LiDAR Cloud Generation
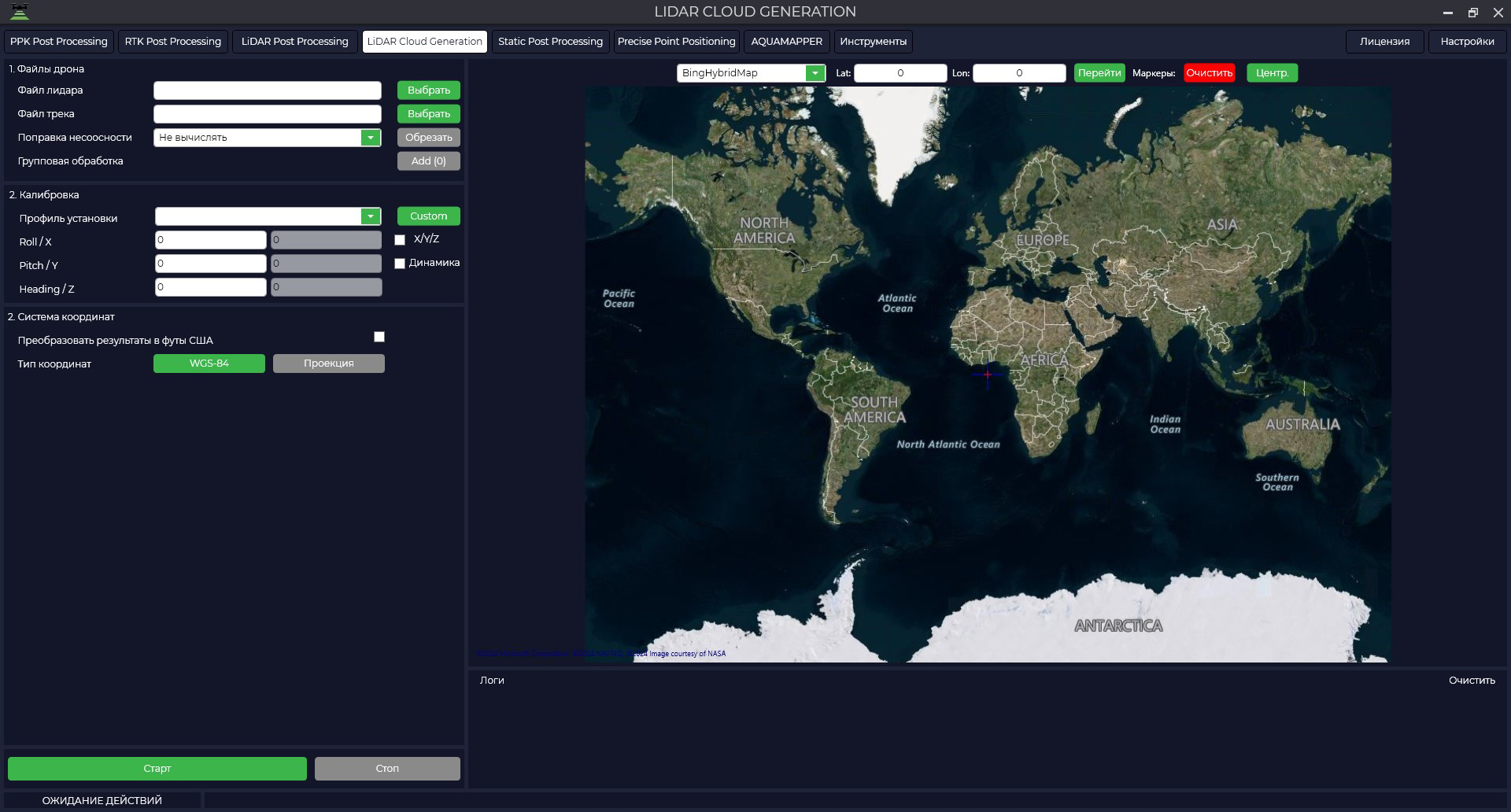
ДляTo запускаstart данногоthis модуляmodule, необходимоyou перейтиneed наto вкладкуgo to the LiDAR Cloud Generation.Generation tab.
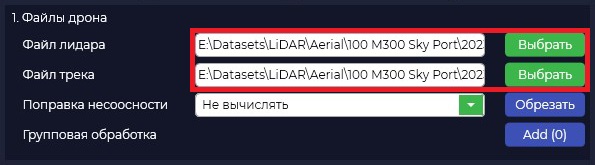
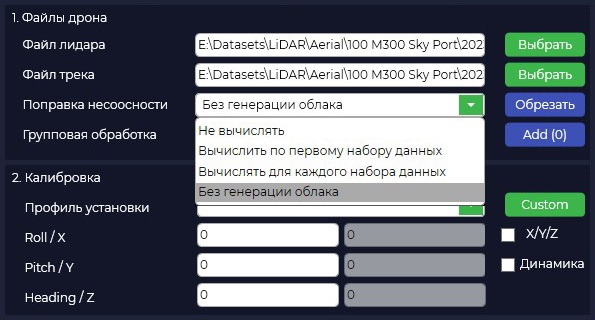
УкажитеSpecify путьthe кpath даннымto сthe лазерногоdata сканераfrom the laser scanner *.pcap вin окнеthe «Файлы"Drone дрона»Files" вwindow полеin «Файлthe лидара»,"Lidar вFile" полеfield, «Файлin трека»the укажите"Track файлFile" траекторииfield specify the track_*.pos,pos которыйtrajectory получилиfile, вwhich результатеwas обработкиobtained вas модулеa result of processing in the LiDAR Post Processing.Processing Поmodule. умолчаниюBy данныеdefault, сохранятсяthe вdata исходнуюwill папку.be saved to the source folder.
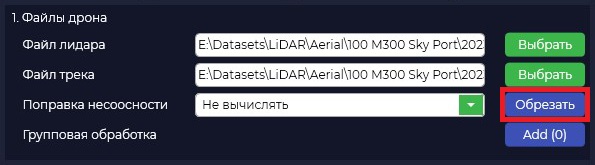
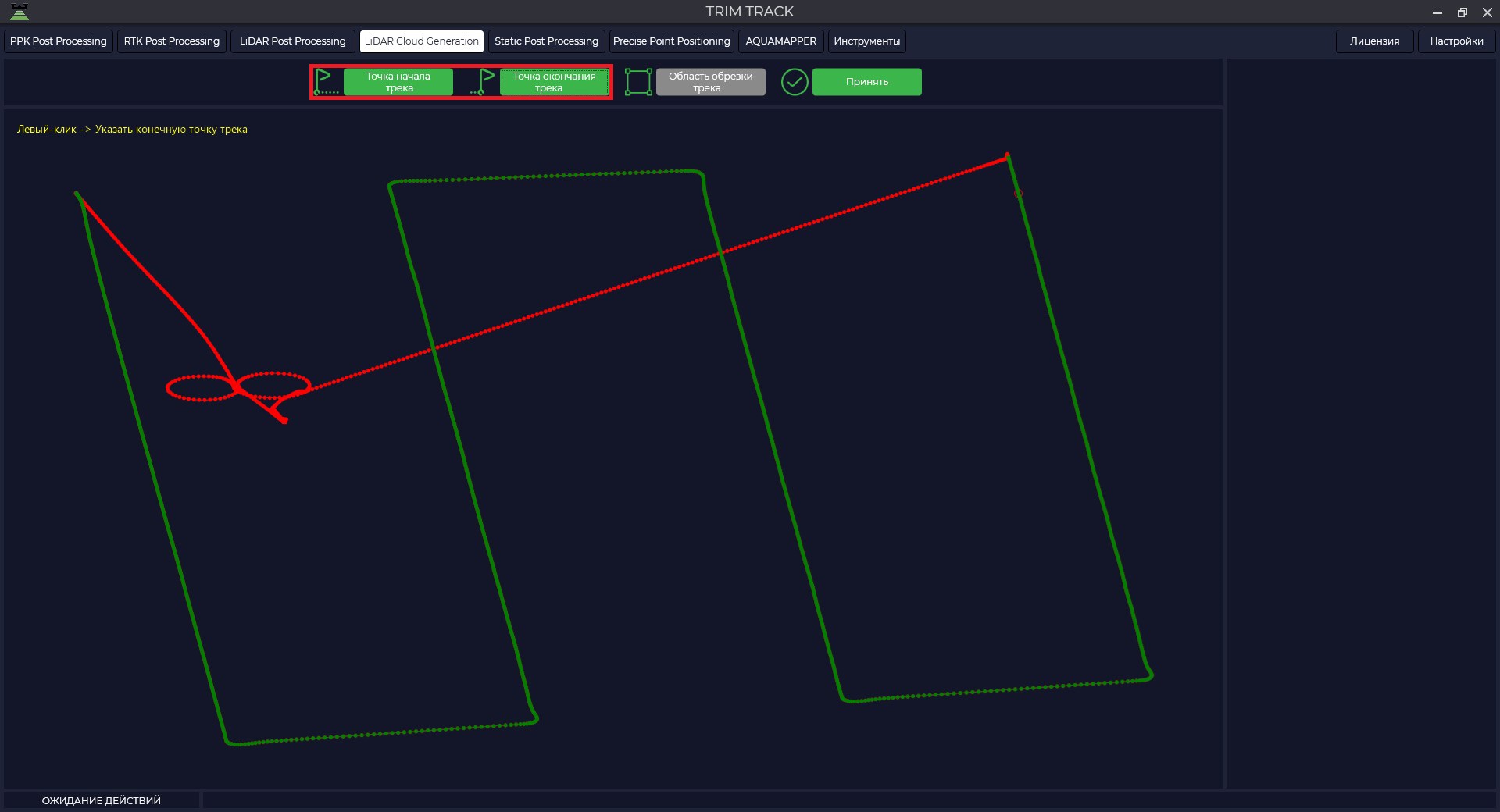
НажмитеClick кнопкуthe «Обрезать»"Trim" иbutton укажитеand точкуspecify началаthe иstart окончанияand траекторииend дляpoint генерацииof облакаthe точек.trajectory to generate a point cloud.
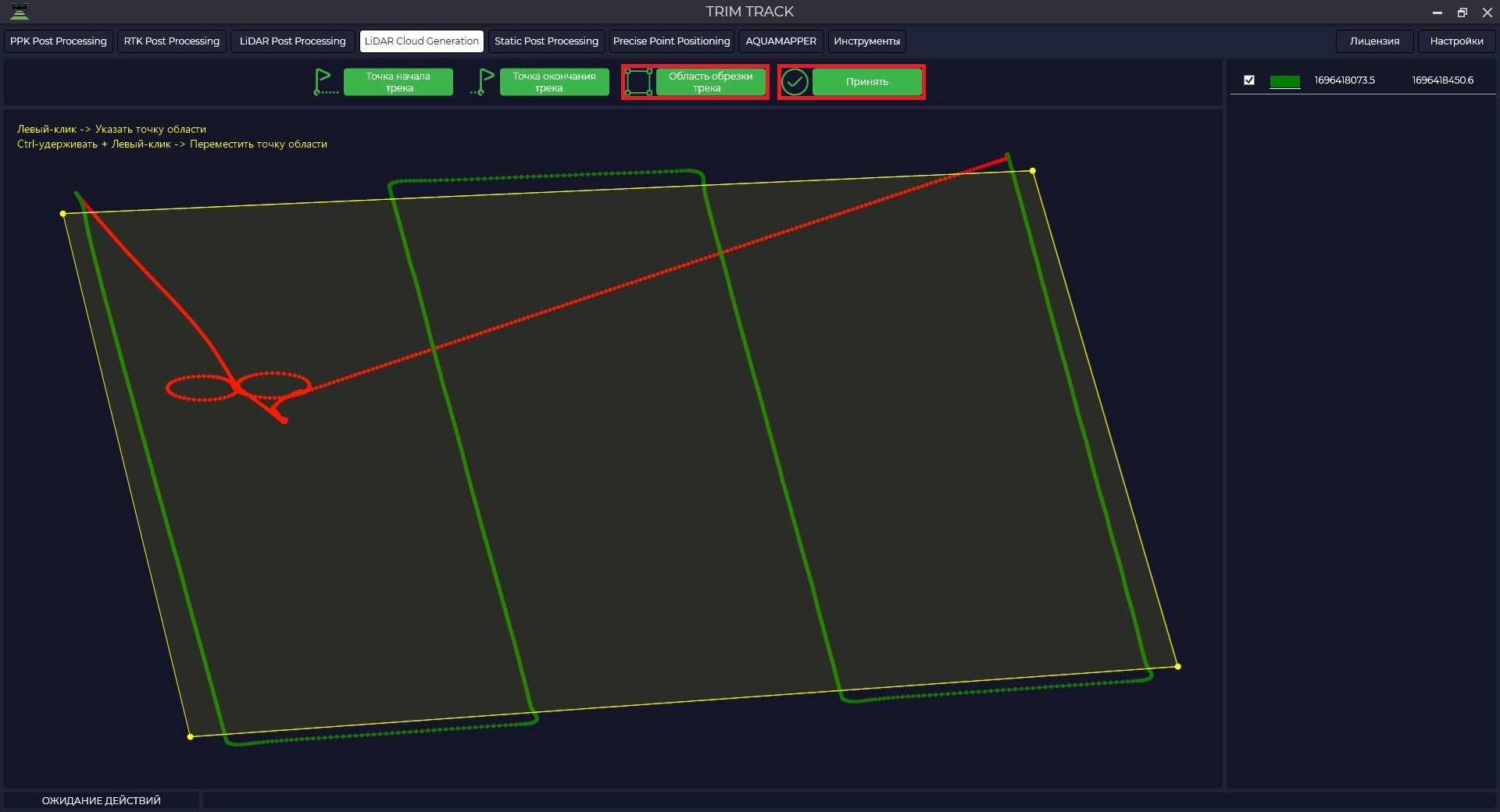
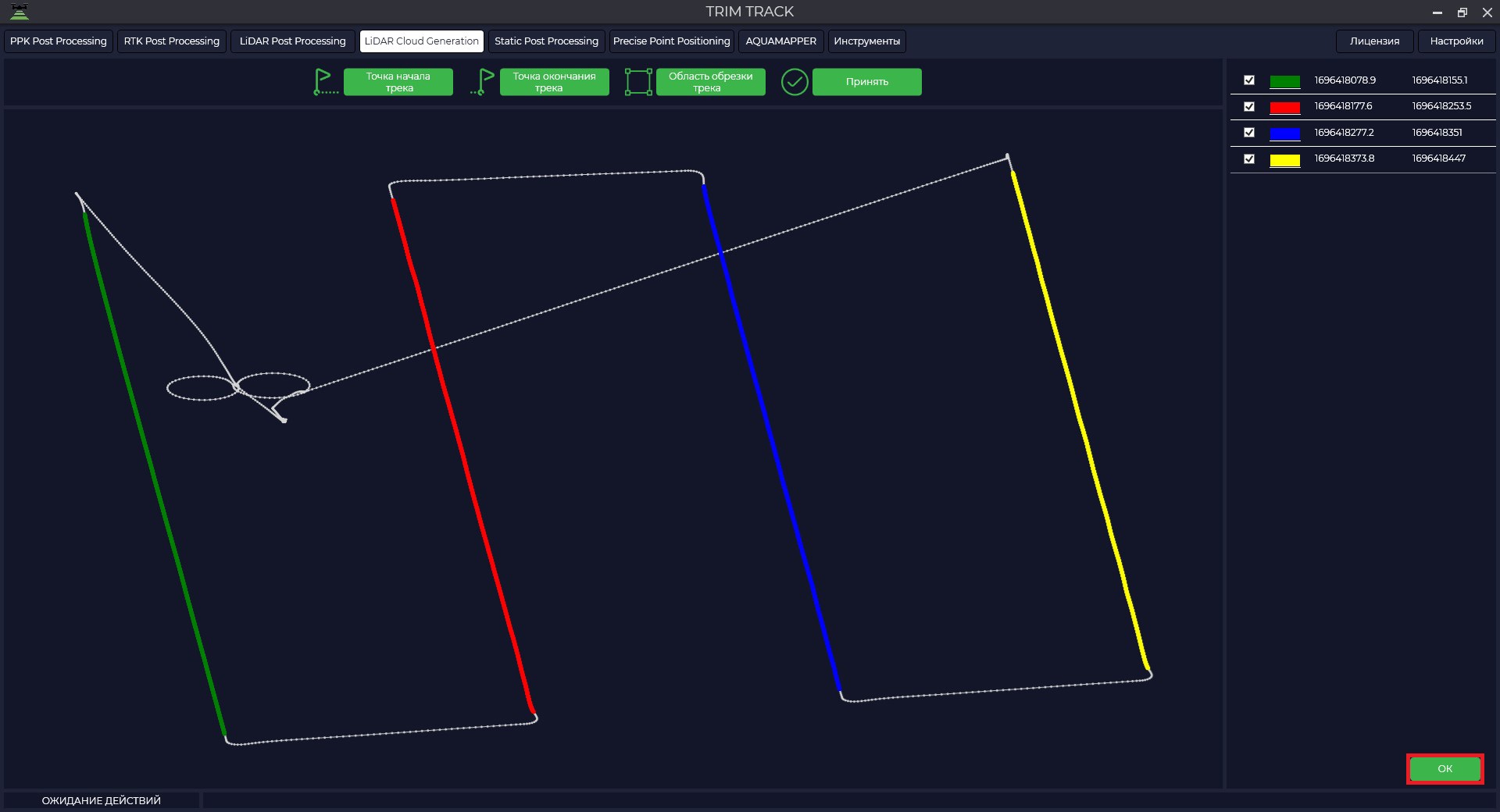
ПриIf необходимостиnecessary, можноyou разделитьcan траекториюdivide наthe отдельныеtrajectory галсыinto нажавseparate наtransects кнопкуby «Областьclicking обрезкиon траектории»the "Trajectory trim area" button Click "Accept" to trim the unselected part of the trajectory and "OK" to save.Нажмите «Принять» для обрезки не выделенной части траектории и «ОК» для сохранения.
Для
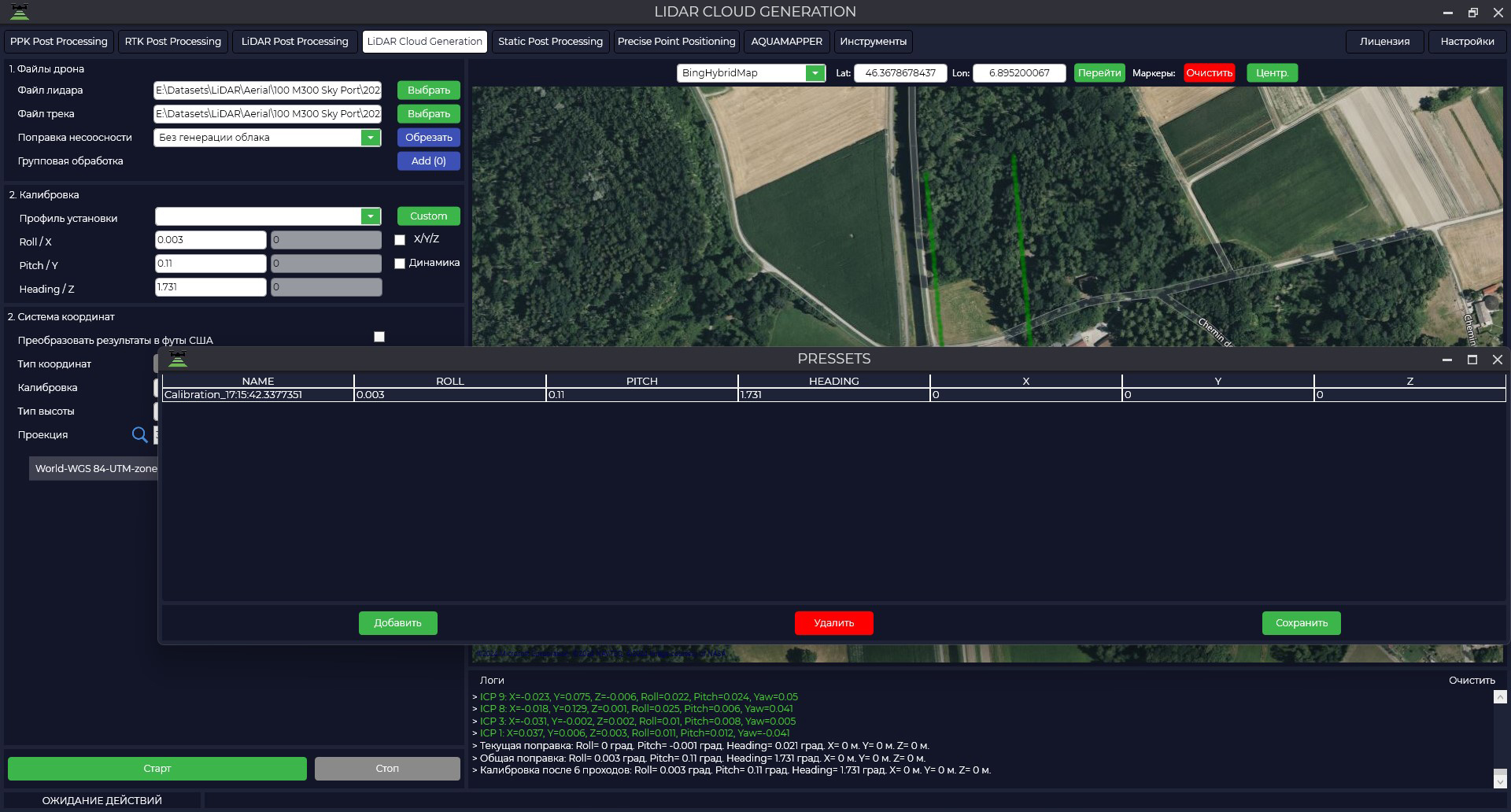
Roll, калибровочныхPitch угловand Heading calibration angles should be set to "0", in case you have already calculated the angles and they remain stable, you can select your preset from the drop-down list. X/Y/Z should be used to correct the position of the clouds in the X, Y and Z axes in case of discrepancies between passes. Dynamics is the dynamic correction of Angle, Roll, Pitch иand Heading необходимоacross указатьpasses, значениеi.e. «0»,each вindividual случаеcloud еслиsegment уwill васhave углыits ужеown вычисленыangle иvalues. остаютсяIf стабильными,this можноfunction выбратьis вашused, пресетthe изentire выпадающегоcloud списка.must X/Y/Zbe необходимоused.

In корректировкиthe положения"Misalignment облаковcorrection" поfield, осямyou X,must Yselect иa Zvalue вto случаеcalculate расхожденияthe междуangles. проходами.It Динамикаis -optimal этоto динамическаяselect коррекцияat углов,least two tack with a fixed trajectory with the presence of vertical objects.
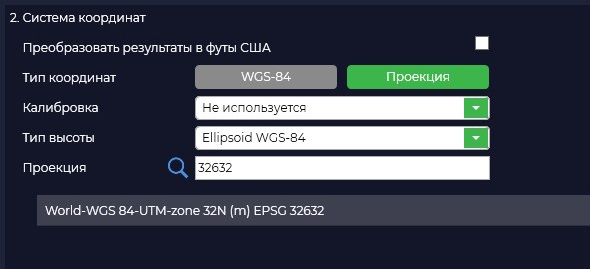
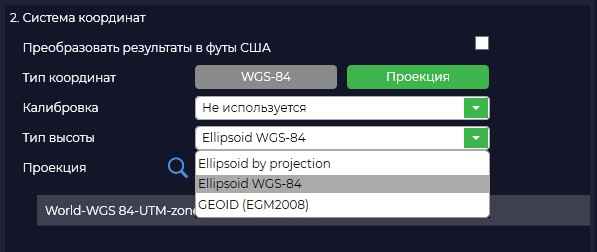
To select a coordinate system you should press the "Coordinate system" button and choose your coordinate system from the proposed list or enter the name of the coordinate system in the search line. If your coordinate system is not in the list, you can add it to the TOPODRONE Post Processing program.
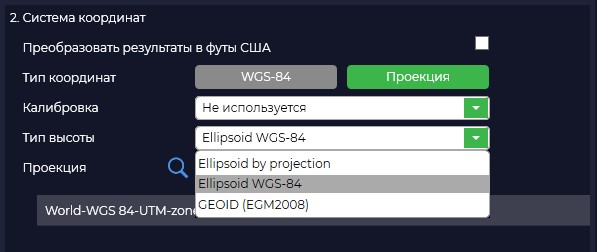
Change the type of elevation used. If your geoid model is not in the list, you can add it to the TOPODRONE Post Processing program yourself.
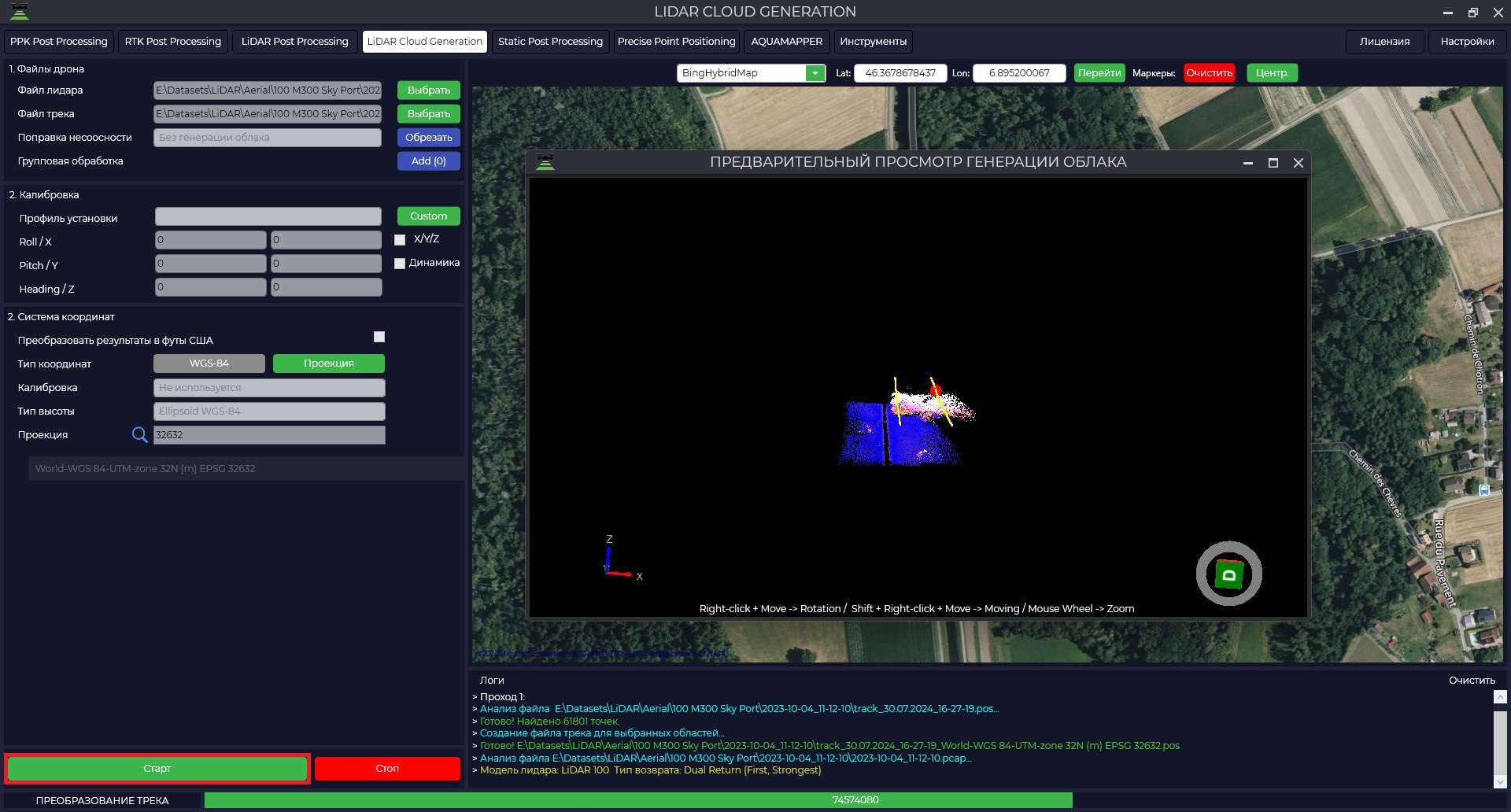
Next, click on the "Start" button to start the Angle Calculation or point cloud generation process.
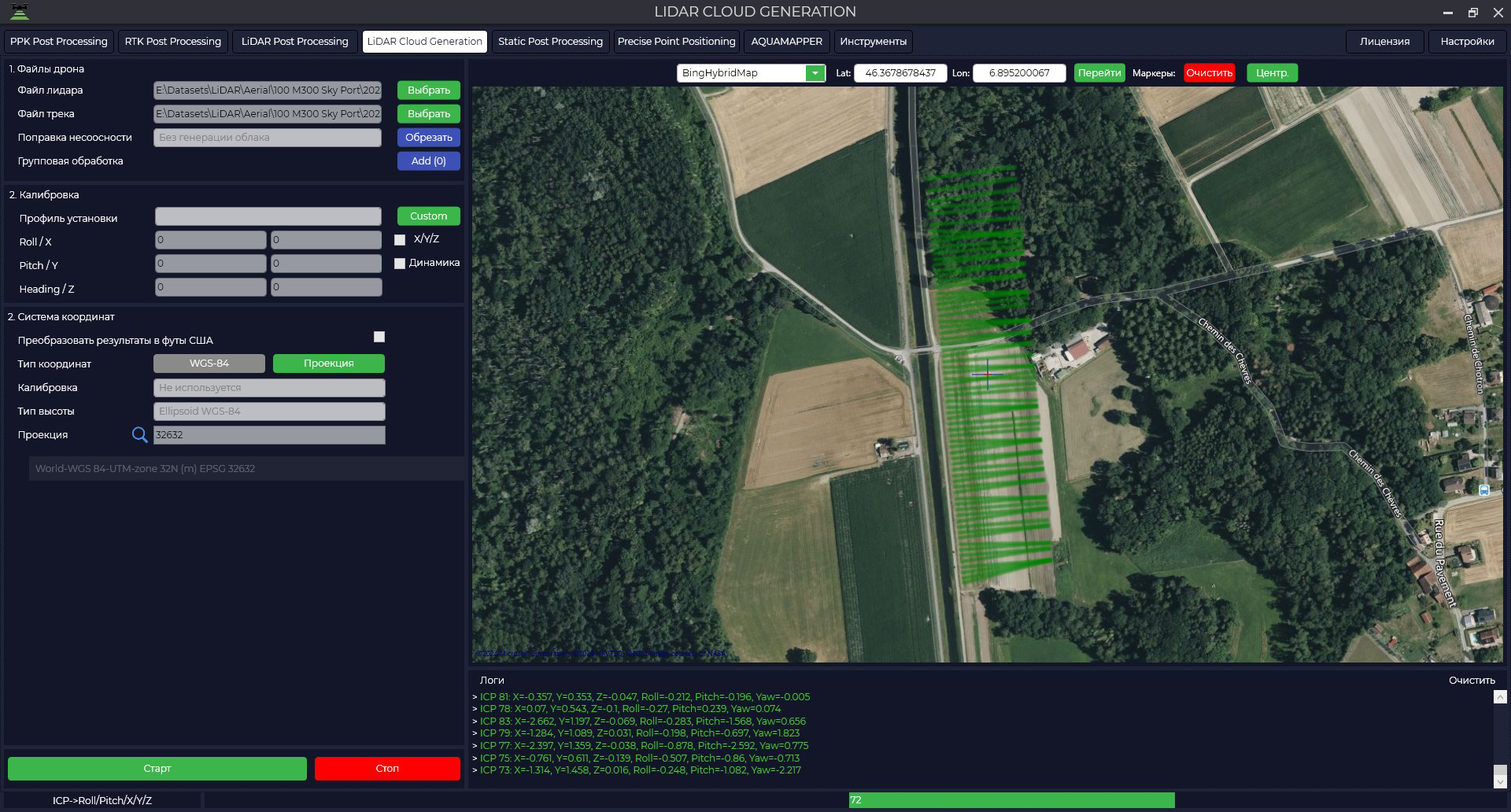
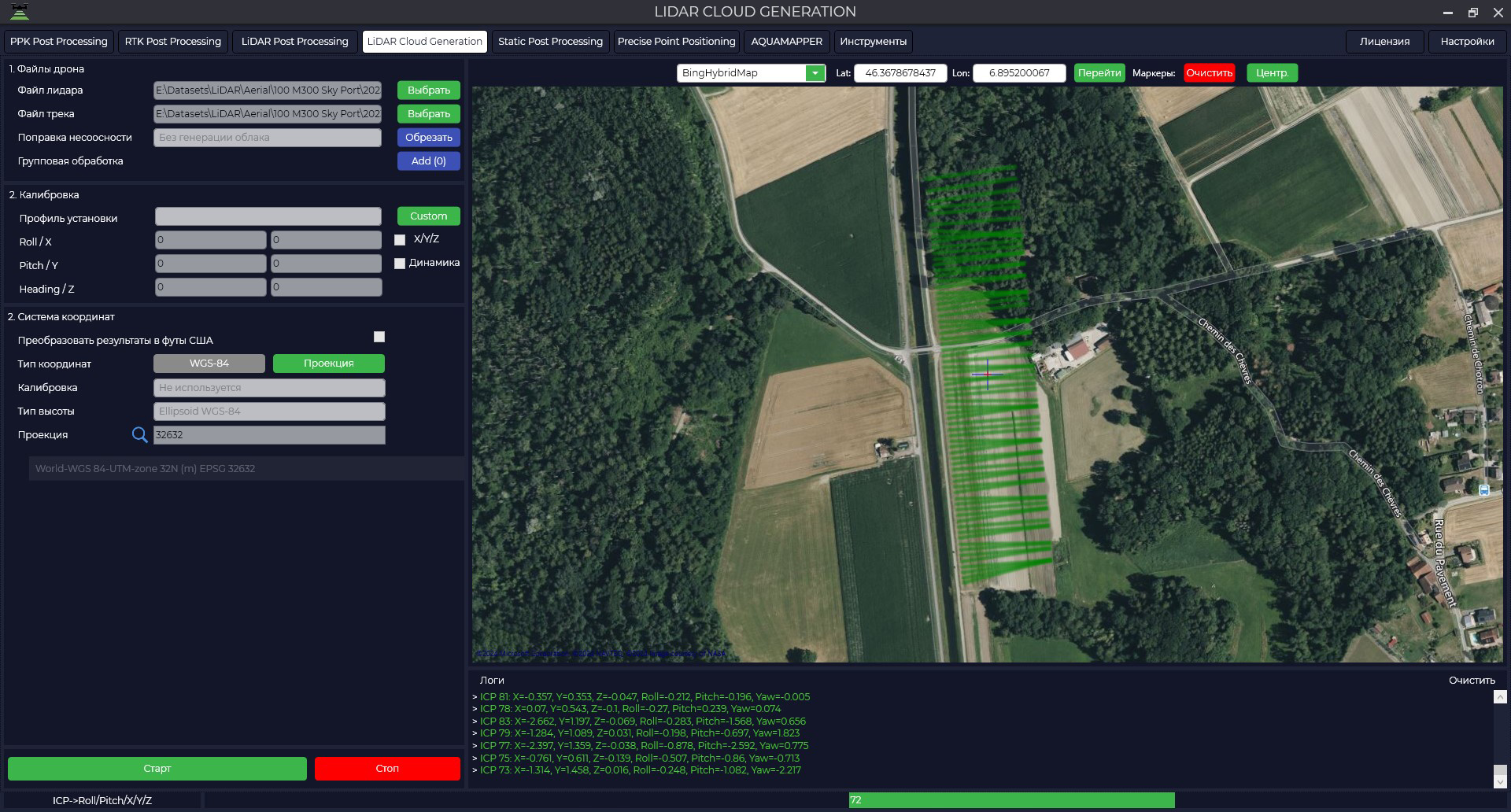
In the process of calculating the angles, the program will perform several passes, which will result in the calculated values of Roll, Pitch иand Heading в рамках всех проходом, т.е. на каждый отдельный сегмент облака будут свои значения углов. В случае использования этой функции необходимо использовать все облако.angles.
ВWhen полеthe «Поправкаcalculation несоосности»is необходимоcomplete, выбратьthe какое-либоprogram значениеwill дляinform расчетаyou углов.that Оптимальнымyou вариантомcan будетsave выбратьthe минимумcalculated дваcalibration галсаparameters сinto фиксированнойpresets траекториейfor сfurther наличиемselection вертикальныхof объектов.values from the drop-down list.
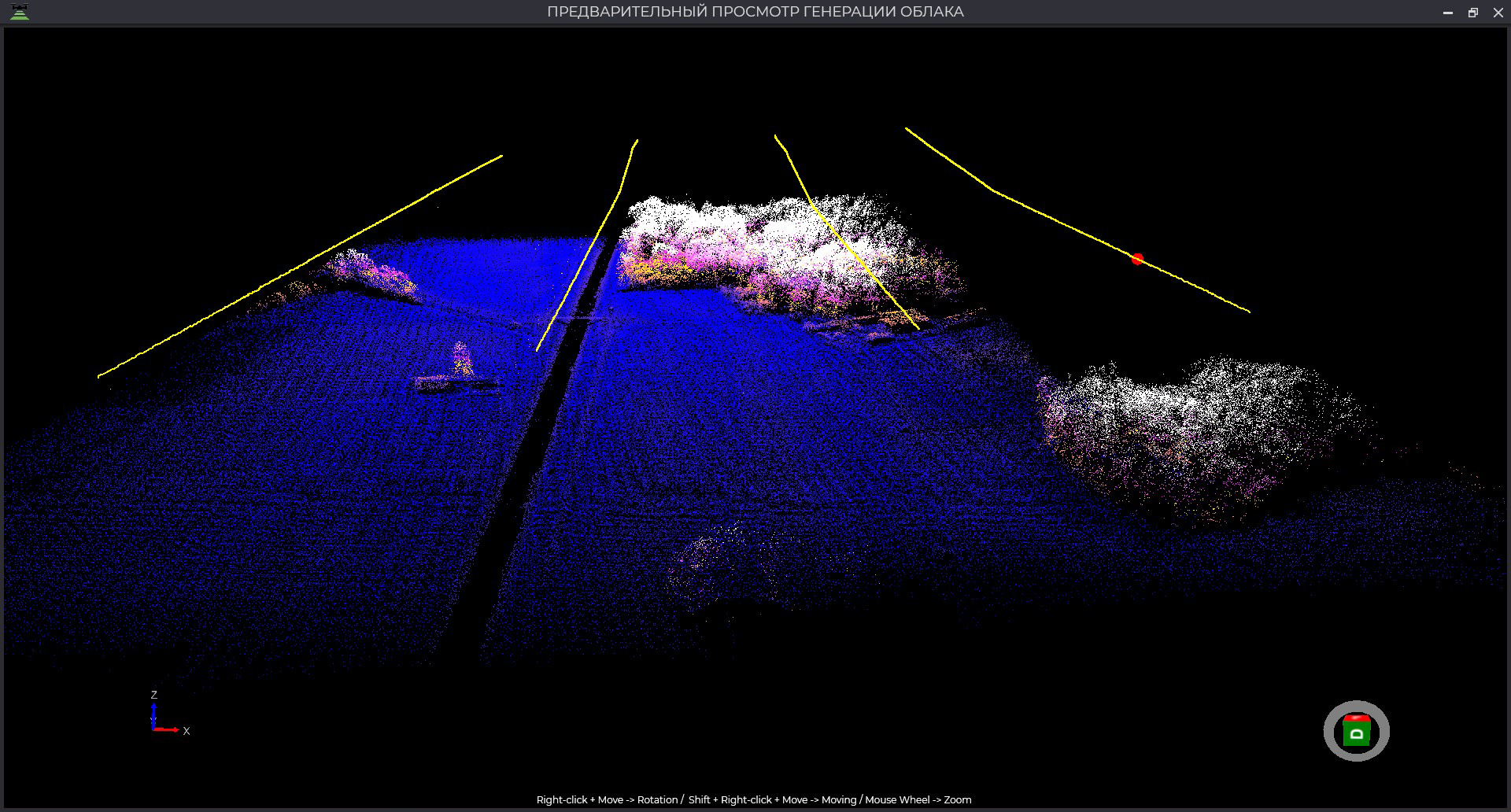
ДляWhen выбораcompleted, системыa координатcloud вамwill необходимоbe нажатьgenerated кнопкуin «СистемаLAS/LAZ координат»format иin выбратьthe изsource предложенногоdata списка вашу или ввести название системы координат в строке поиска. Если вашей системы координат нет в списке, то вы сами можете её добавить в программу TOPODRONE Post Processing.folder.
Измените тип используемой высоты. Если вашей модели геоида нет в списке, то вы сами можете её добавить в программу TOPODRONE Post Processing.
Далее нажимаем кнопку «Старт» для запуска процесса Расчета углов или генерации облака точек.
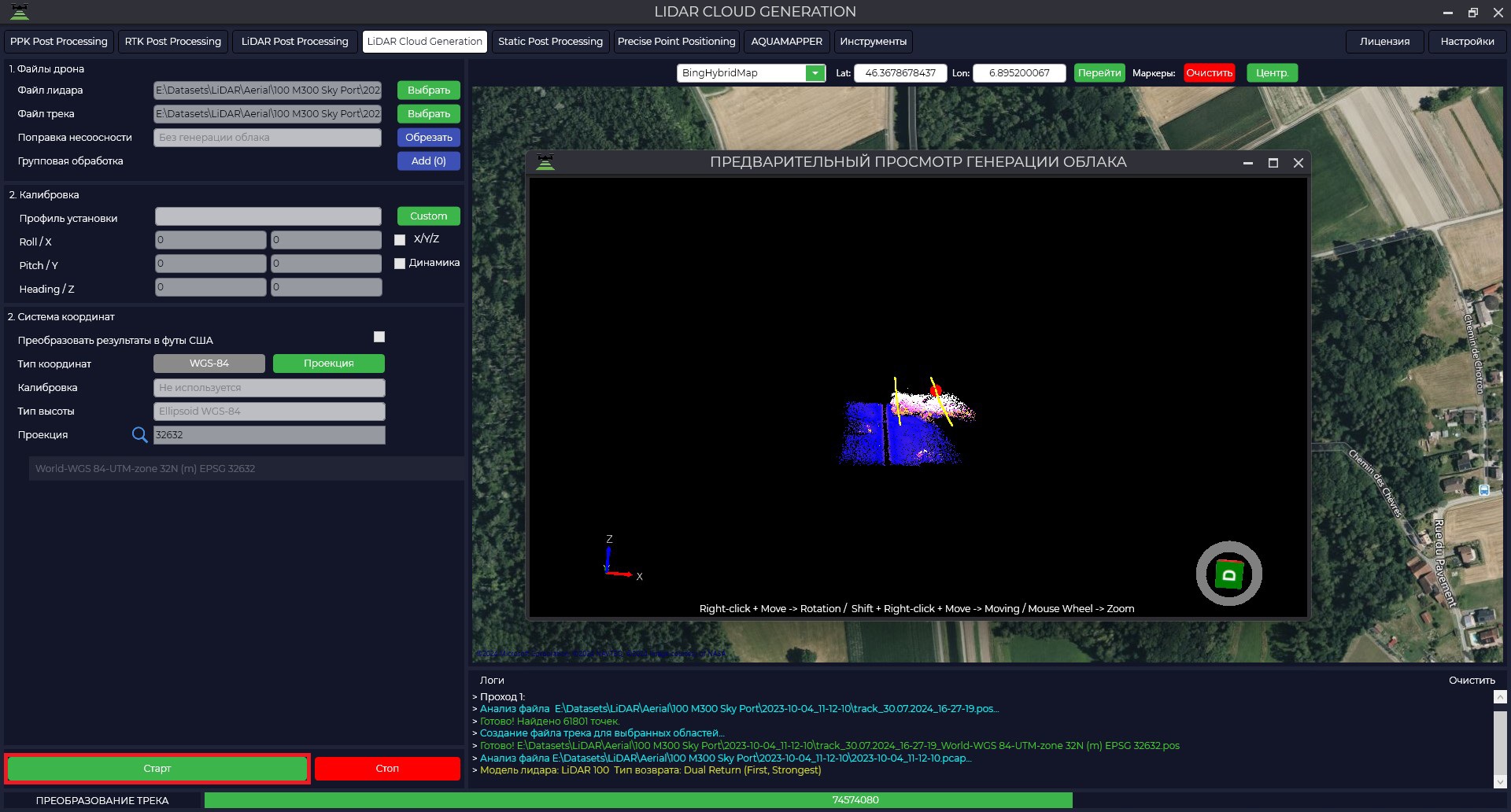
В процессе расчета углов программа будет выполнять несколько проходов, по результатам которых получите расчетные значения углов Roll, Pitch и Heading.
Закончив расчет, программа сообщит о возможности сохранить расчетные параметры калибровки в пресеты для дальнейшего выбора значений из выпадающего списка.
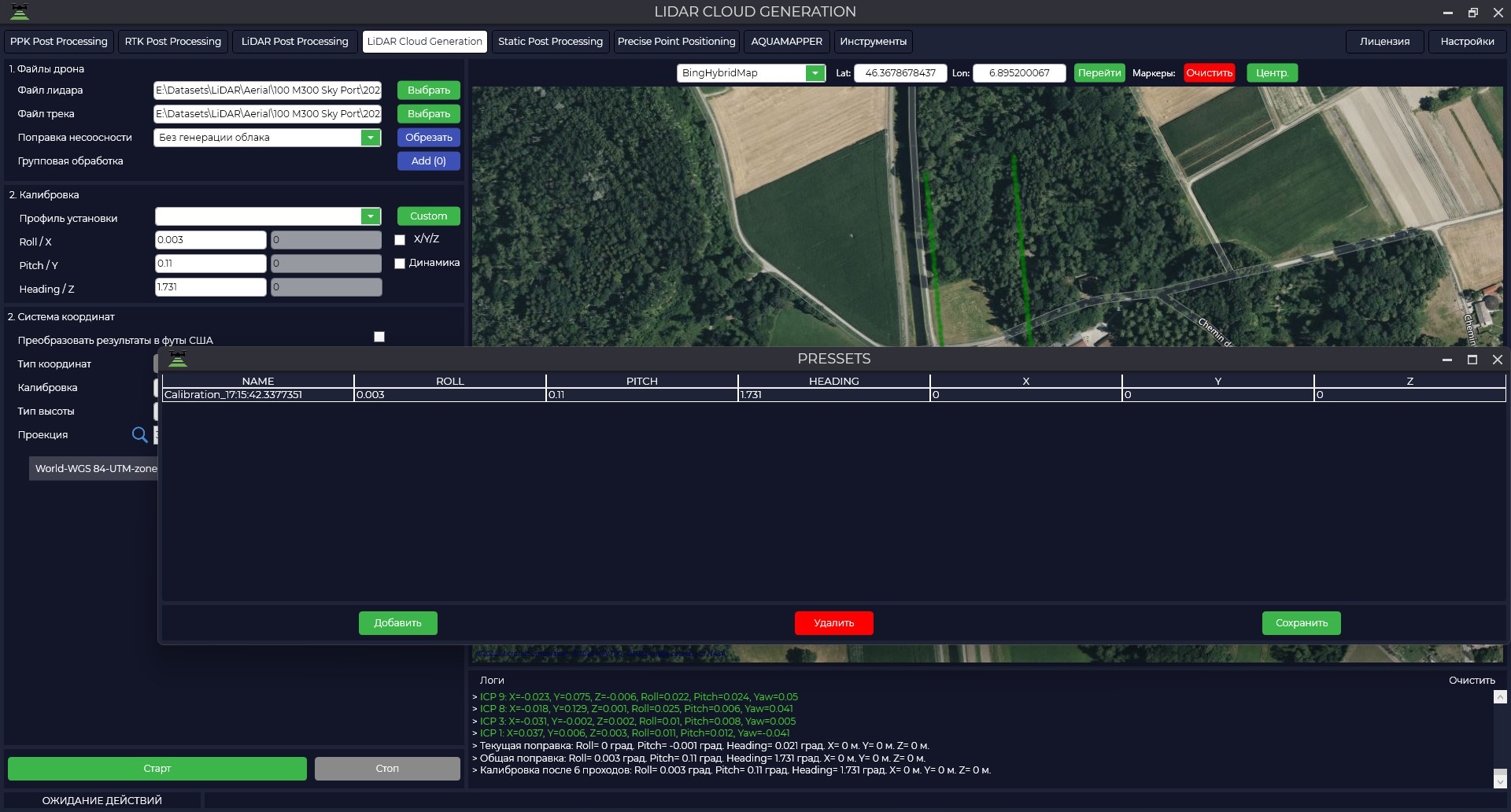
По завершении будет сформировано облако в формате LAS/LAZ в папке с исходными данными.