LiDAR Post Processing
This module allows to calculate the trajectory of the laser scanner together with the inertial system data on the server solution of TOPODRONE company, thus not burdening the user's computer.
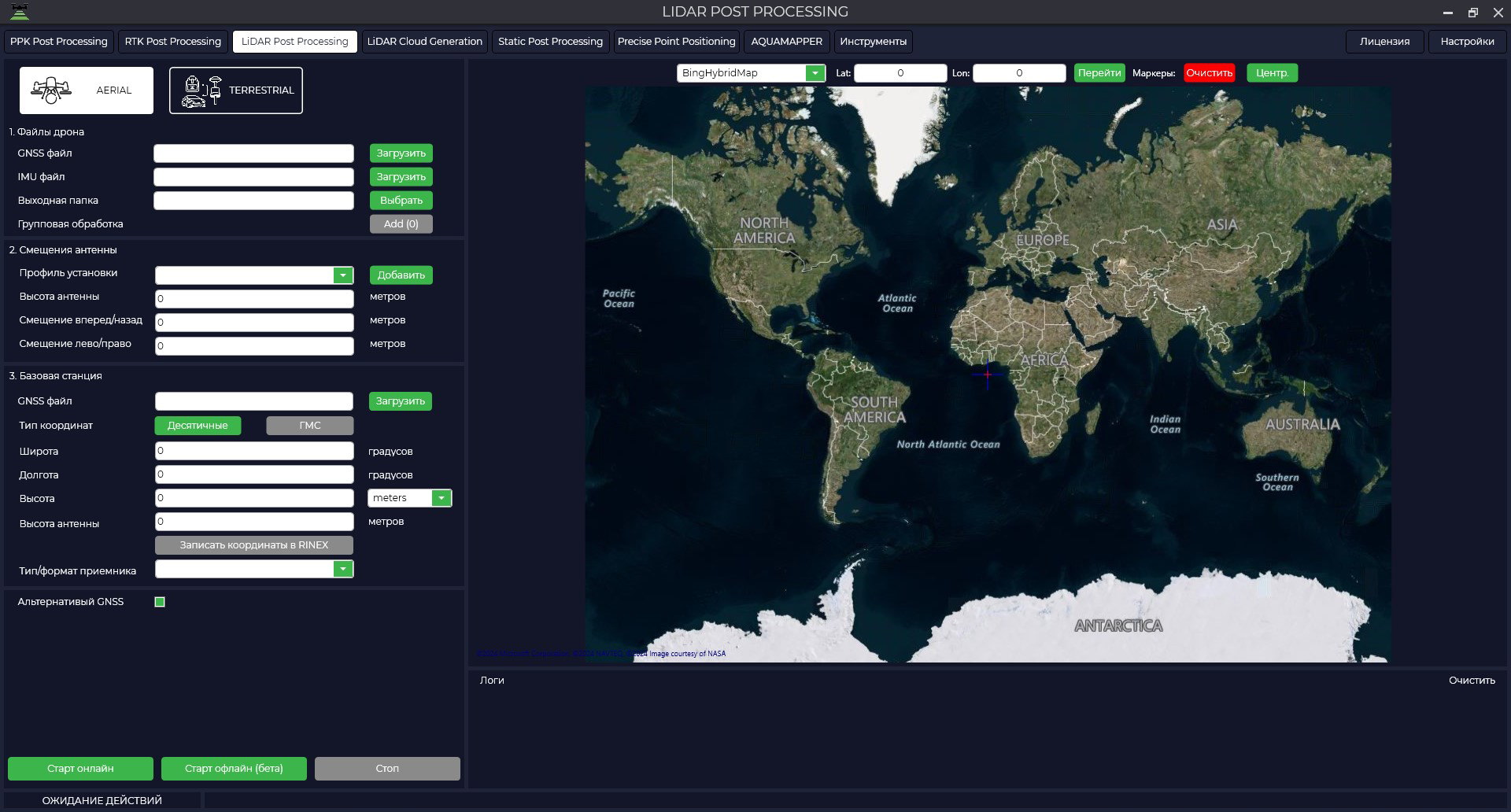
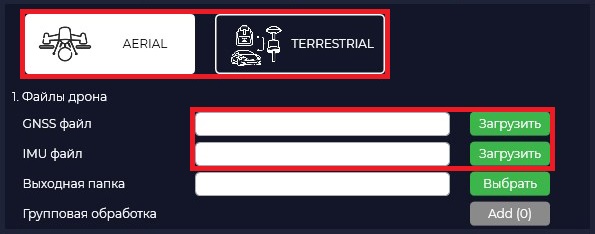
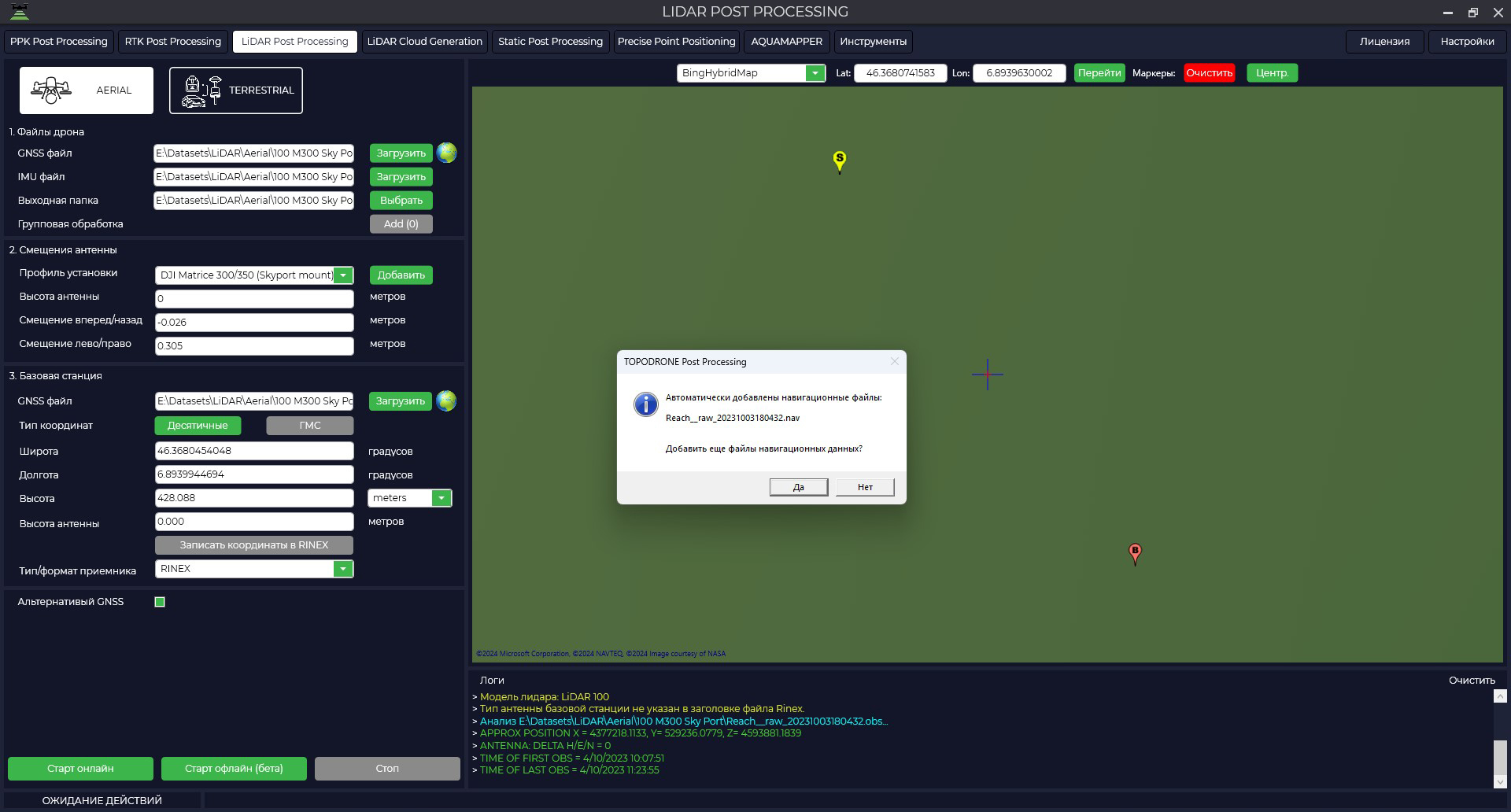
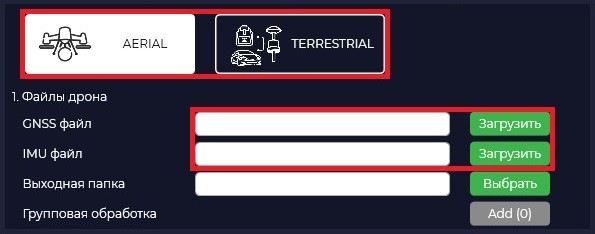
- In order to start processing it is necessary to start the TOPODRONE Post Processing program and go to the LiDAR Post Processing tab.
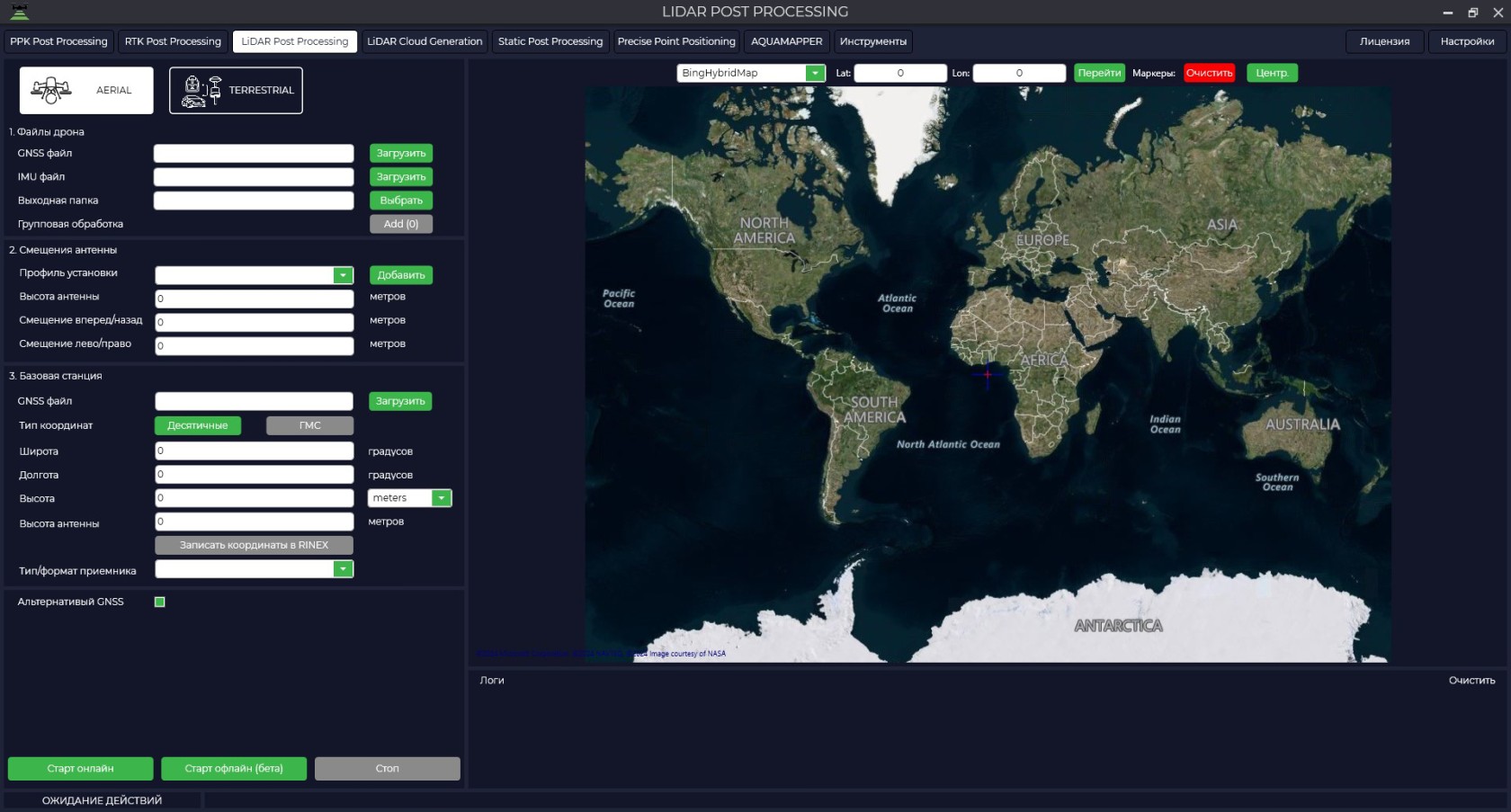
- Specify the installation type and path to the laser scanner files in the "GNSS file" field. Inertial data file will be loaded automatically in the "IMU file" field. Also by default the data will be saved to the source folder, but you can change the saving location in the "Output folder" field.
The "Logs" window displays all information on the downloaded files: type of scanner used, type of inertial system used, start/end time of file recording on the scanner and base station, as well as all information on data processing.

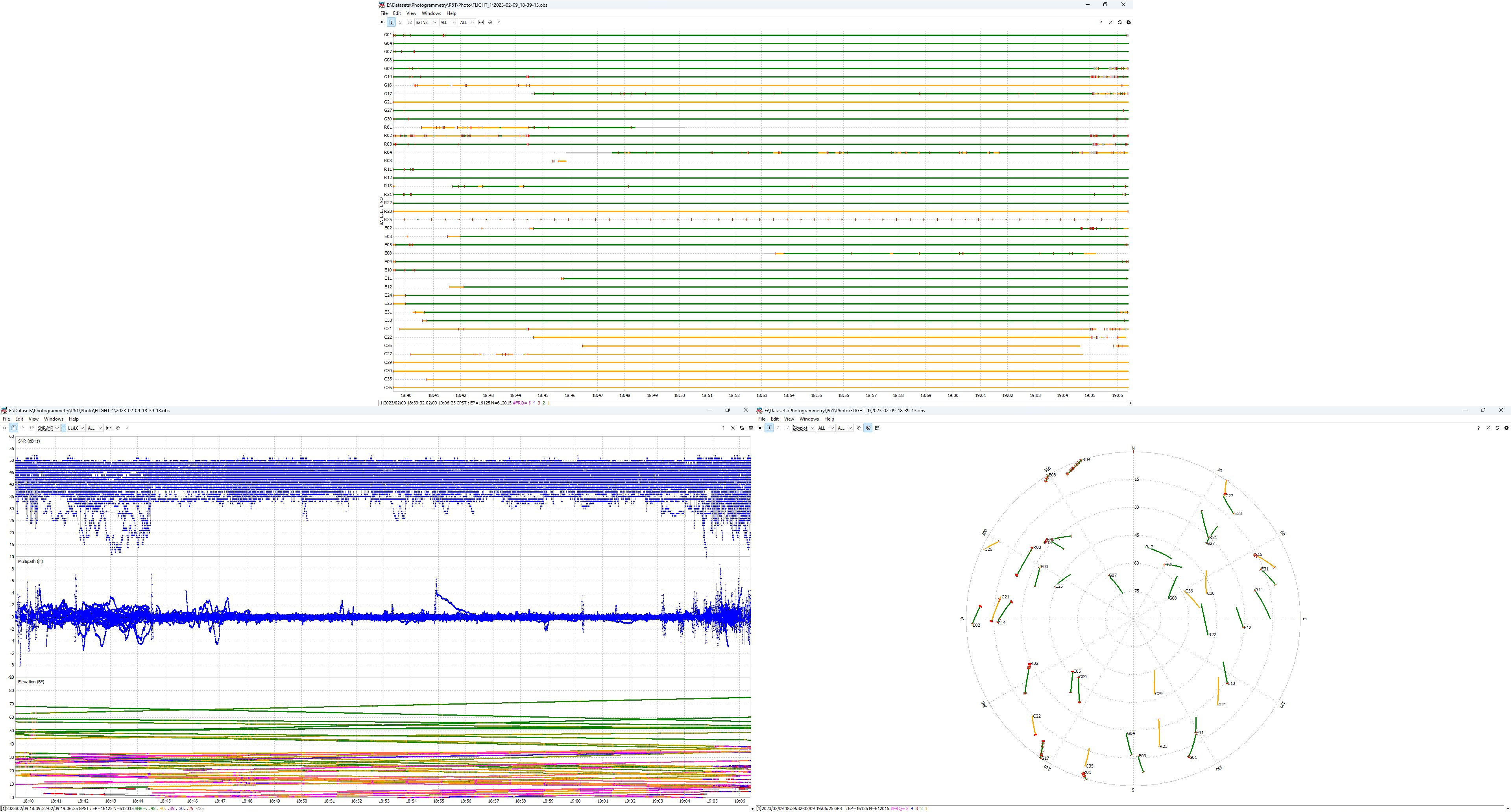
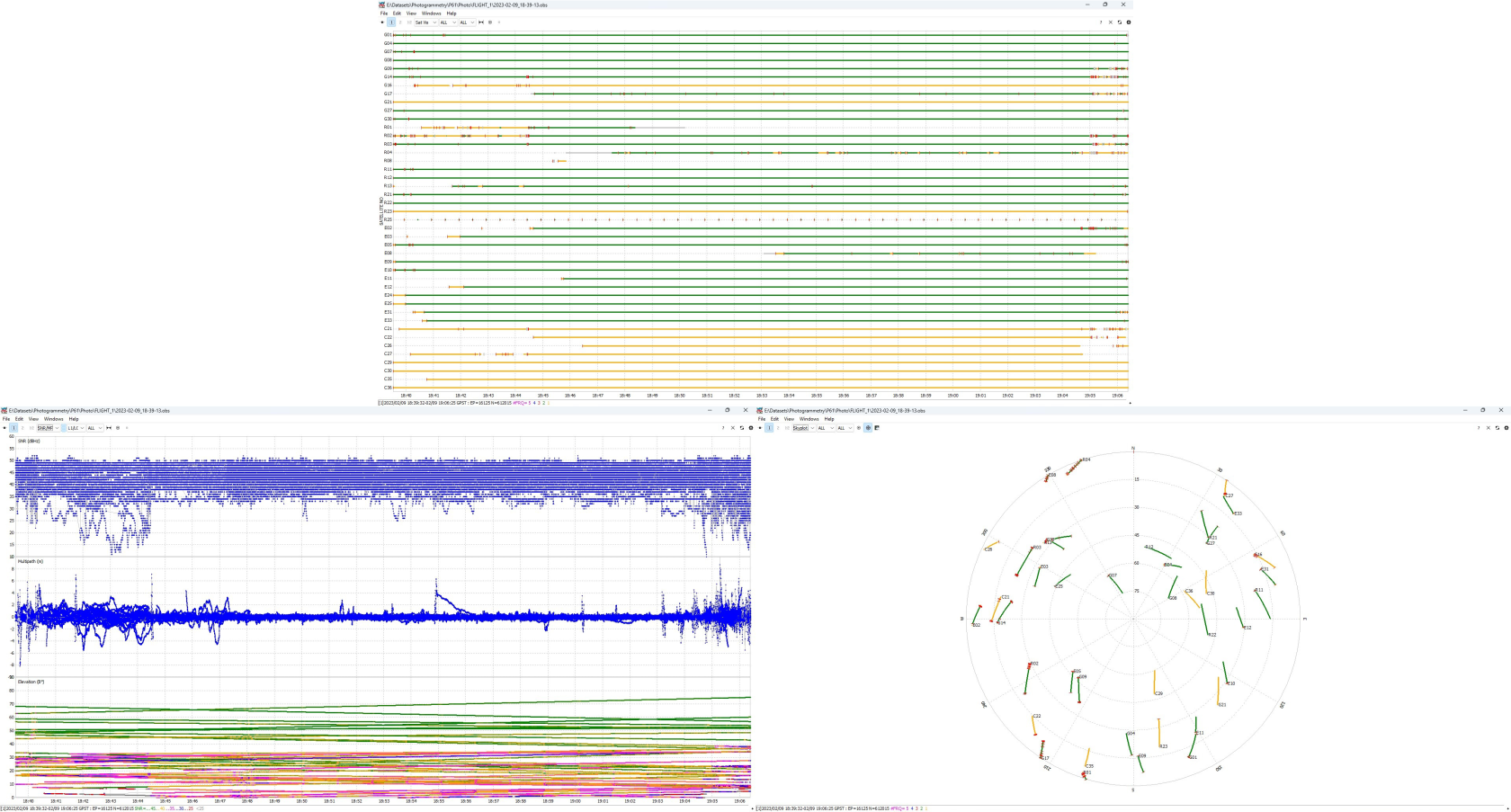
- By pressing the  button you can analyze the quality of the data.
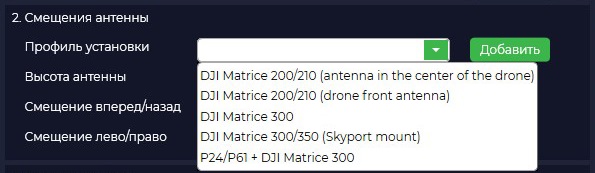
- Select your equipment model from the drop-down list.
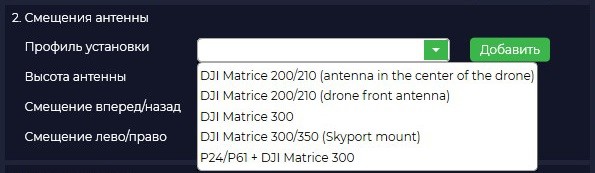
The offsets will be loaded from the library automatically. Note that if you have selected the AERIAL setting type, the presets for TERRESTRIAL are not displayed.
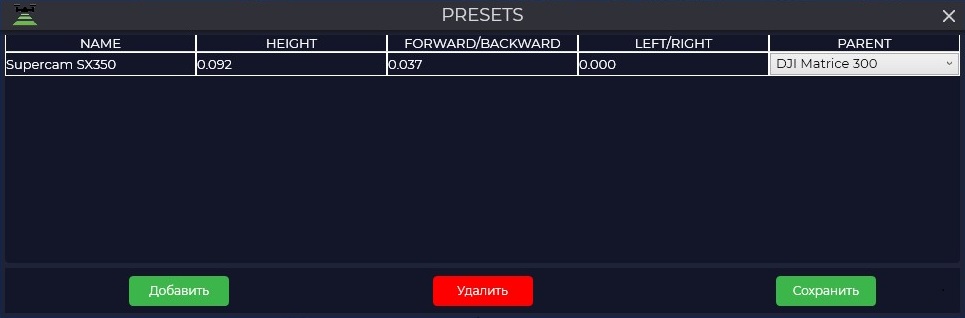
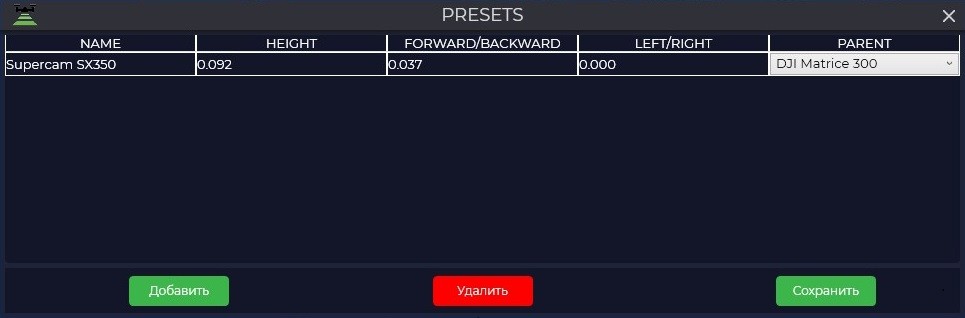
- If your offsets differ from the standard ones, you should click the "Add" button and enter your values.
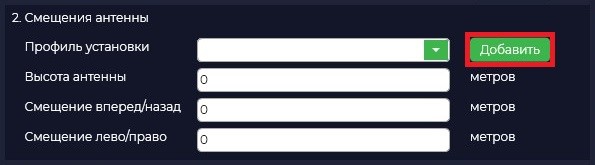
- Если центр IMU располагается сзади, ниже и правее ГНСС антенны по ходу движения, то на этапе постобработки значения смещений указываются в ПО TOPODRONE Post Processing как положительные значения (без знака -) в метрах.
Если центр IMU располагается спереди, выше и левее ГНСС антенны по ходу движения, то на этапе постобработки значения смещений указываются в ПО TOPODRONE Post Processing как отрицательные значения (со знаком -) в метрах.в метрах.Параметр PARENT отвечает за то, чтобы программа могла понять каким образом был установлен сенсор во время сканирования. DJI Matrice 300 - сенсором вперед, P24/P61 + DJI Matrice 300 - сенсором назад.
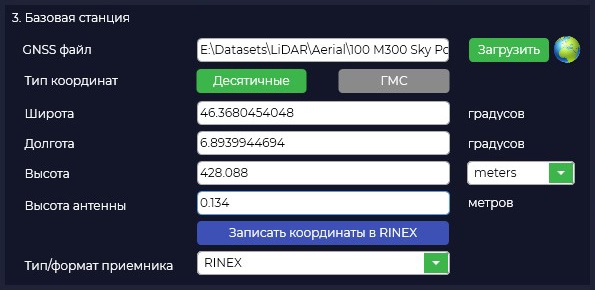
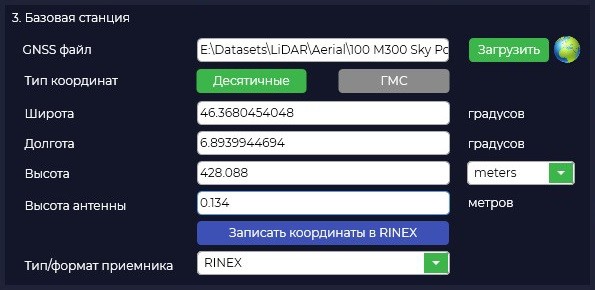
- Загрузите файл базовой станции в окне «Базовая станция» в поле «GNSS фаил».
При загрузке файла измерений базовой станции в формате RINEX автоматически будут загружены эфемериды, при этом вы можете загрузить эфемериды с приемника TOPODRONE который установлен в Вашем лазерном сканере или скаченные отдельно.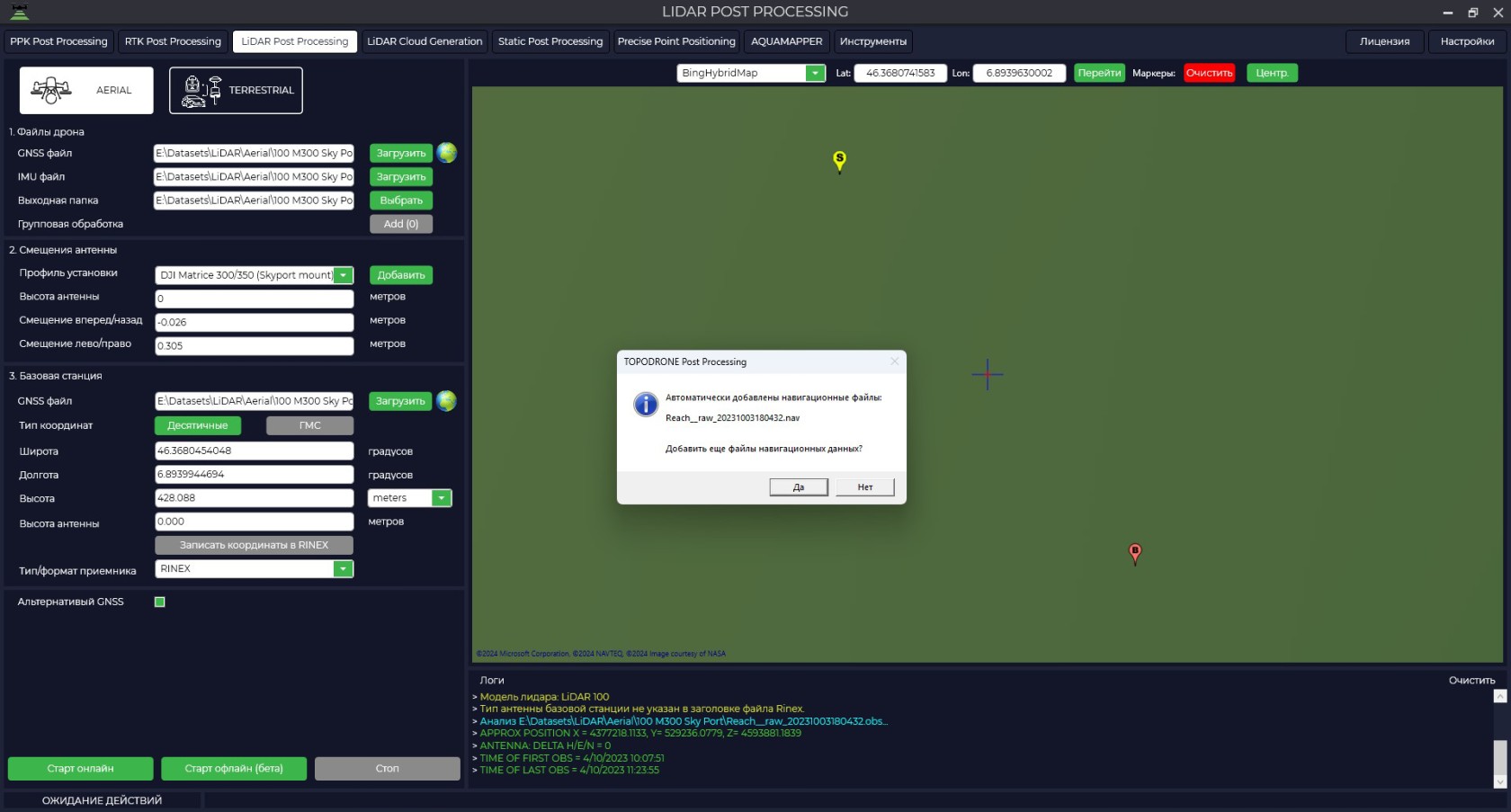
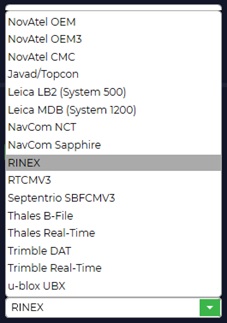
- Из выпадающего списка приемников необходимо выбрать тот который поддерживает TOPODRONE Post Processing
Программа TOPODRONE Post Processing поддерживает загрузку данных с разных типов приемников, при этом если Вашего приемника нет в списке, Вы всегда можете выполнить конвертацию файла в универсальный формат RINEX.

- Укажите высокоточные координаты базовой станции.
Координаты базовой станции необходимо указать в формате широта, долгота, высота над эллипсоидом системы WGS 84.
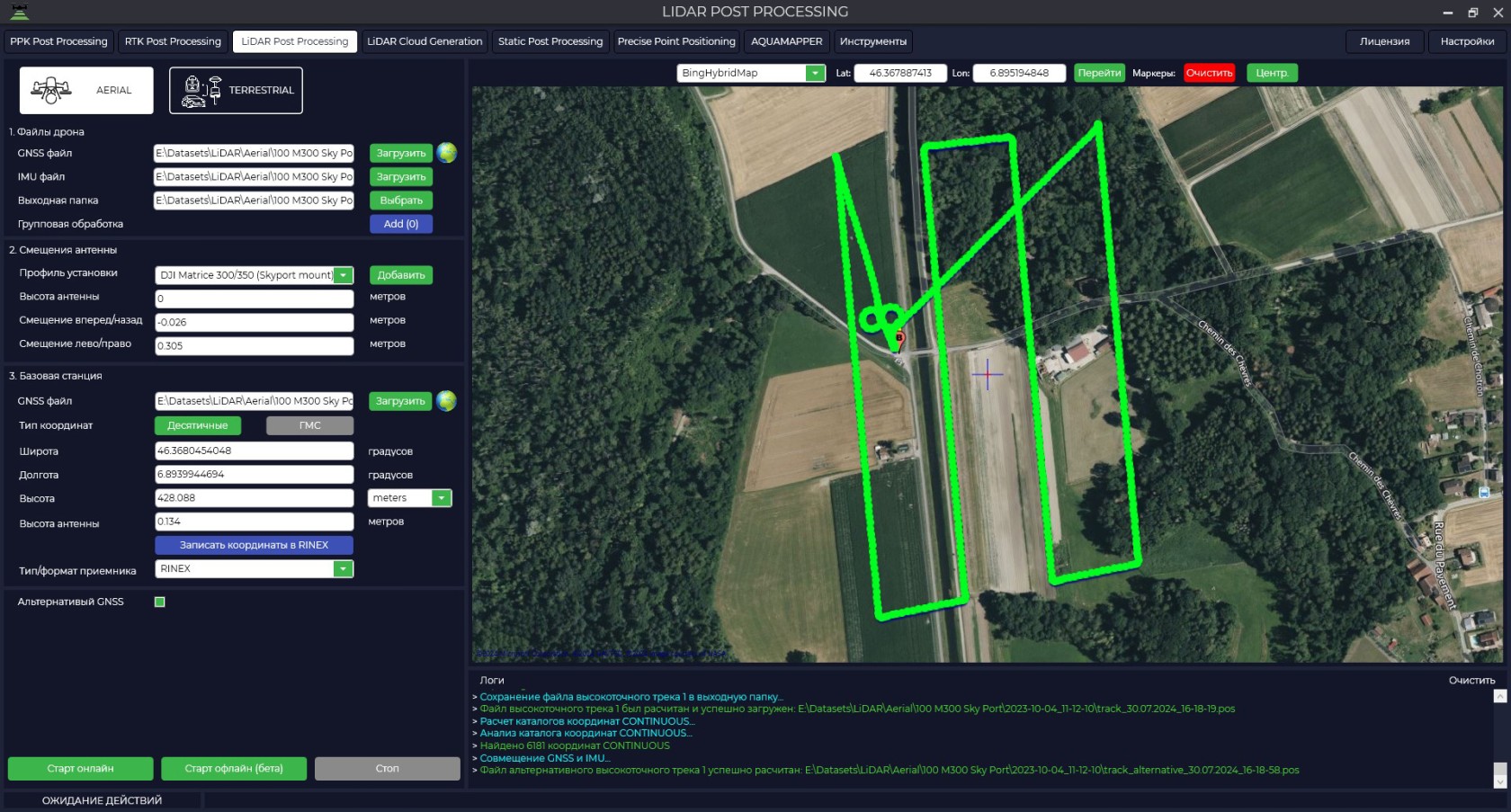
- Запустите обработку нажав кнопку «Старт онлайн».
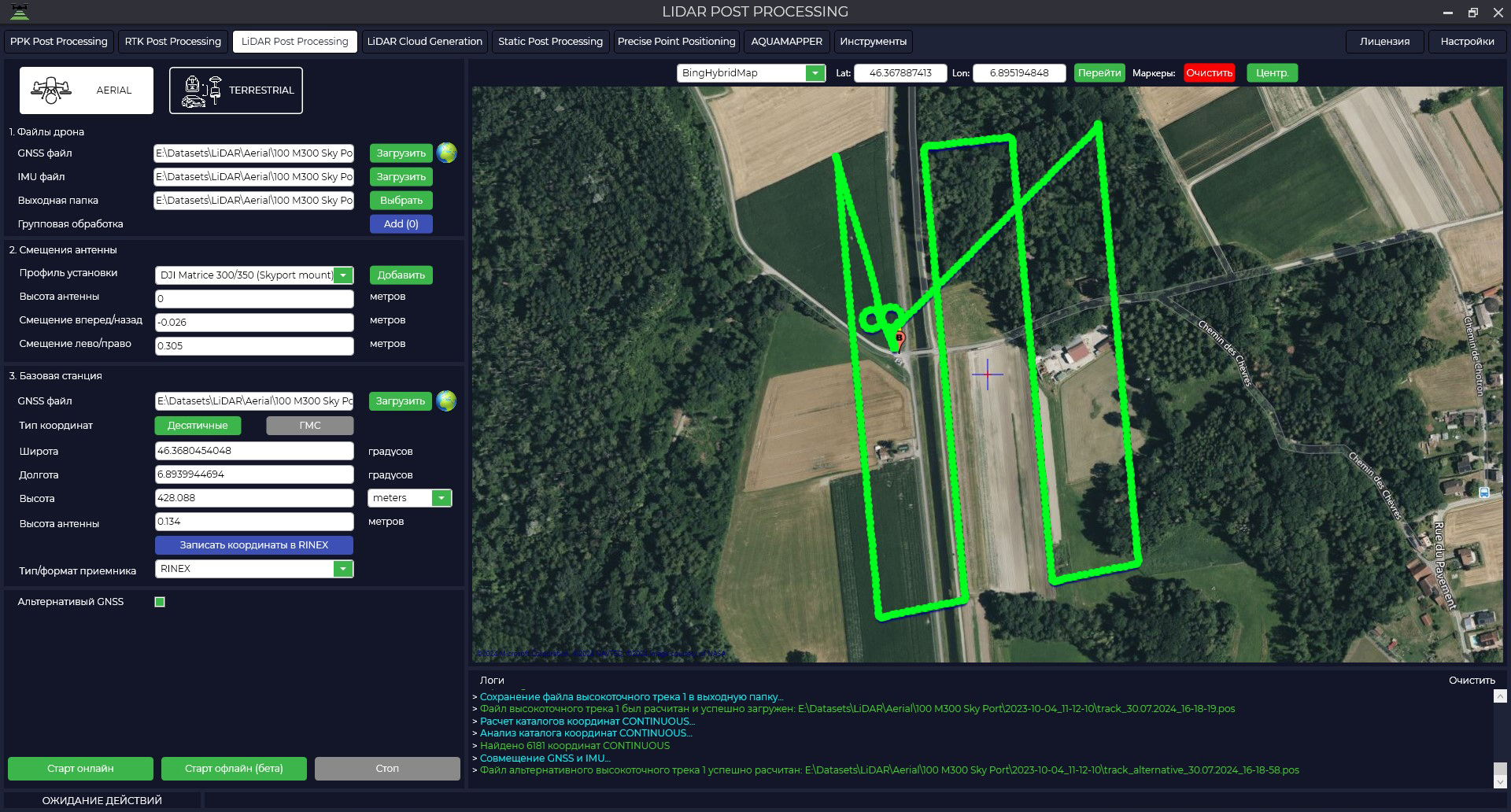
После начала обработки данные загружаются на наш сервер, где происходит совместная обработка траектории по данным ГНСС и IMU. Для корректной обработки у Вас должен быть стабильный интернет без обрывов, если на этапе загрузки данных произойдет сбой, то этап обработки нужно будет запустить повторно.
Галочка "Альтернативный GNSS" позволяет получить дополнительно траектории обработанную на вашем компьютере, возможно с более лучшим качеством решения.
- По итогу обработки файл с высокоточной траекторией будет загружен на Ваш компьютер и в окне карты вы сможете увидеть траекторию и точность, с которой она была получена. Зеленый цвет означает, что траектория была обработана с фиксированным решением, желтый с плавающим решением, а красный цвет сообщит нам, что с автономным решением. Сам файл траектории будет находиться в папке по умолчанию или в той папке, которую вы указали.