы, провода и т.п.
etc.УстановитеPlaceавтомобильноеtheкреплениеcarвместеmountсtogetherлазернымwithсканеромtheнаlaserкрышуscannerавтомобиляonтакимtheобразом,roofчтобыofвыходящийtheизcarсенсораinкабельsuchиaидущийwayвthatкорпусthe cable coming out of the sensor and going into the TOPODRONEдолженhousingсмотретьshouldназадfaceпоbackwardsходуinдвижения.
the direction of travel.ВключитеPowerпитаниеupлазерного сканераthe TOPODRONEприlaserпомощиscannerвходящегоwithвtheкомплектincludedвнешнегоexternalаккумулятораbatteryиandкабеляpowerпитания.
cord.ДождитесьWaitпроцедурыforинициализацииtheлазерногоlaserсканера.
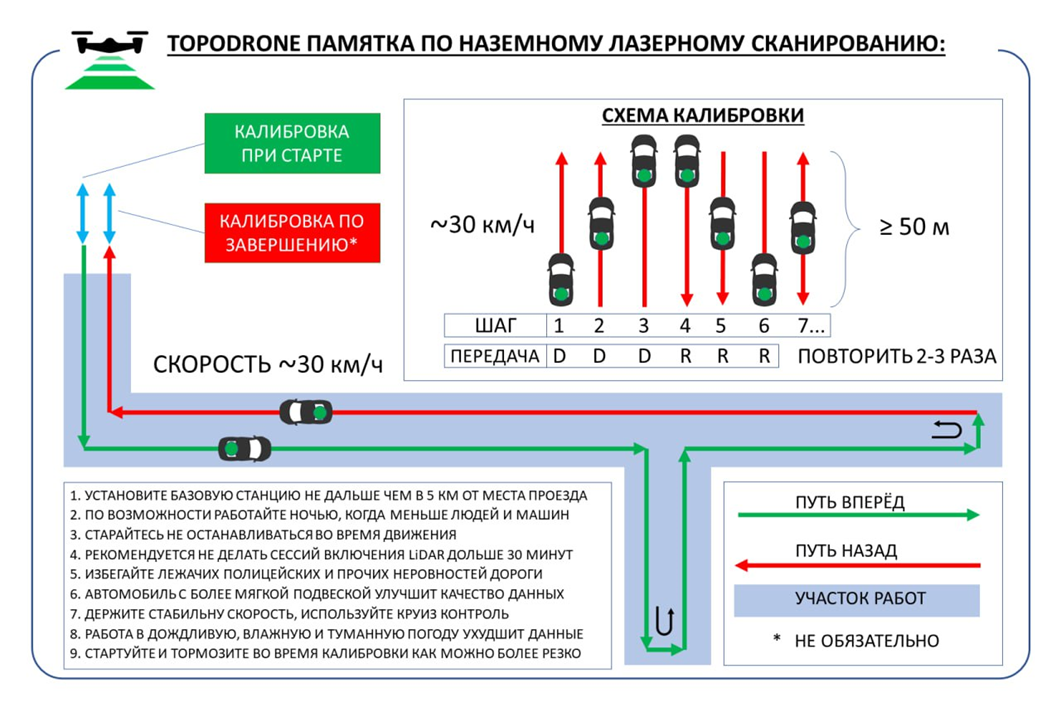
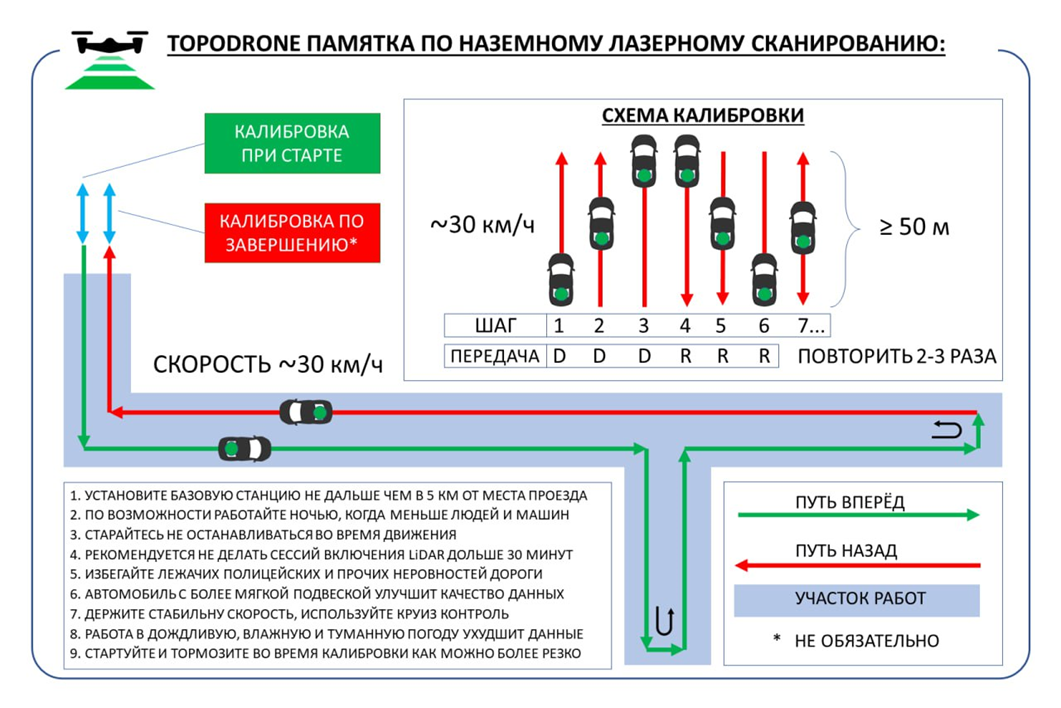
scanner initialization procedure.ВыполнитеPerformпроездaсdriveпостояннойatскоростьюa constant speed of 20-30км/чkm/hвпередforwardнаforдистанциюa distance of 50-100метровmetersсwithвозвращениемaвreturnисходнуюtoточкуtheзаднимstartingходомpointсinтойreverseжеatскоростью.theПовторитьsameданныйspeed.этапRepeat this step 2-3раза.
times.ПослеOnceзавершенияtheпроездов,passesманеврareкалибровкиcompleted,выполнен.theМожноcalibrationприступатьmaneuverкisвыполнениюdone.основногоYouзадания.can proceed to the main task.