Mobile Laser Scanning (MLS)
The TOPODRONE LiDAR is designed to perform mobile laser scanning (MLS). This process requires a minimum number of permits to conduct field work. You will not need to obtain a flight permit, avoid airspace restrictions, and minimize the risk of equipment damage in the event of a drone drop.
Mobile laser scanning can be done in two ways: using the TOPODRONE backpack or the TOPODRONE mobile car mount. The TOPODRONE backpack allows you to place the TOPODRONE LiDAR together with the external GNSS antenna and power supply on the operator. For more accurate results when using the TOPODRONE backpack it is recommended to use a vehicle such as an ATV, electric scooter or gyro scooter.
When scanning with the TOPODRONE backpack, the operator should walk with a steady gait, minimizing vertical and lateral oscillations. The main objective is to maintain a constant speed and minimize vibrations.
The main steps in performing mobile laser scanning:
- Preparing and mounting the equipment on a backpack or mobile mount.
- Switching on and setting up the TOPODRONE LiDAR and going through initialization (GNSS signal is required).
- Performing the calibration maneuver (moving along the infinity or forward-backward trajectory).
- Passages with TOPODRONE LiDAR along the main survey area.
- When performing long sessions (more than 30 minutes) it is recommended to perform additional calibration maneuvers every 30 minutes without turning off the TOPODRONE LiDAR to improve the quality of the result.
- Data downloading and/or turn off the TOPODRONE LiDAR.
General recommendations for mobile laser scanning:
- Before starting scanning, check the cutoff angles of the TOPODRONE LiDAR as indicated in the corresponding section of the manual.
- It is necessary to have a base station file that includes all the operating time of the TOPODRONE LiDAR.
- The GNSS signal should be stable and of high quality during the whole scanning trajectory. A high quality GNSS signal is required for data processing in the TOPODRONE Post Processing program.
- When using the TopoSLAM filter, the GNSS signal must be of high quality both when calibrating the TOPODRONE LiDAR and when shooting for correct subsequent calibration of offset angles.
- When driving with the TOPODRONE LiDAR, try to maintain a stable speed without sudden maneuvers and jerks. The optimum speed for best results is between 10 and 60 km/h.
- When using the car mount, it is recommended to use cars with cruise control function to maintain a stable speed. Soft vehicle suspension, cruise control, and smooth roads will help minimize vibrations for best results.
- Uneven roads, jerky roads, erratic turns, engine vibrations and stiff suspension, as well as temporary loss of GNSS signal can degrade the quality of the data received.
-
The duration of scanning sessions is not recommended to be longer than 30 minutes, as long sessions can significantly increase post-processing time and degrade the quality of results. If necessary, it is recommended to divide a large shooting area into sections that can be scanned in 30 minutes.
-
Scanning should be done on both sides of the subject (front and back) as indicated in the diagram.
- To improve the quality of calibration of misalignment angles at the post-processing stage, it is recommended to have vertical objects such as poles, walls, fences, etc. at the survey location
Schematics of mobile laser scanning trajectories:
|
|
|
|
Step 1. General zone descriptions for the TOPODRONE LiDAR |
Step 2. General view of the operator's trajectory |
|
|
|
|
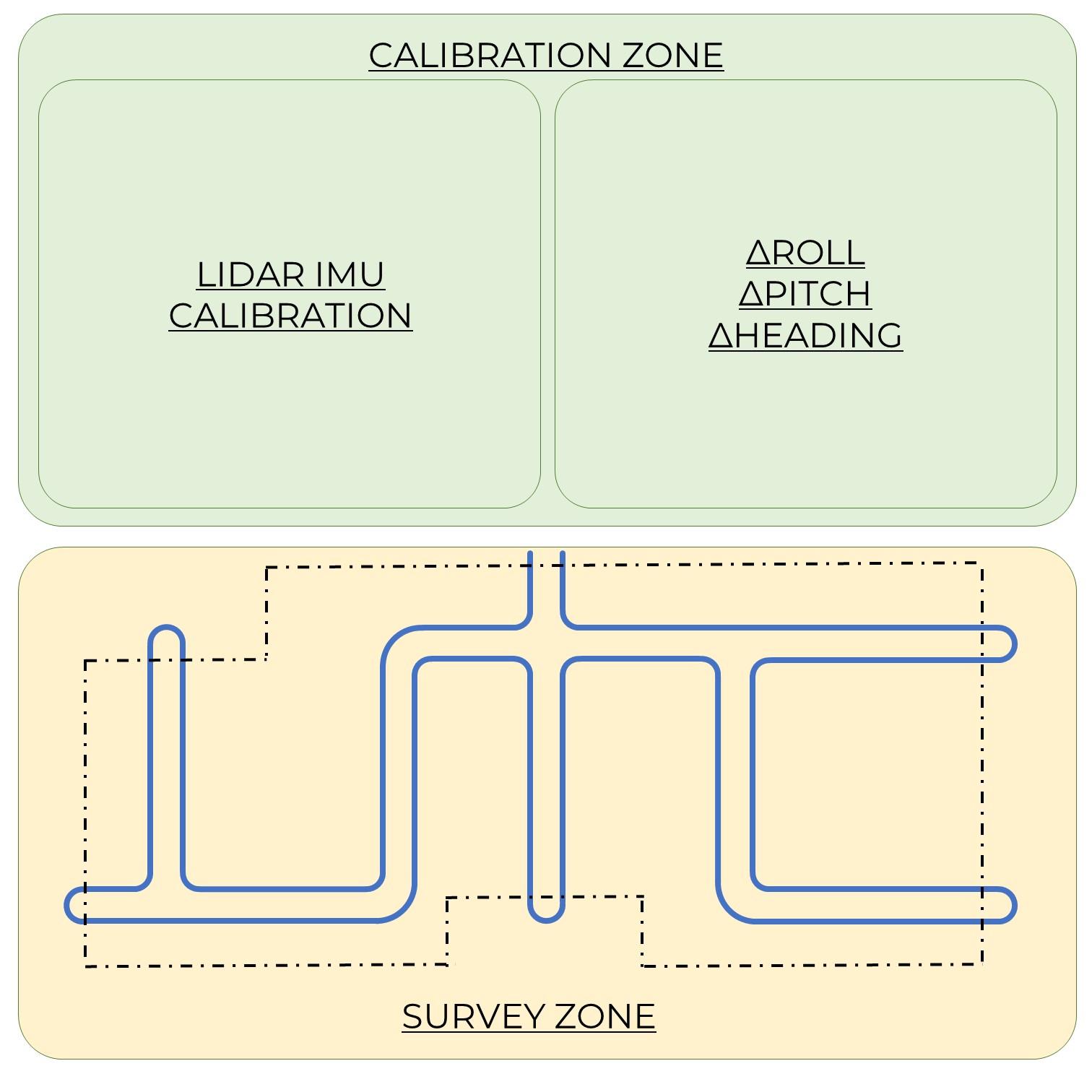
Step 3. Cutting roundings on curves (data post-processing step) |
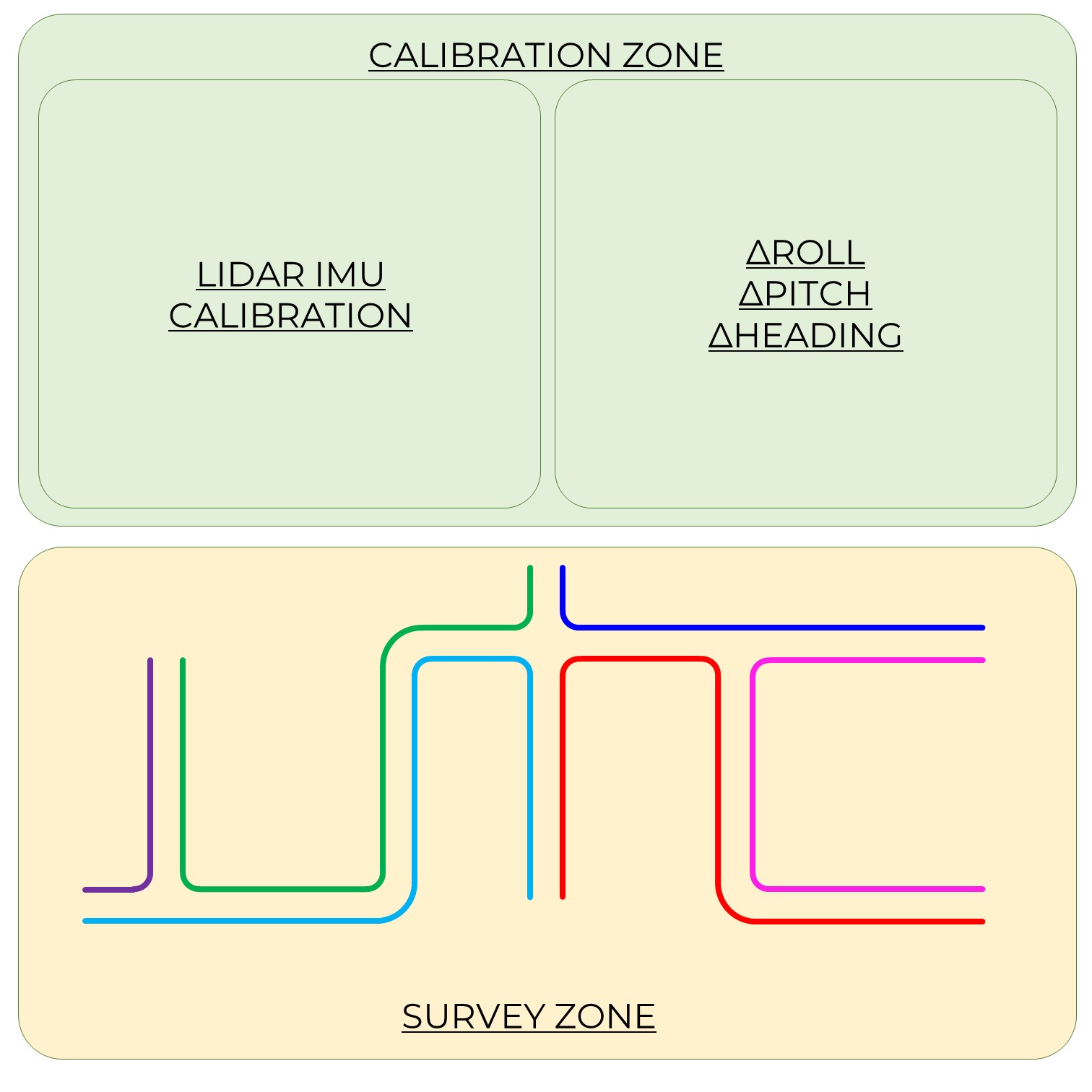
Step 4. Obtaining parallel scans (data post-processing step) |
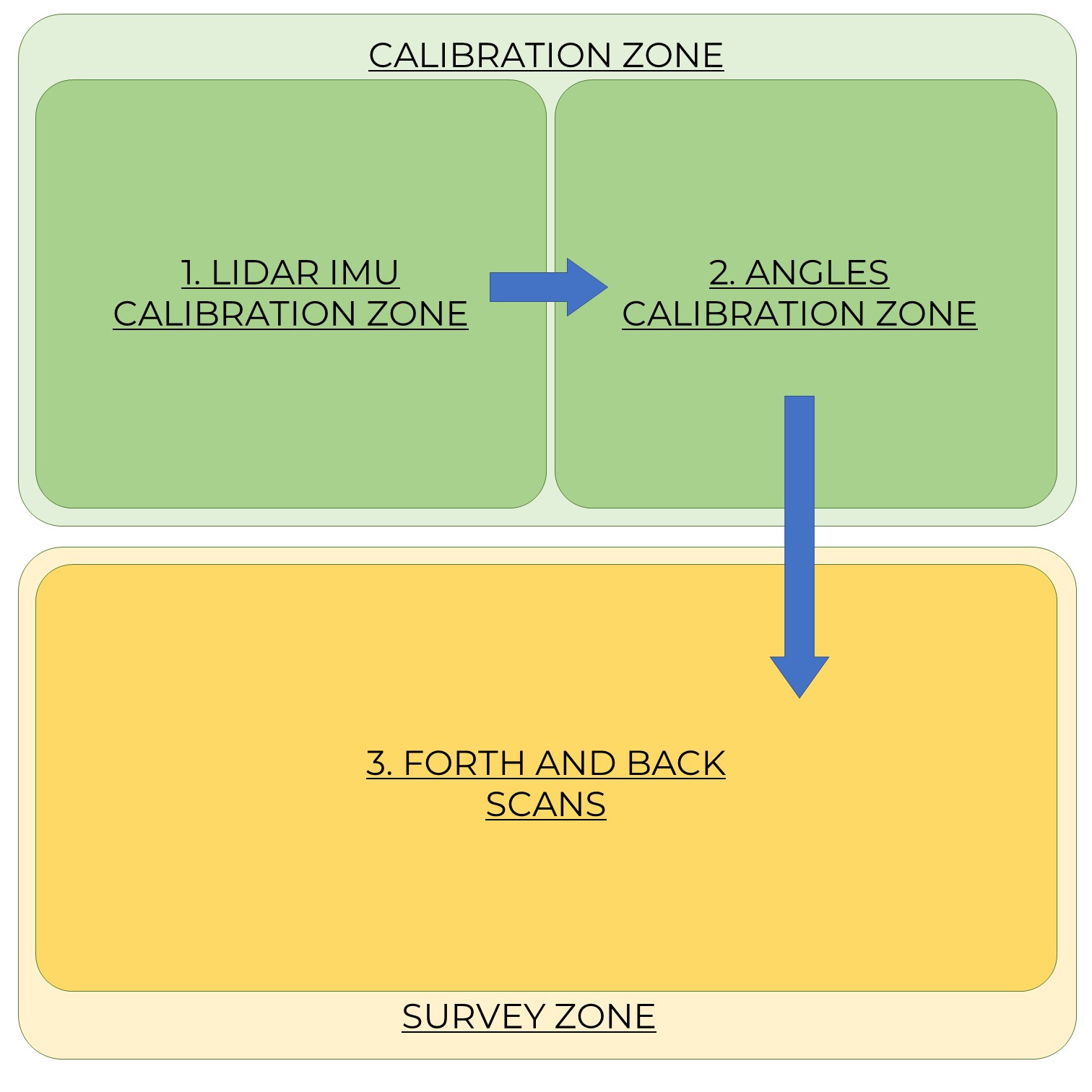
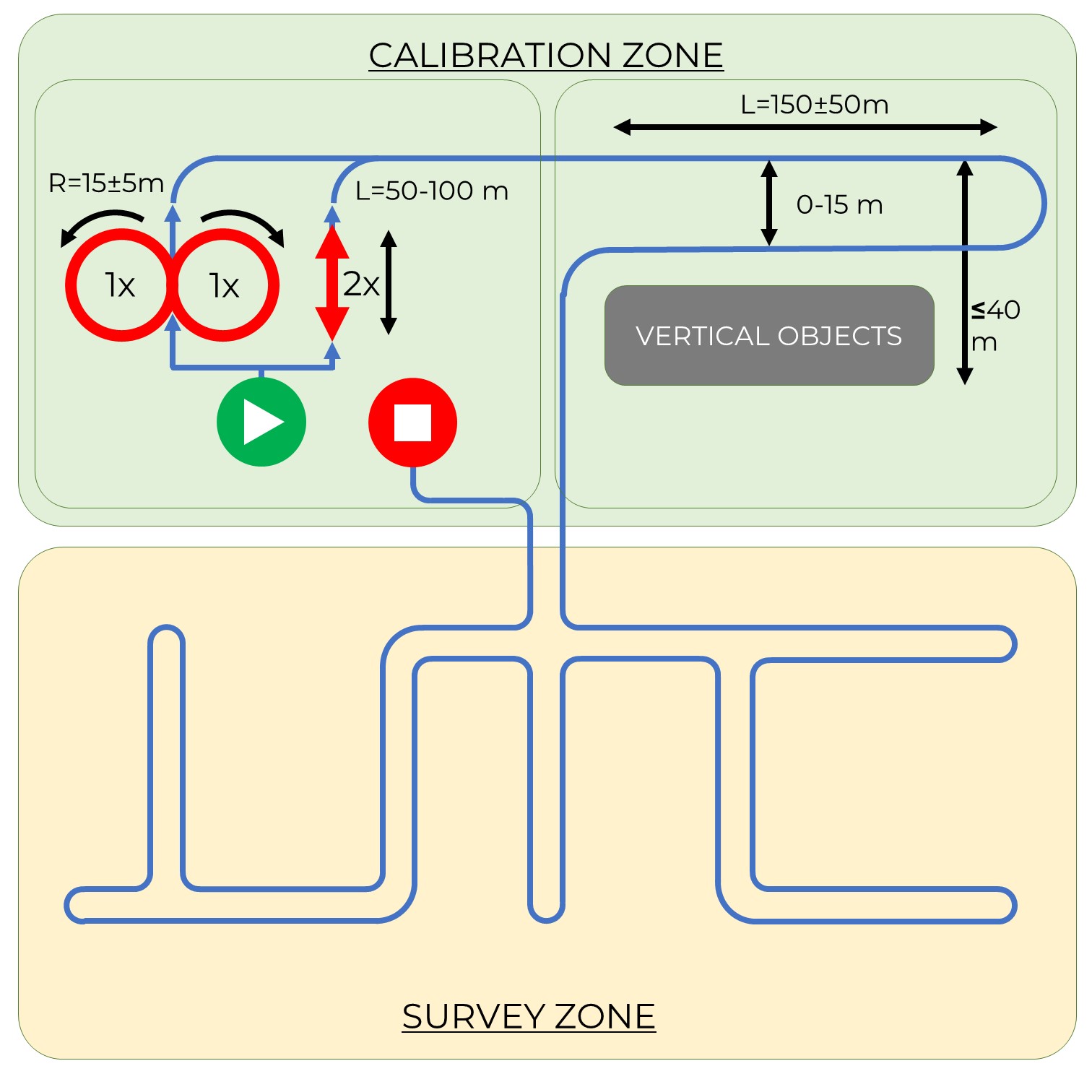
Mobile laser scanning is conditionally divided into 2 stages, in the first stage we perform calibration of TOPODRONE Lidar, and in the second stage we perform scanning of the object. Drive at a constant speed of 20-30 km/h forward for a distance of 50-100 meters with return to the starting point in reverse at the same speed. Repeat this step 2-4 times. This step is necessary for precise positioning of the TOPODRONE Lidar in space. After completing the passes, the calibration is done, you can start the main task. When performing the main stage of scanning it is necessary to provide at least 2 passes on the site of work, and the overlap between the passes should be no more than 15 meters (the larger the overlap the easier it will be for the program to calculate the angles of misalignment).
The technology of calculating the angles of misalignment of scans in post-processing provides for the presence of vertical objects, so if there are no vertical objects on the scanning area or their number is minimal, it is necessary to supplement the work with vertical objects to calculate the angles of misalignment.
It is recommended to perform scanning in forward and reverse direction so that the objects were scanned from both sides (front and back), if technically it is impossible to do so, it is allowed to scan in 2 passes in one direction, but it should be taken into account that in this case the density of coverage of the object may not be complete.
Always make passes with a small margin, because in post-processing the turns will be cut off.