
LiDAR Post Processing
This module allows to calculate the trajectory of the laser scanner together with the inertial system data on the server solution of TOPODRONE company, thus not burdening the user's computer.
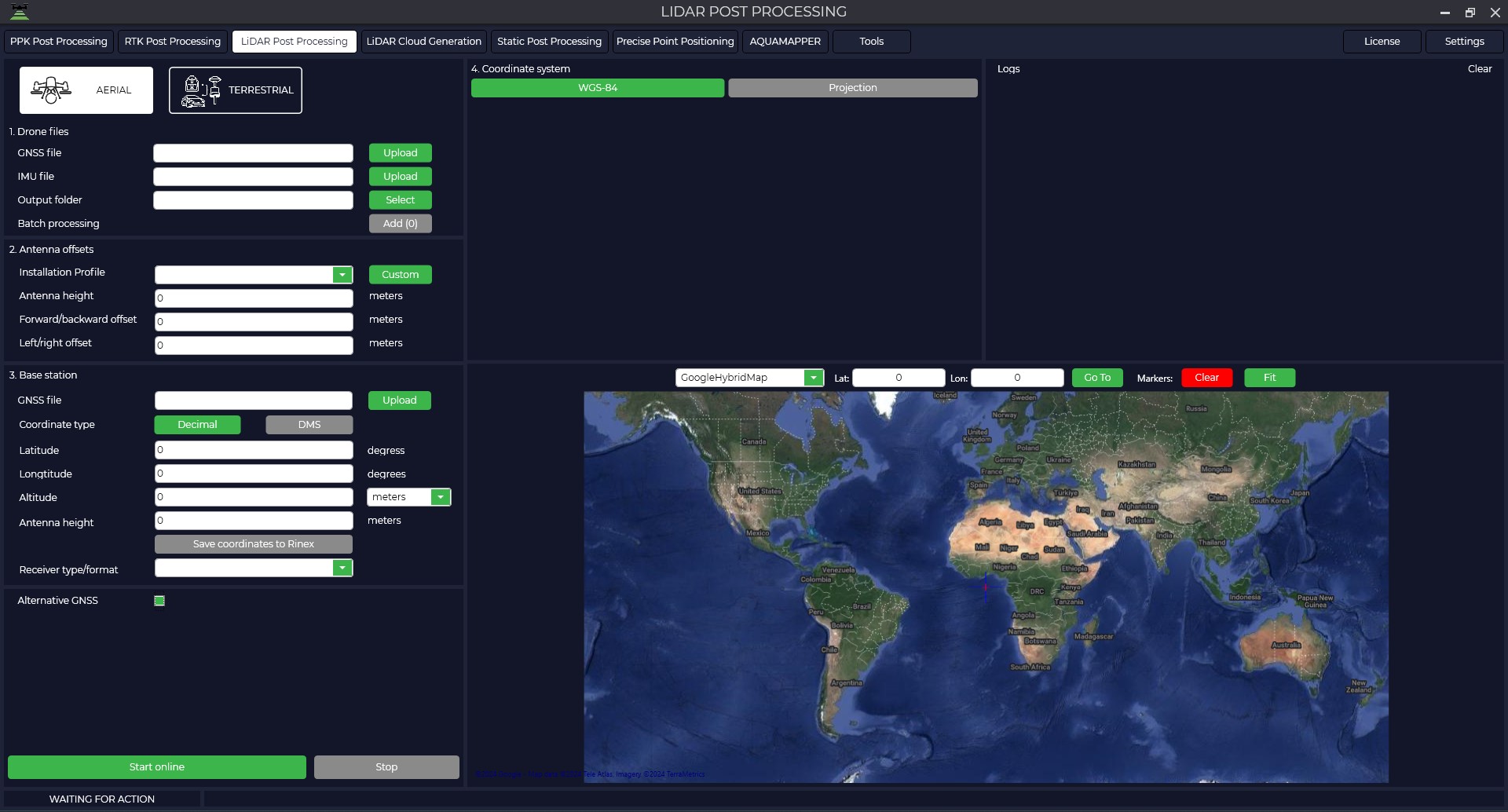
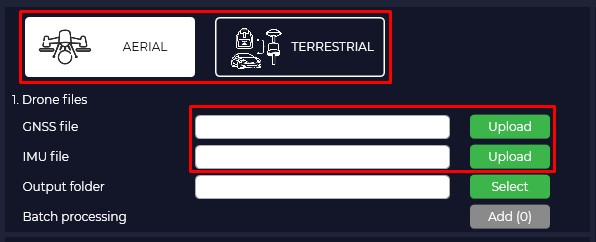
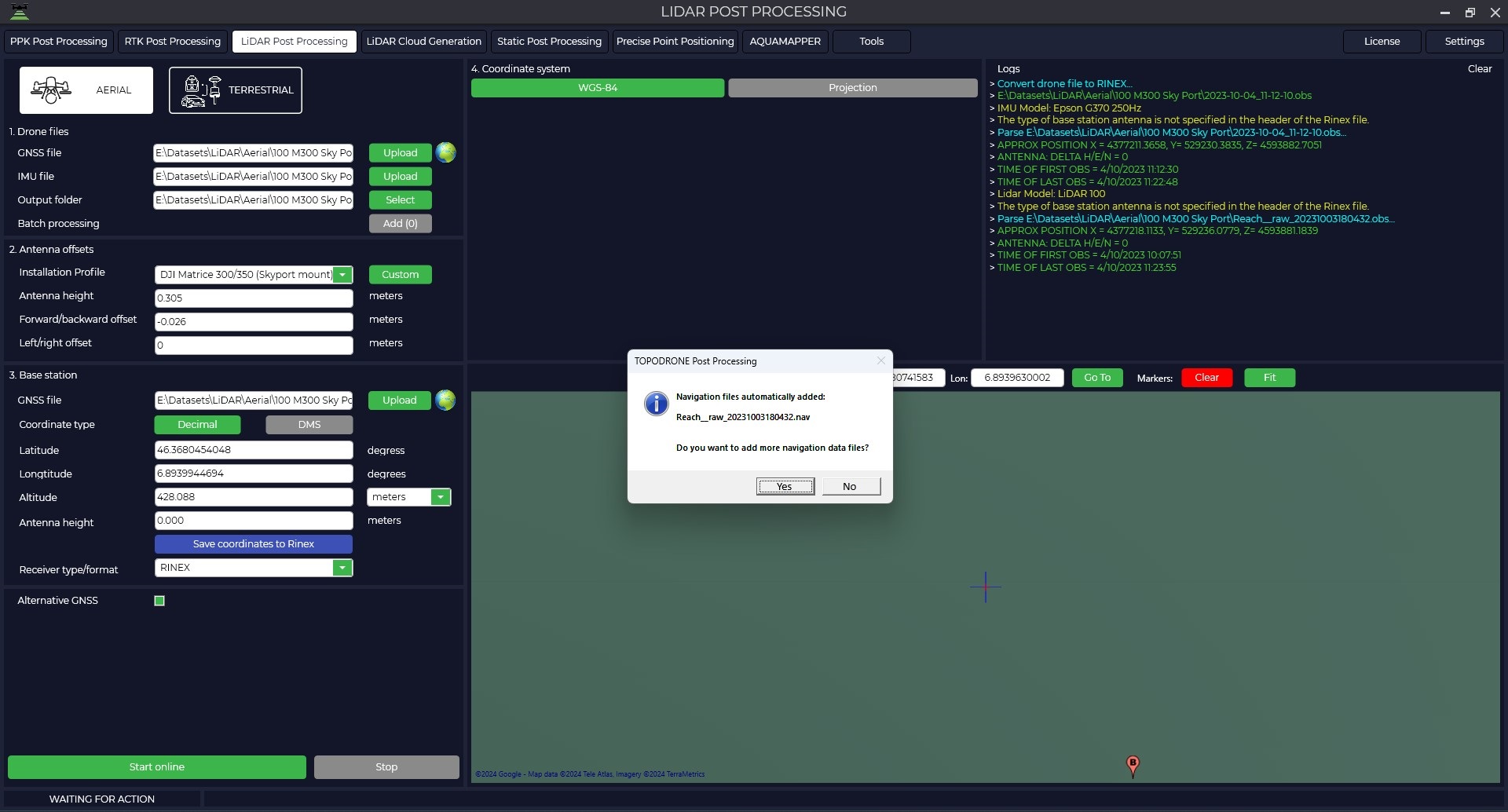
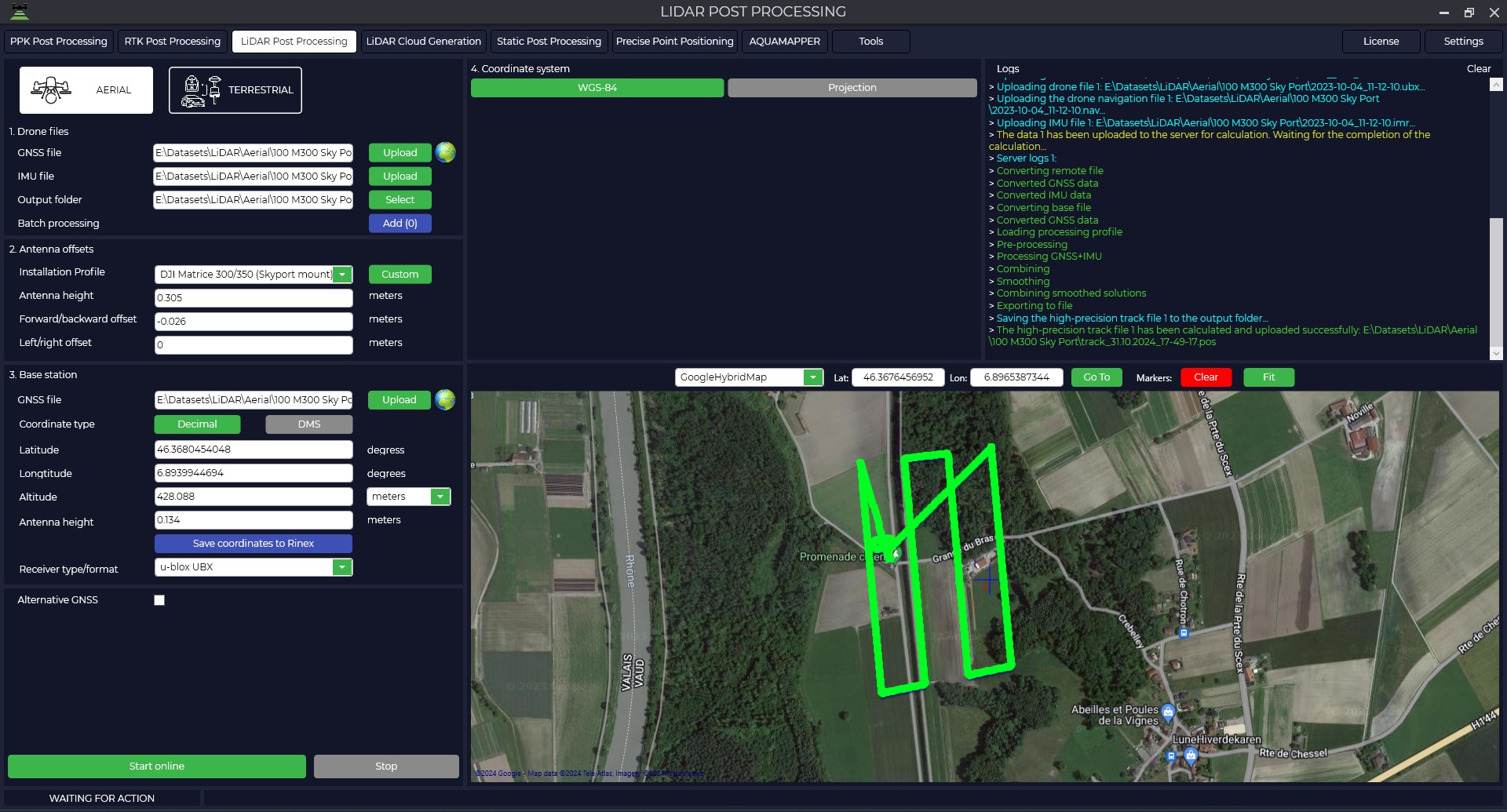
- In order to start processing it is necessary to start the TOPODRONE Post Processing program and go to the LiDAR Post Processing tab.
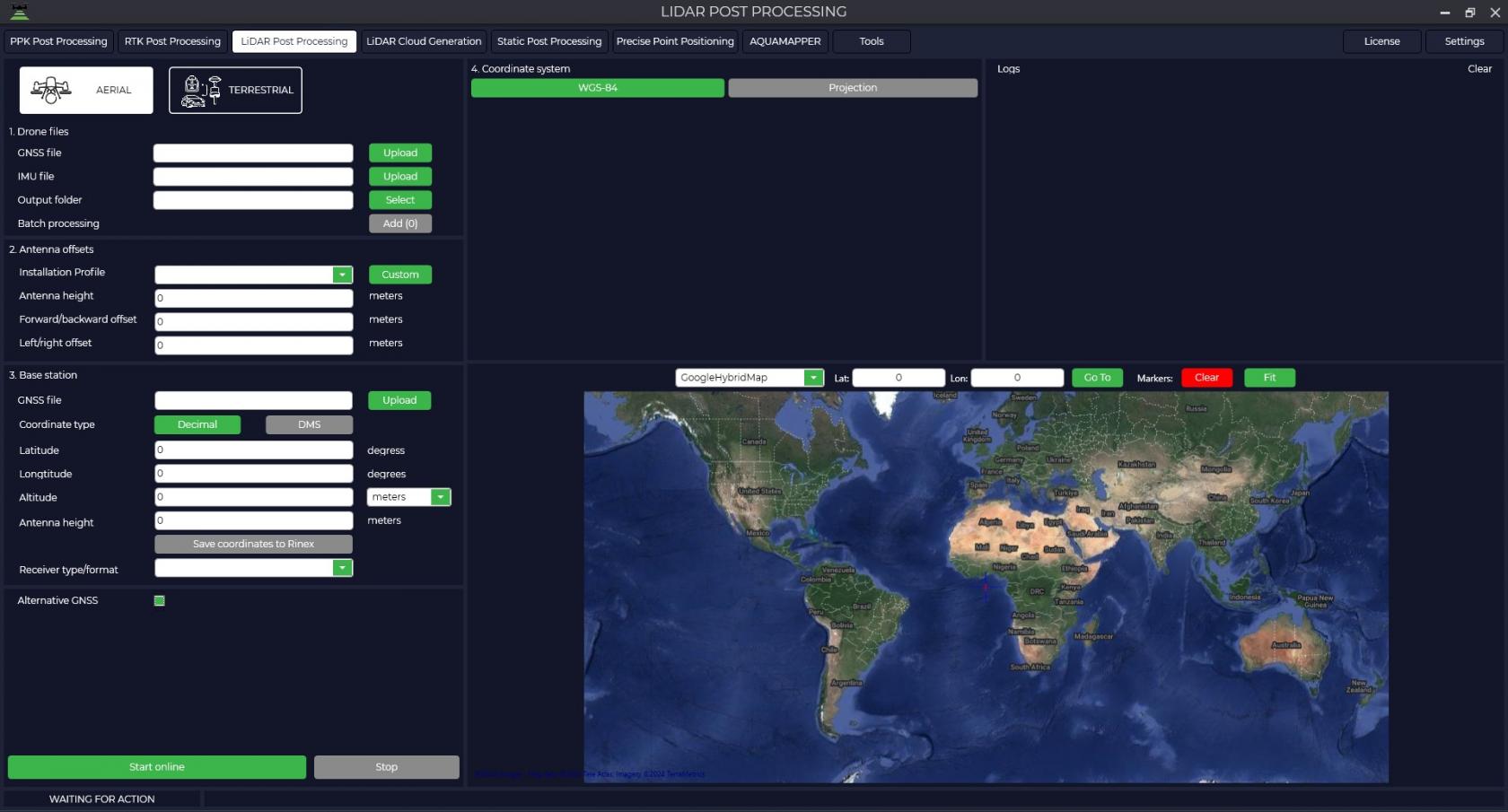
- Specify the installation type and path to the laser scanner files in the "GNSS file" field. Inertial data file will be loaded automatically in the "IMU file" field. Also by default the data will be saved to the source folder, but you can change the saving location in the "Output folder" field.

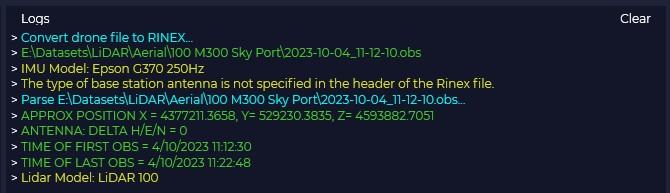
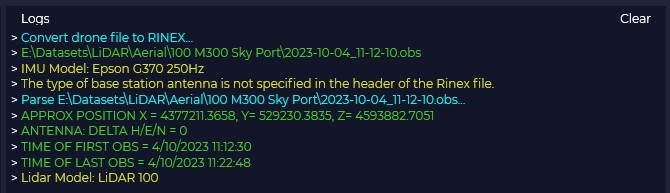
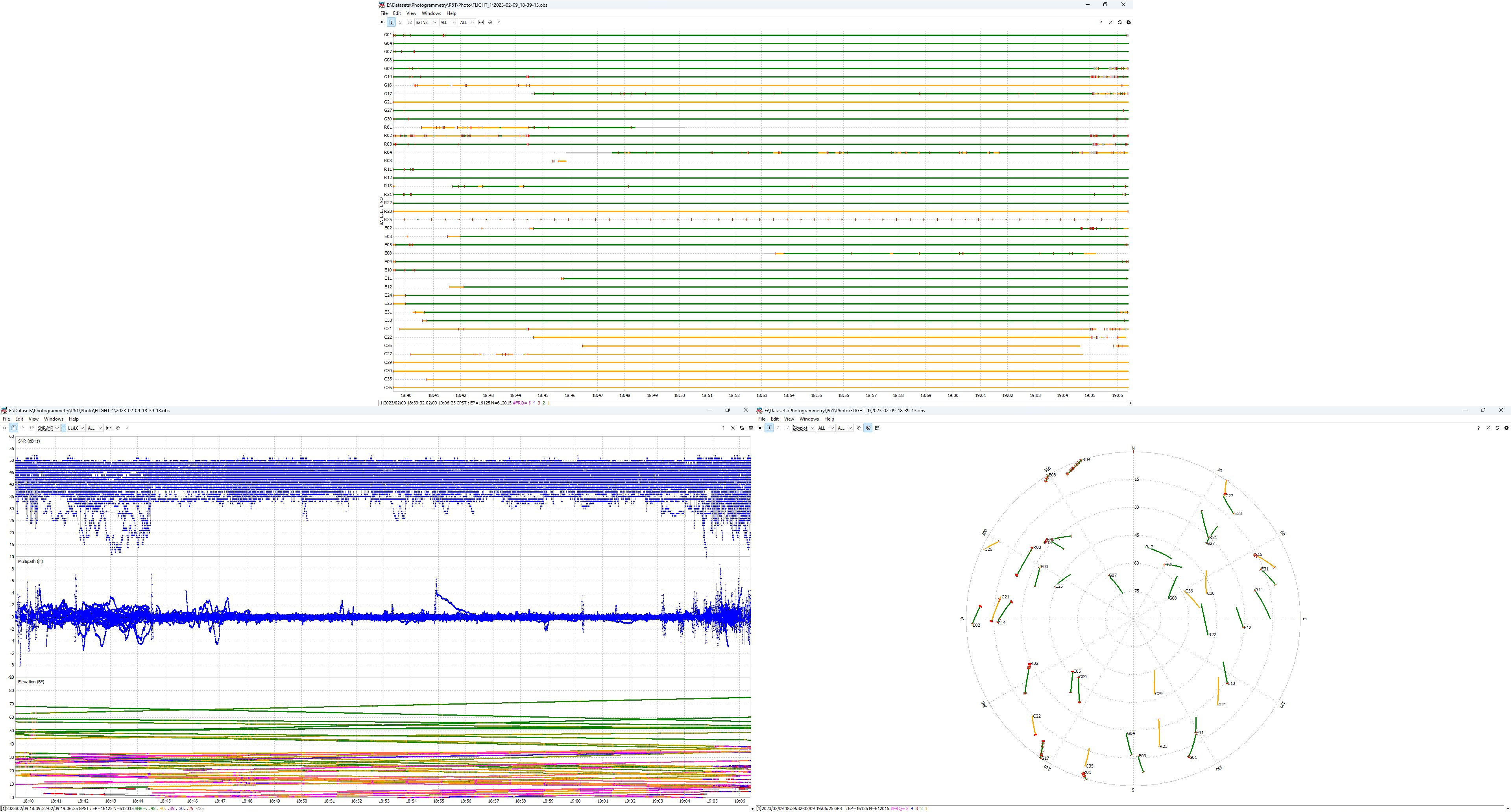
The "Logs" window displays all information on the downloaded files: type of scanner used, type of inertial system used, start/end time of file recording on the scanner and base station, as well as all information on data processing.
- By pressing the
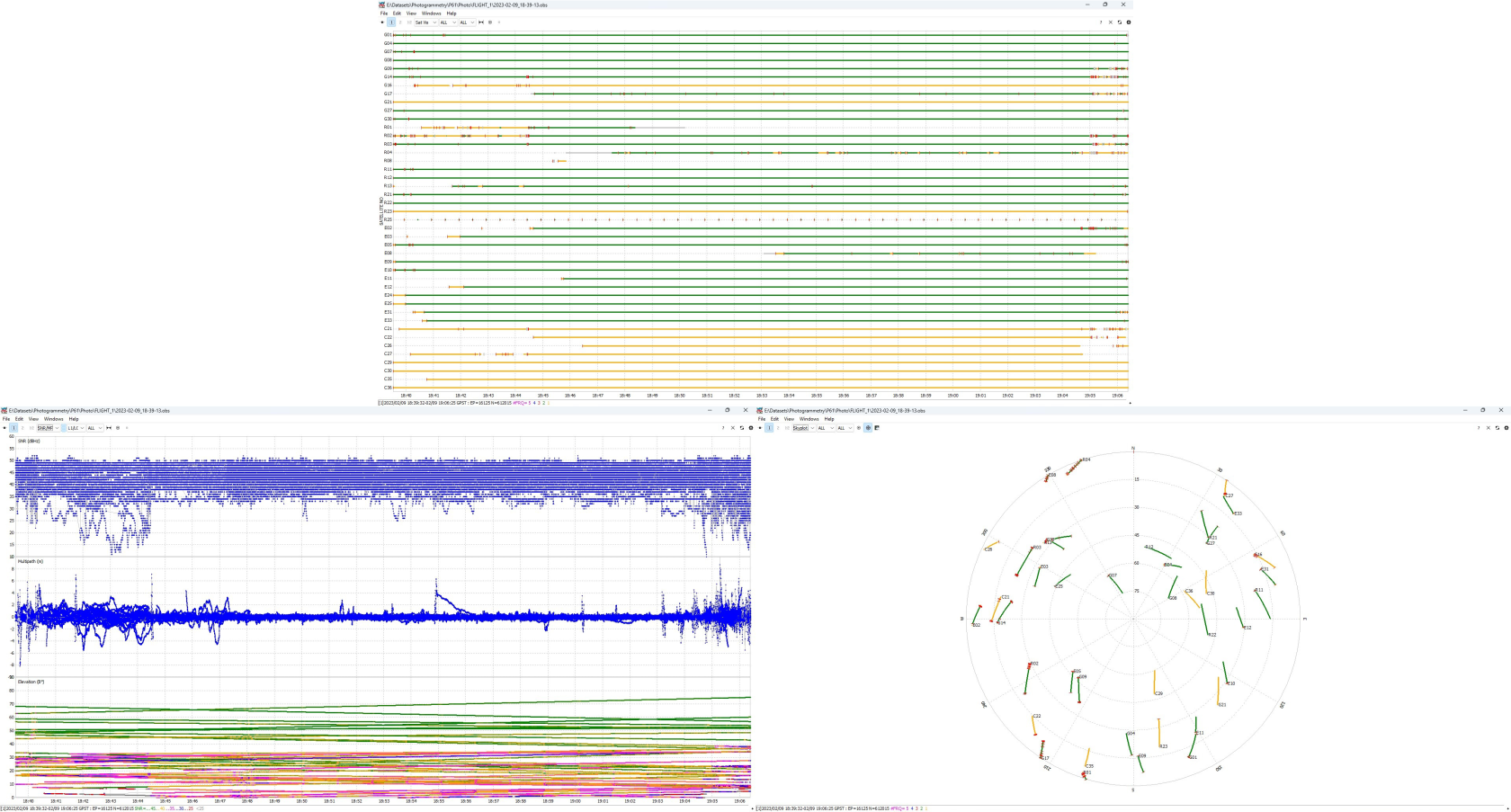
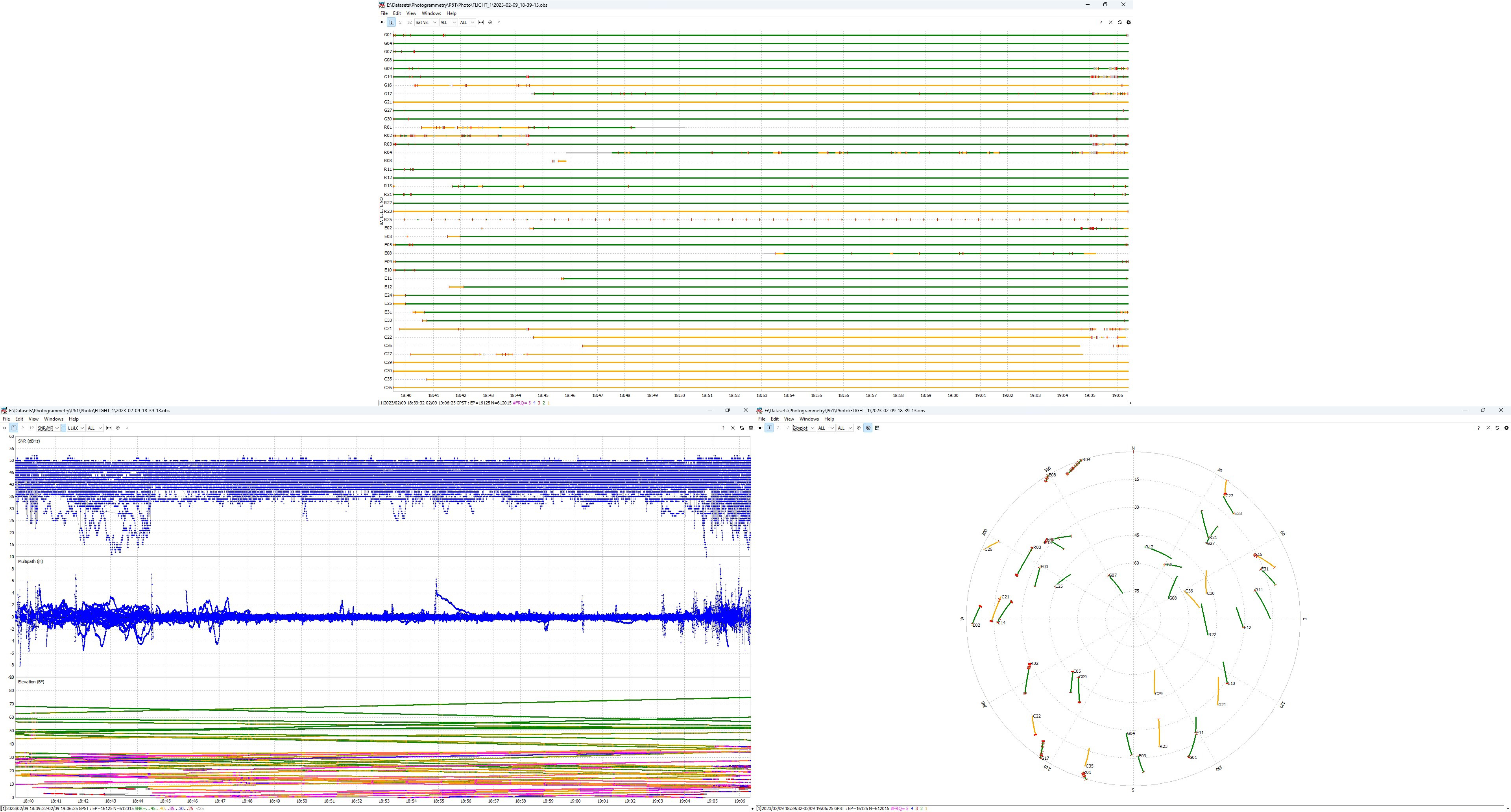
 button you can analyze the quality of the data. For more information about data quality analysis, see Appendix B.
button you can analyze the quality of the data. For more information about data quality analysis, see Appendix B.
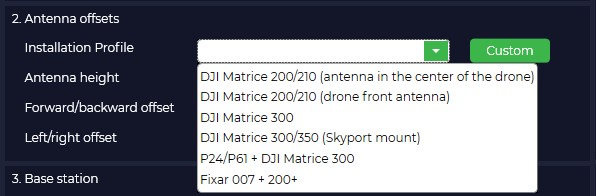
- Select your equipment model from the drop-down list.
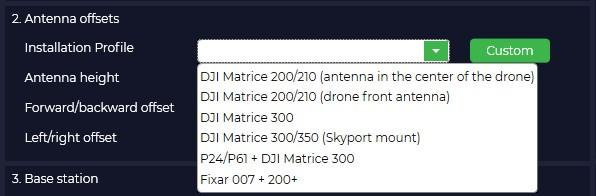
The offsets will be loaded from the library automatically. Note that if you have selected the AERIAL setting type, the presets for TERRESTRIAL are not displayed.
- If your offsets differ from the standard ones, you should click the "Add" button and enter your values.
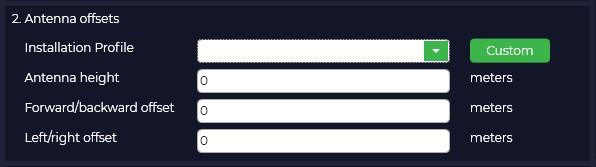
-
If the IMU center is located behind, below and to the right of the GNSS antenna in the direction of travel, then at the post-processing stage the offset values are specified in TOPODRONE Post Processing software as positive values (without sign -) in meters. If the IMU center is located in front, above and to the left of the GNSS antenna in the course of movement, then at the post-processing stage the offset values are specified in TOPODRONE Post Processing software as negative values (with sign -) in meters. in meters.
The PARENT parameter is responsible for allowing the program to understand how the sensor was positioned during the scan. DJI Matrice 300 - sensor forward, P24/P61 + DJI Matrice 300 - sensor backward.

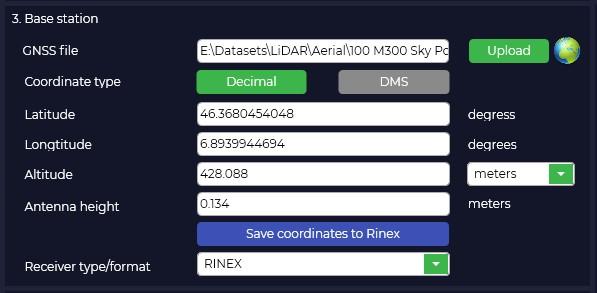
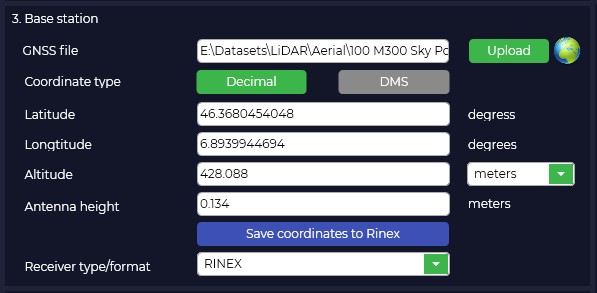
- Load the base station file in the "Base station" window in the "GNSS file" field.
When you download the measurement file of the base station in RINEX format, ephemeris will be automatically downloaded, you can download ephemeris from the TOPODRONE receiver that is installed in your laser scanner or downloaded separately.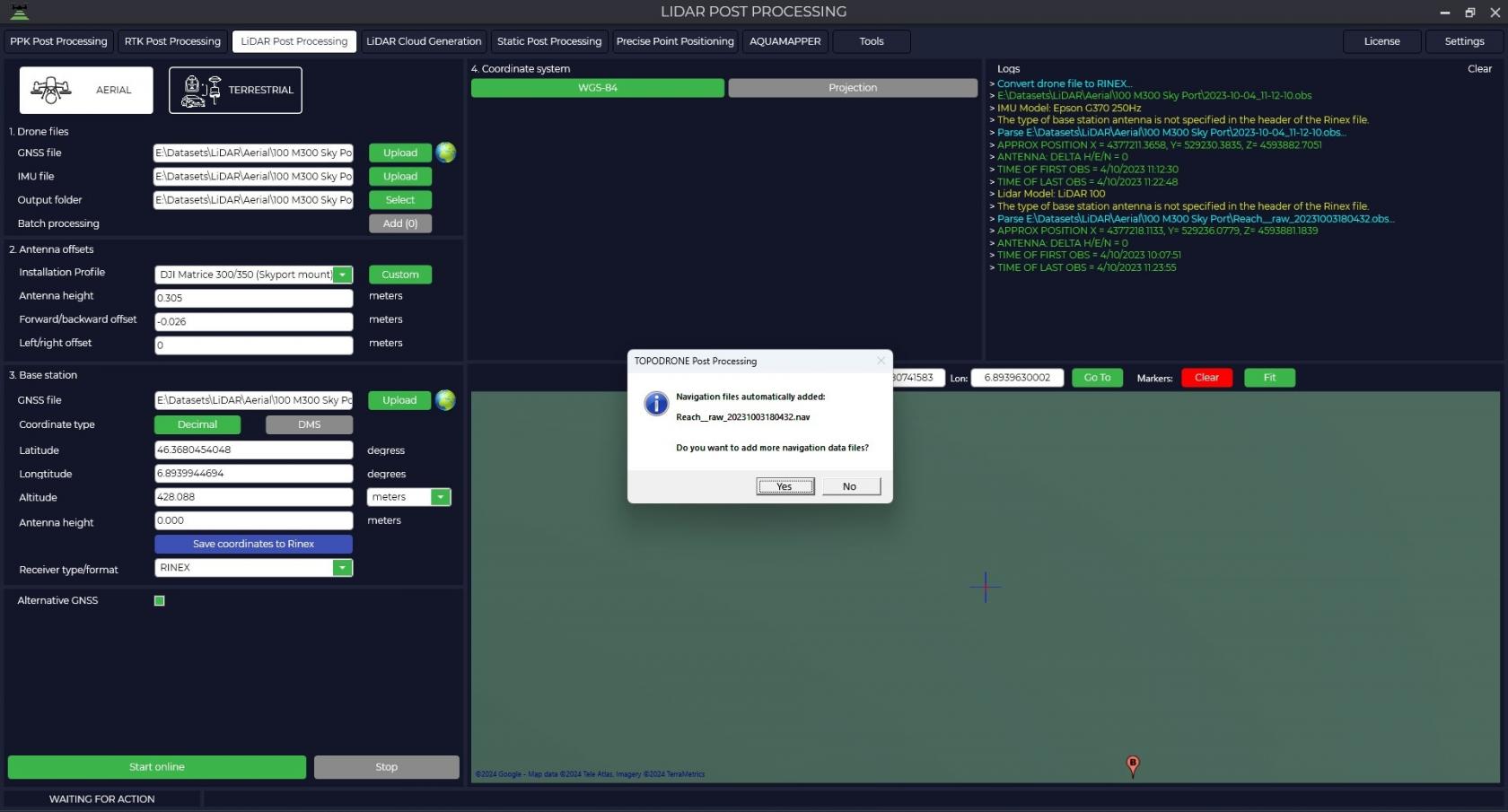
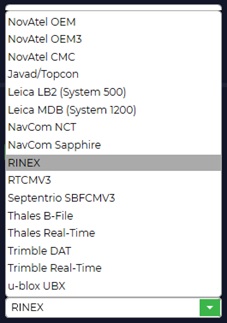
- From the drop-down list of receivers it is necessary to select the one that supports TOPODRONE Post Processing
TOPODRONE Post Processing program supports downloading data from different types of receivers, and if your receiver is not in the list, you can always convert the file to the universal RINEX format.

- Specify the high-precision coordinates of the base station.
Coordinates of the base station should be specified in the format latitude, longitude, height above the ellipsoid of the WGS 84 system.
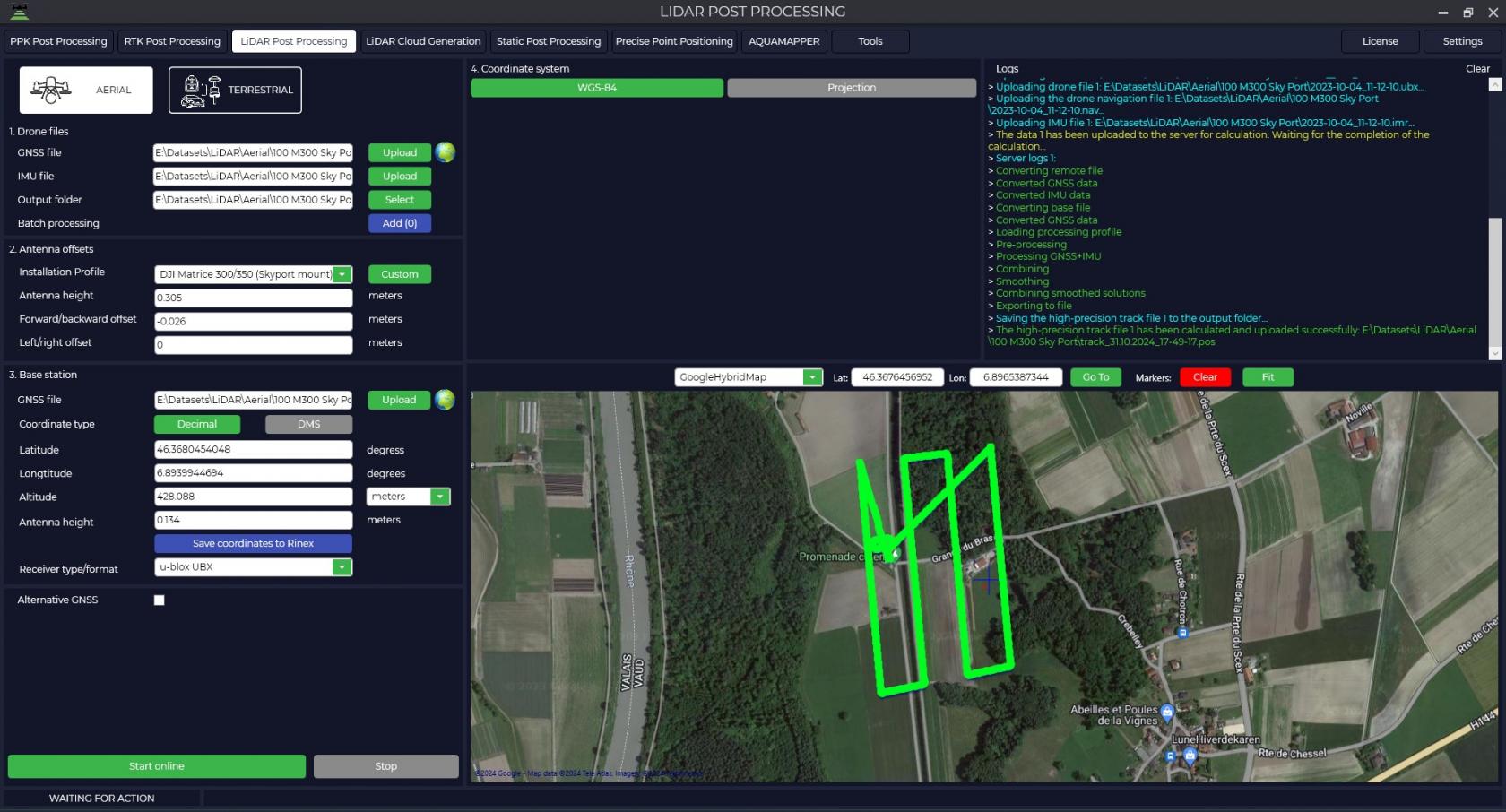
- Start processing by clicking the "Start Online" button.
Once processing starts, the data is uploaded to our server, where the trajectory is jointly processed using GNSS and IMU data. For correct processing you must have stable internet without interruptions, if there is a failure at the data upload stage, the processing stage will need to be restarted.
The "Alternative GNSS" checkbox allows you to get additionally the trajectory processed on your computer, possibly with a better solution quality.
-
At the end of processing the file with the high precision trajectory will be downloaded to your computer and in the map window you will be able to see the trajectory and the accuracy with which it was obtained. Green color means that the trajectory was processed with a fixed solution, yellow with a floating solution, and red color will tell us that with an offline solution. The trajectory file itself will be located in the default folder or in the folder you specified.



{kind=link}
No Comments