LiDAR Post Processing
This module allows to calculate the trajectory of the laser scanner together with the inertial system data on the server solution of TOPODRONE company, thus not burdening the user's computer.
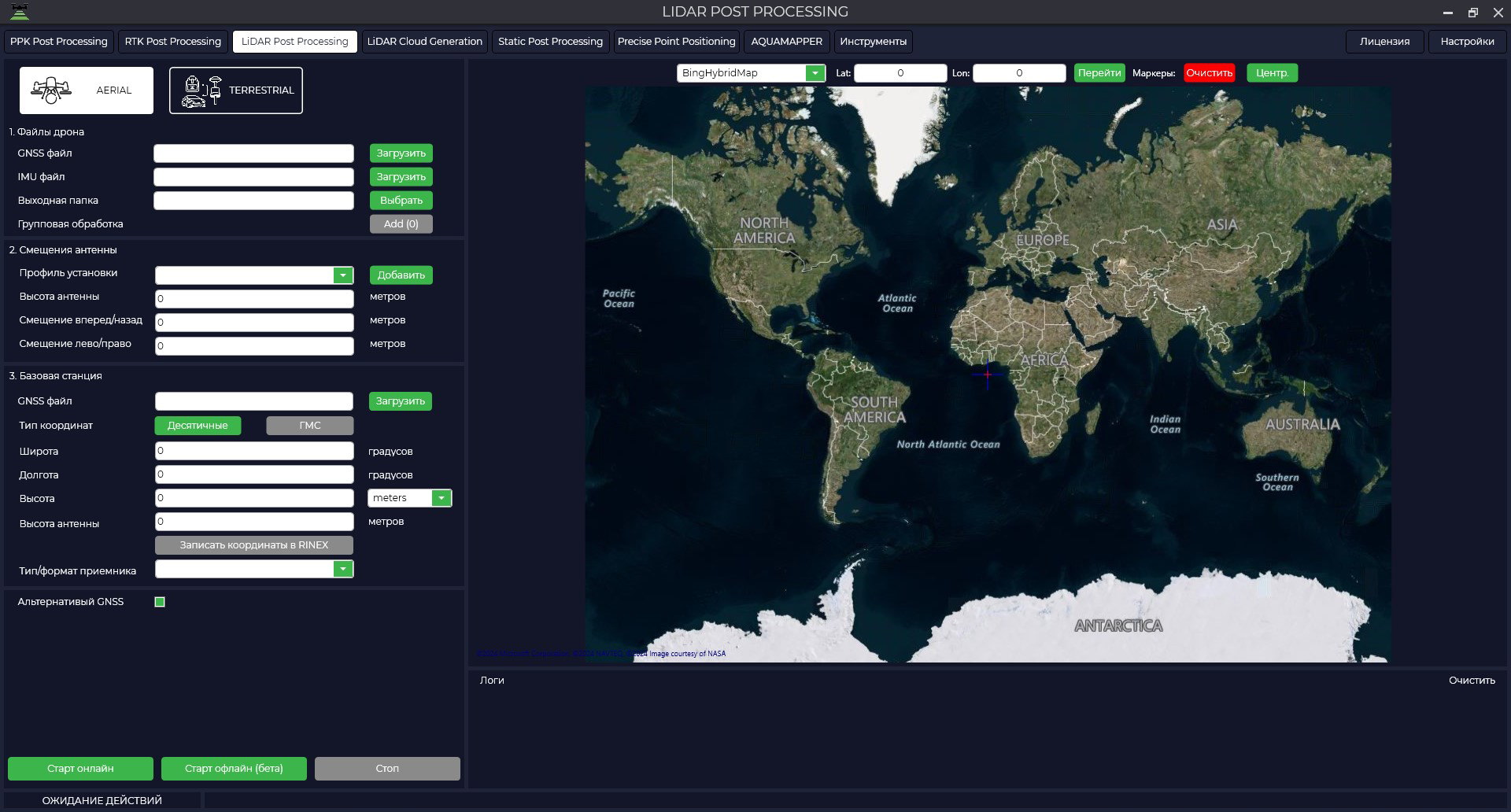
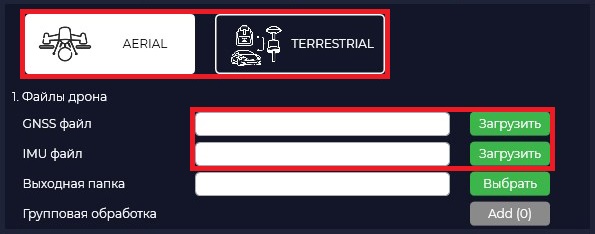
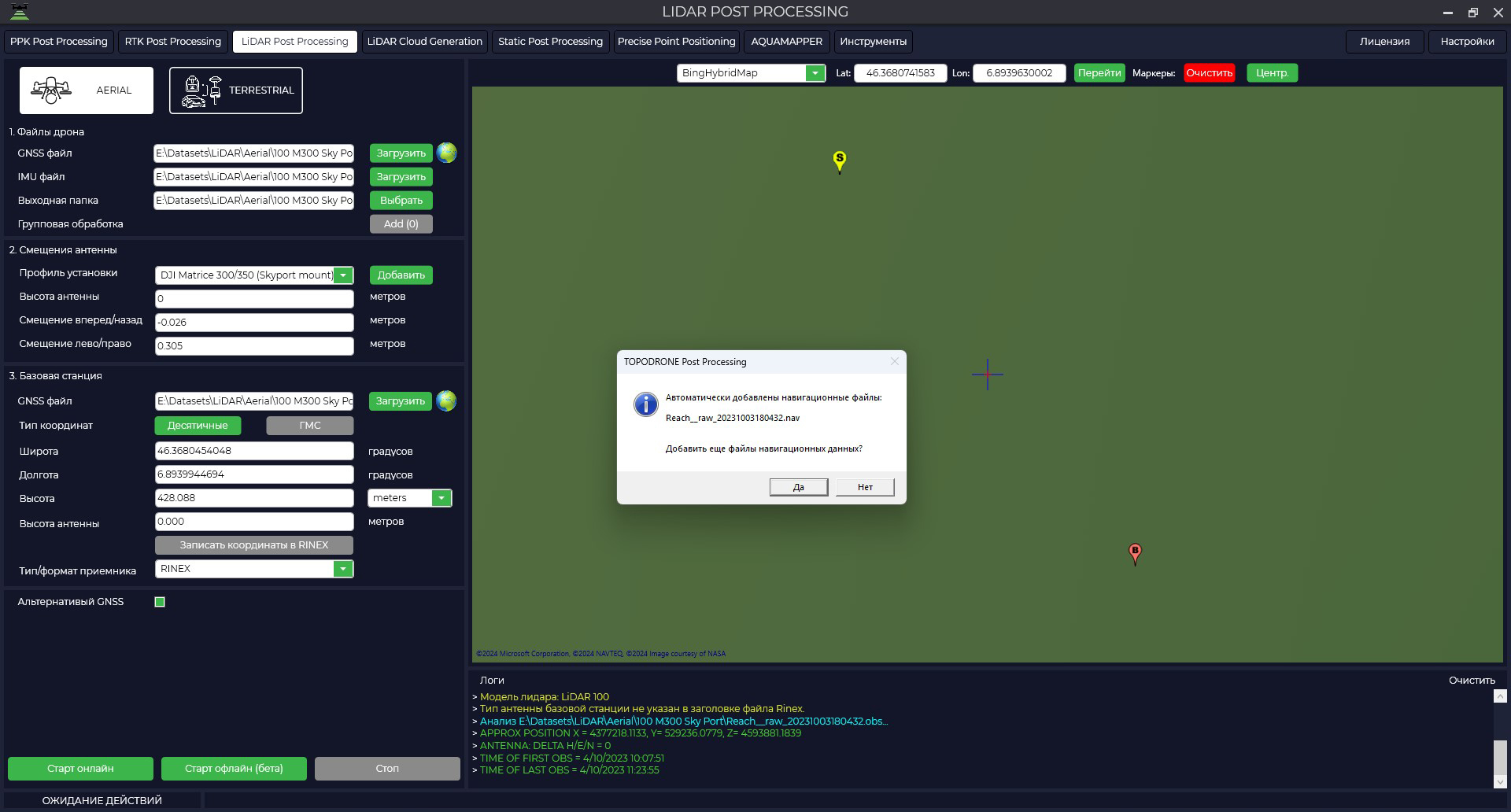
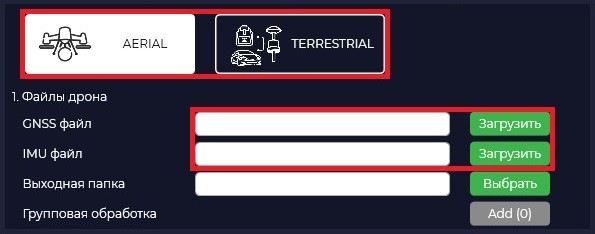
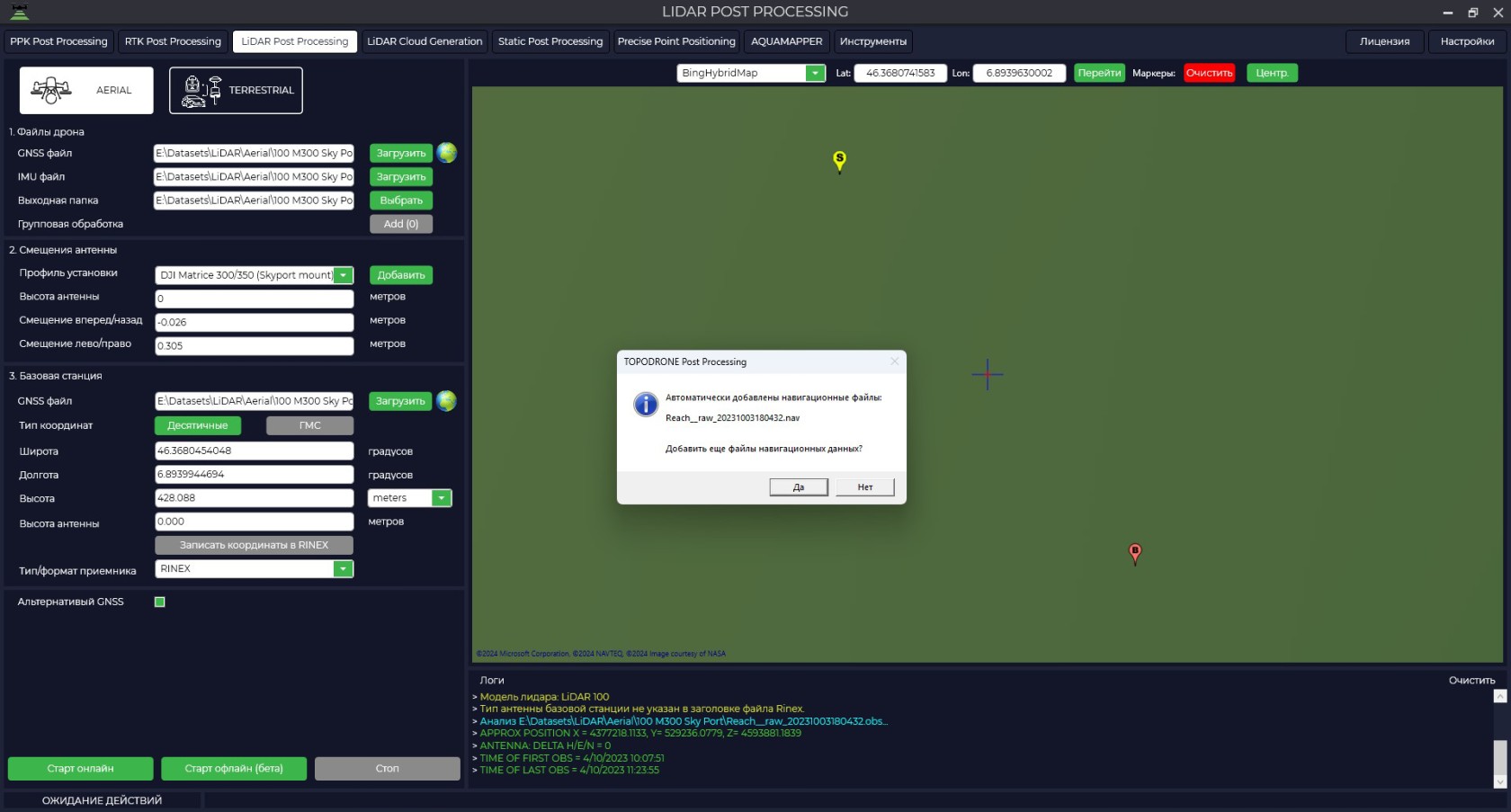
- In order to start processing it is necessary to start the TOPODRONE Post Processing program and go to the LiDAR Post Processing tab.
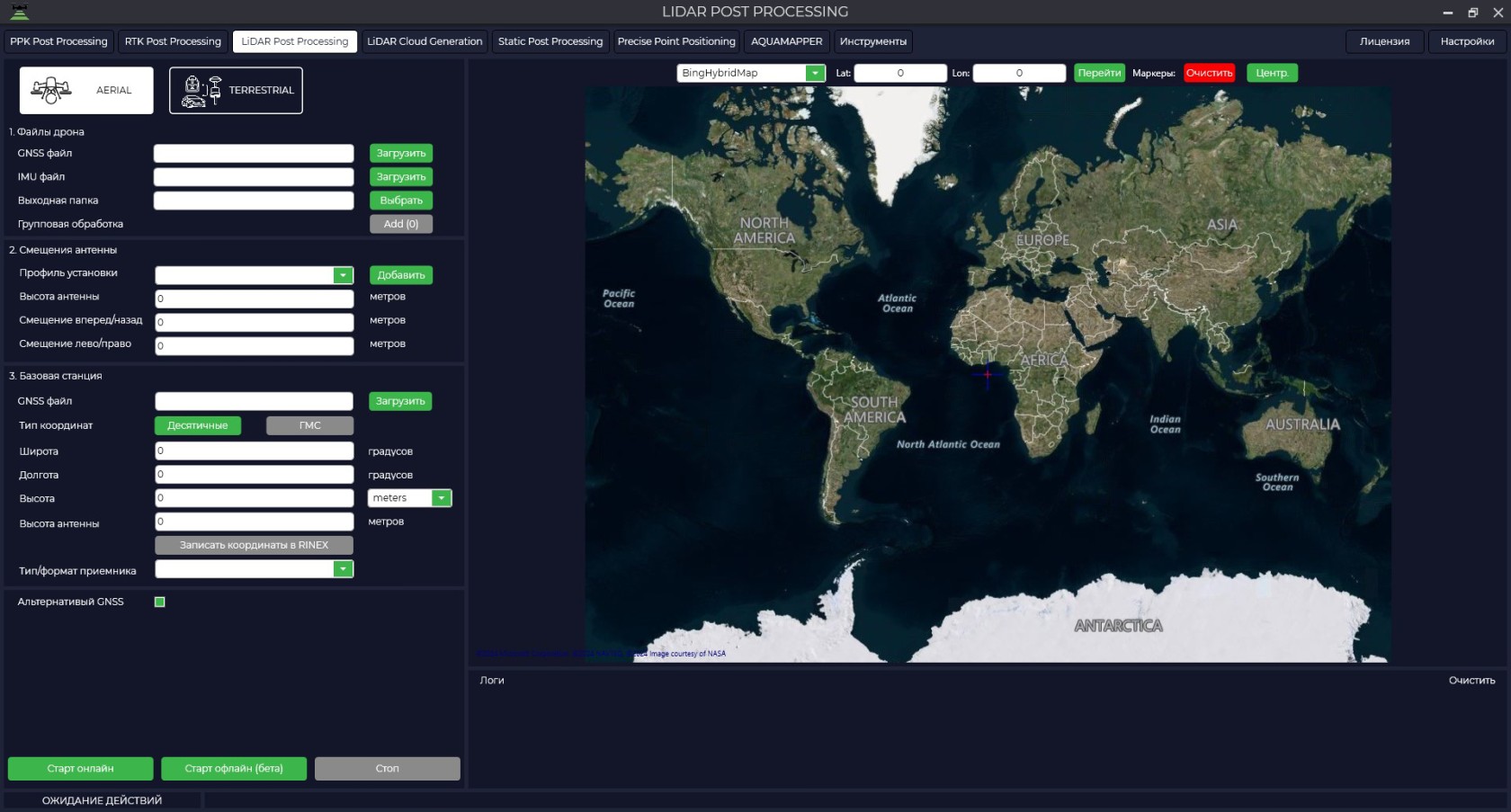
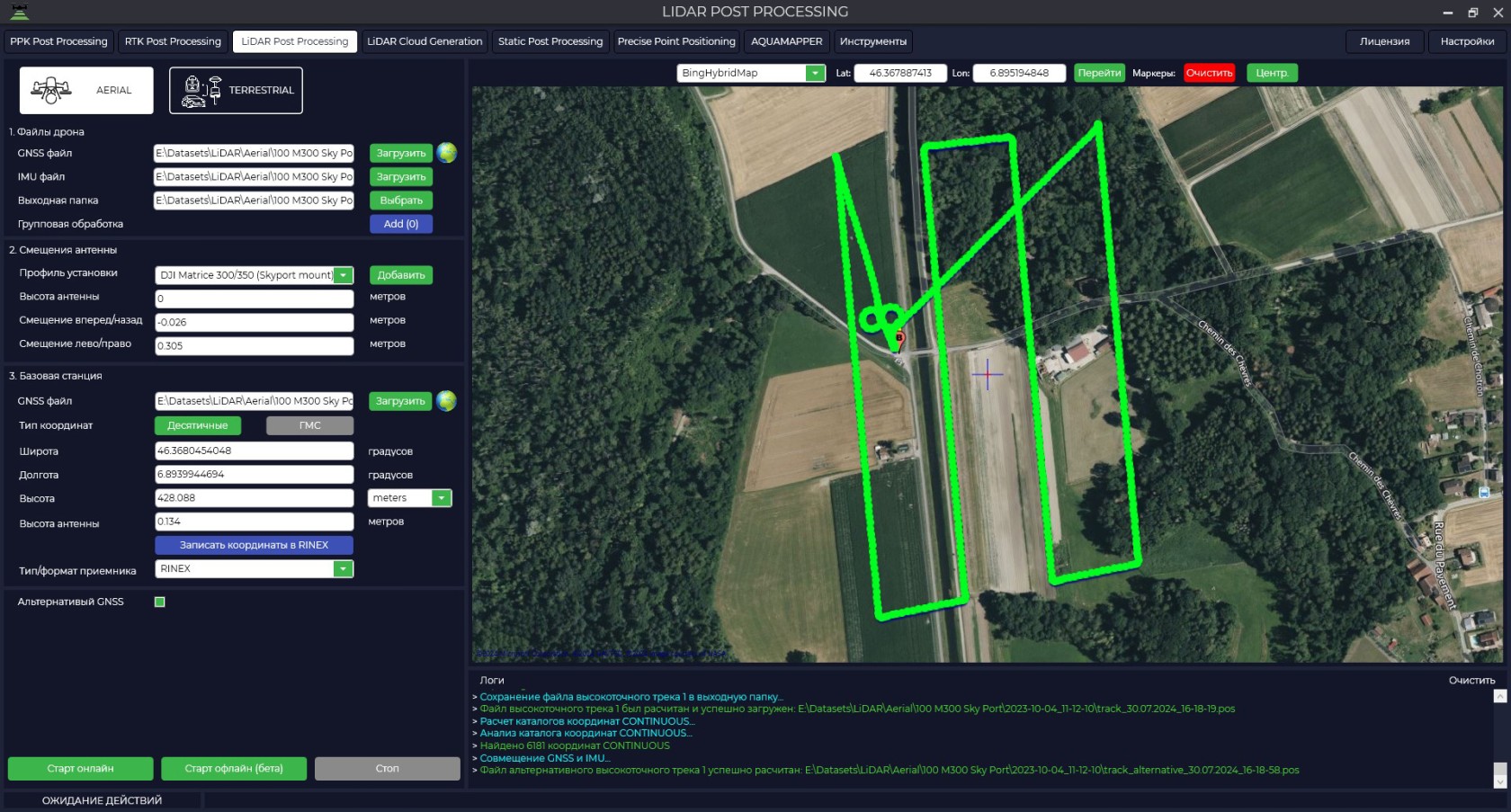
- Specify the installation type and path to the laser scanner files in the "GNSS file" field. Inertial data file will be loaded automatically in the "IMU file" field. Also by default the data will be saved to the source folder, but you can change the saving location in the "Output folder" field.
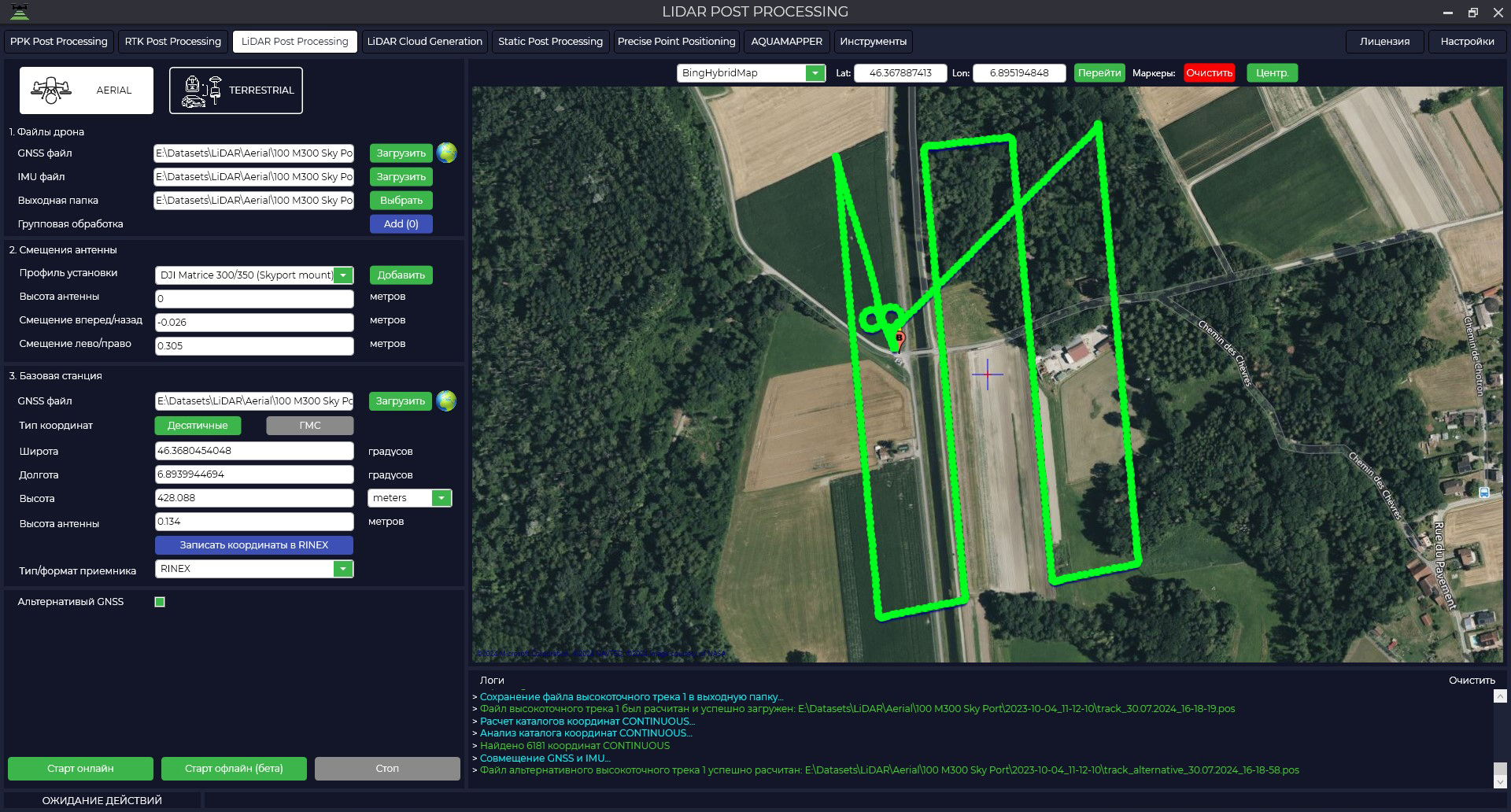
The "Logs" window displays all information on the downloaded files: type of scanner used, type of inertial system used, start/end time of file recording on the scanner and base station, as well as all information on data processing.

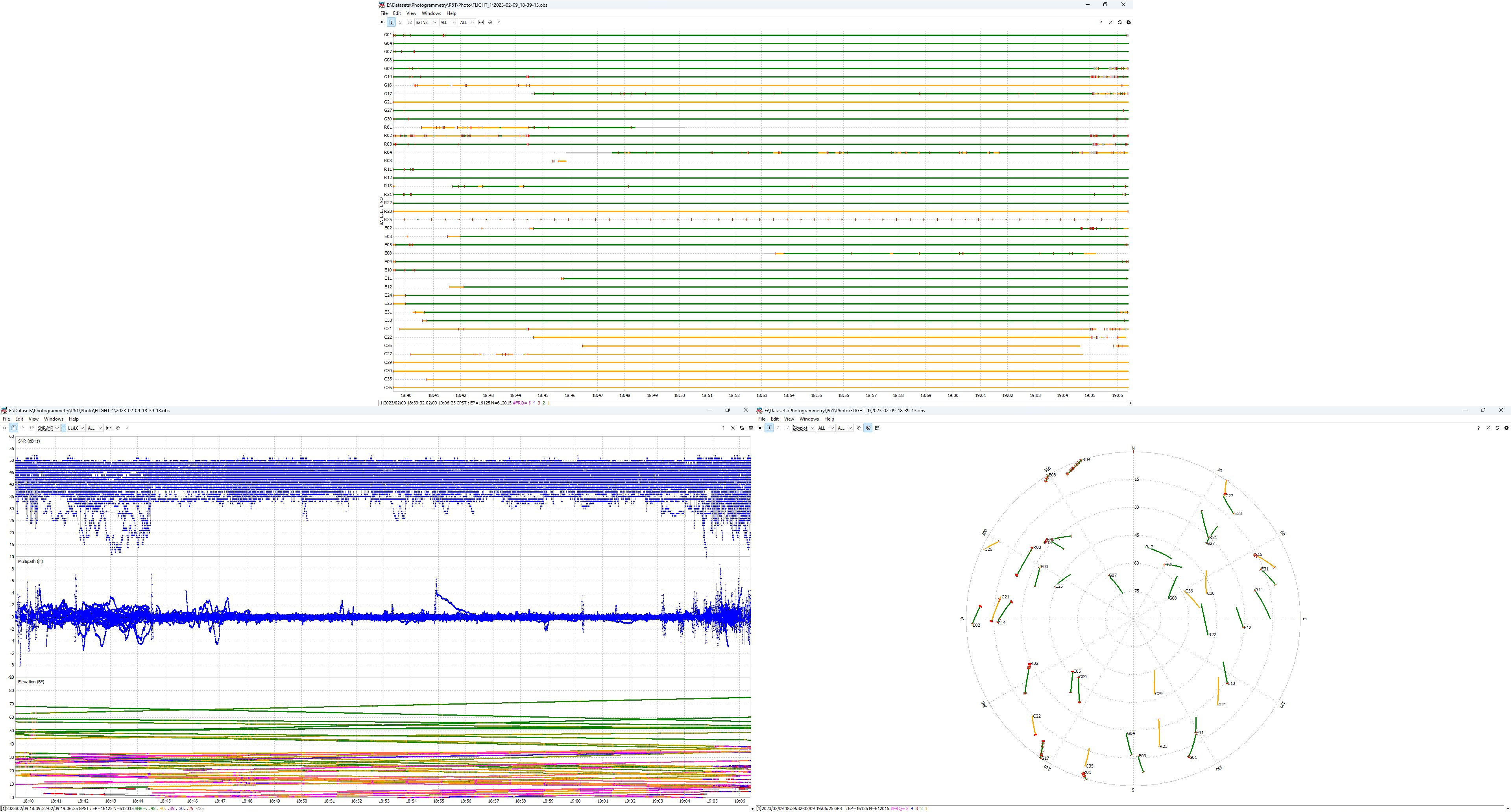
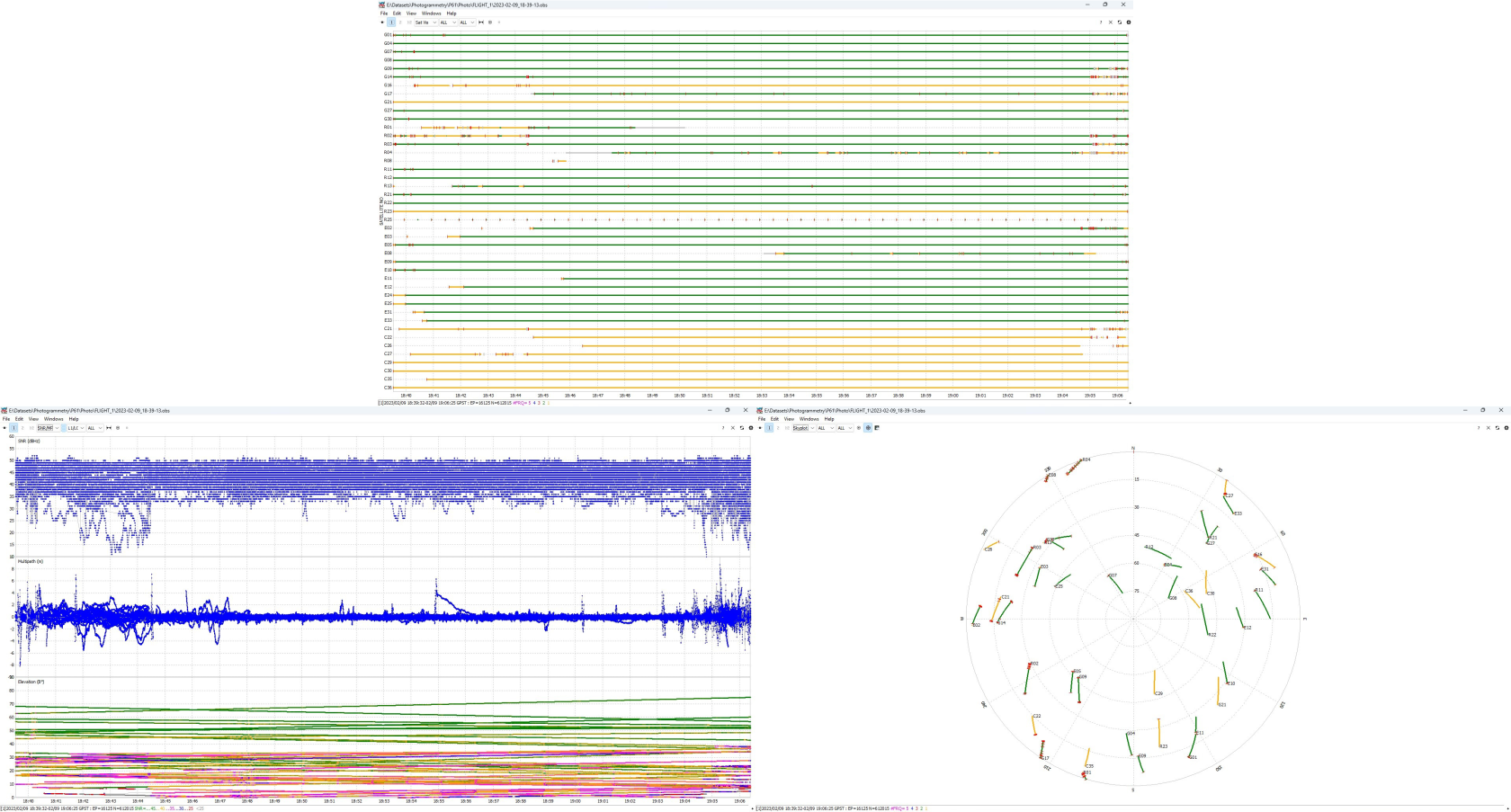
- By pressing the  button you can analyze the quality of the data.
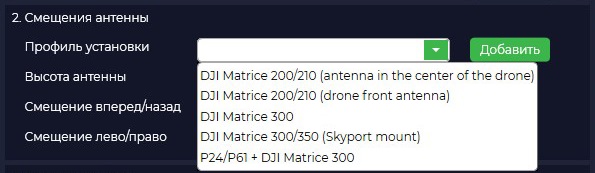
- Select your equipment model from the drop-down list.
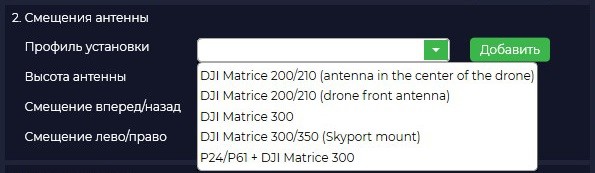
The offsets will be loaded from the library automatically. Note that if you have selected the AERIAL setting type, the presets for TERRESTRIAL are not displayed.
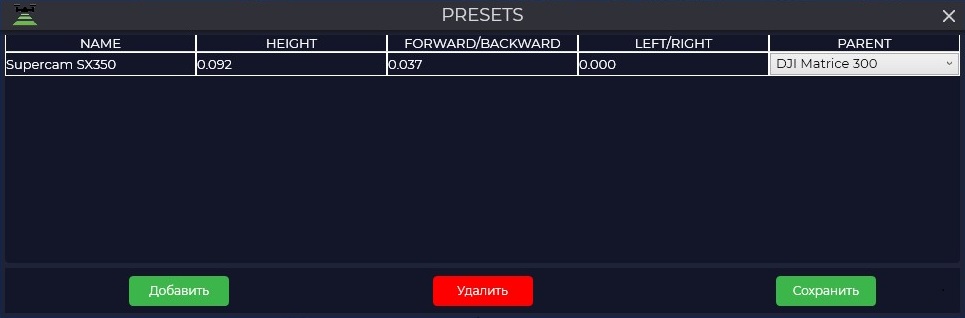
- If your offsets differ from the standard ones, you should click the "Add" button and enter your values.
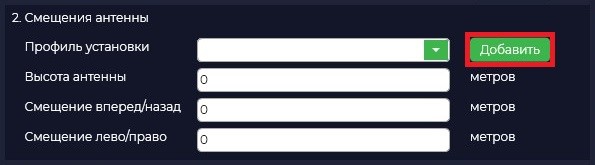
ЕслицентрIf the IMU
располагаетсяcenterсзади,isнижеlocatedиbehind,правееbelowГНССandантенныtoпоtheходуrightдвижения,ofтоtheнаGNSSэтапеantennaпостобработкиinзначенияtheсмещенийdirectionуказываютсяofвtravel,ПОthen at the post-processing stage the offset values are specified in TOPODRONE Post Processingкакsoftwareположительныеasзначенияpositive values (безwithoutзнакаsign -)вinметрах.Еслиmeters.центрIf the IMUрасполагаетсяcenterспереди,isвышеlocatedиinлевееfront,ГНССaboveантенныandпоtoходуtheдвижения,leftтоofнаtheэтапеGNSSпостобработкиantennaзначенияinсмещенийtheуказываютсяcourseвofПОmovement, then at the post-processing stage the offset values are specified in TOPODRONE Post Processingкакsoftwareотрицательныеasзначенияnegative values (соwithзнакомsign -)вinметрах.вmeters.метрах.in meters.
ПараметрThe PARENTотвечаетparameterзаisто,responsibleчтобыforпрограммаallowingмоглаtheпонятьprogramкакимtoобразомunderstandбылhowустановленtheсенсорsensorвоwasвремяpositionedсканирования.during the scan. DJI Matrice 300 -сенсоромsensorвперед,forward, P24/P61 + DJI Matrice 300 -сенсоромsensorназад.backward.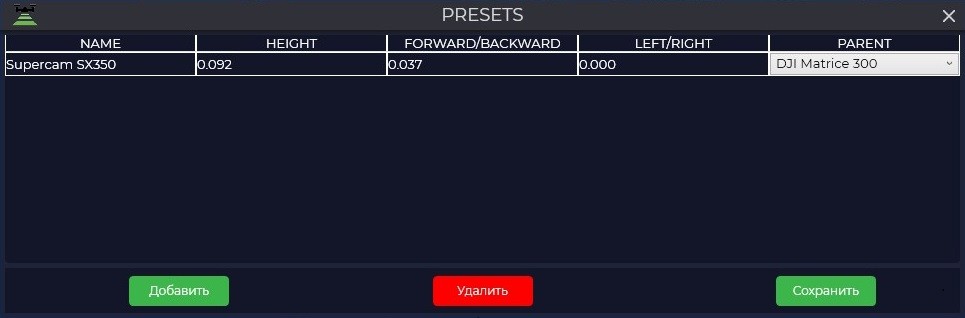
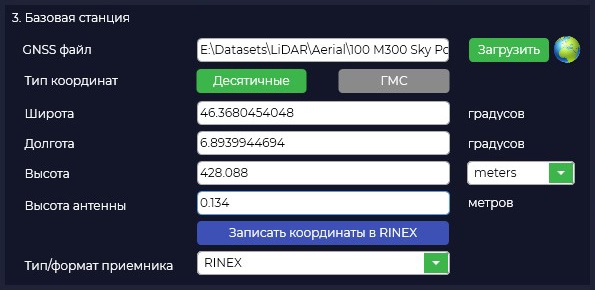
ЗагрузитеLoadфайлtheбазовойbaseстанцииstationвfileокнеin«Базоваяtheстанция»"Baseвstation"полеwindow«in the "GNSSфаил».file" field.
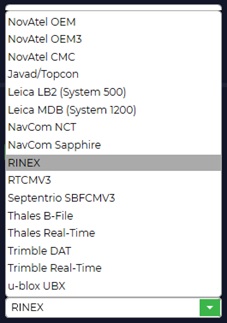
ПриWhenзагрузкеyouфайлаdownloadизмеренийtheбазовойmeasurementстанцииfileвofформатеthe base station in RINEXавтоматическиformat,будутephemerisзагруженыwillэфемериды,beприautomaticallyэтомdownloaded,выyouможетеcanзагрузитьdownloadэфемеридыephemerisсfromприемникаthe TOPODRONEкоторыйreceiverустановленthatвisВашемinstalledлазерномinсканереyourилиlaserскаченныеscannerотдельно.or downloaded separately.ИзFromвыпадающегоtheспискаdrop-downприемниковlistнеобходимоofвыбратьreceiversтотitкоторыйisподдерживаетnecessary to select the one that supports TOPODRONE Post Processing
ПрограммаTOPODRONE Post Processingподдерживаетprogramзагрузкуsupportsданныхdownloadingсdataразныхfromтиповdifferentприемников,typesприofэтомreceivers,еслиandВашегоifприемникаyourнетreceiverвisсписке,notВыinвсегдаtheможетеlist,выполнитьyouконвертациюcanфайлаalwaysвconvertуниверсальныйtheформатfileRINEX.to the universal RINEX format.
УкажитеSpecifyвысокоточныеtheкоординатыhigh-precisionбазовойcoordinatesстанции.of the base station.
КоординатыCoordinatesбазовойofстанцииtheнеобходимоbaseуказатьstationвshouldформатеbeширота,specifiedдолгота,inвысотаtheнадformatэллипсоидомlatitude,системыlongitude, height above the ellipsoid of the WGS84.84 system.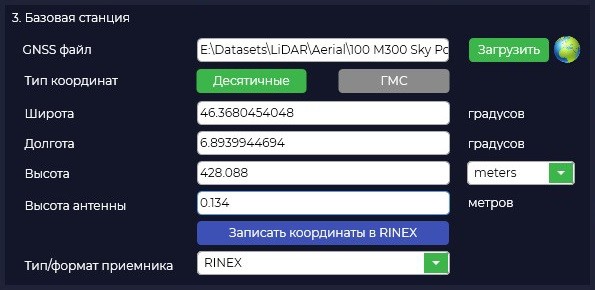
ЗапуститеStartобработкуprocessingнажавbyкнопкуclicking«Стартtheонлайн»."Start Online" button.
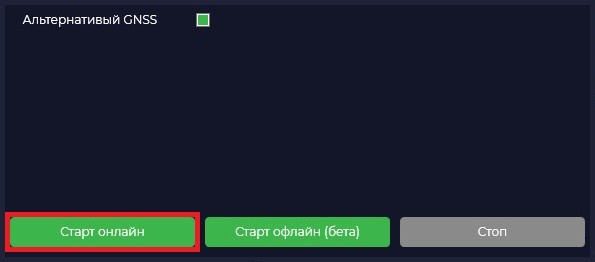
ПослеOnceначалаprocessingобработкиstarts,данныеtheзагружаютсяdataнаisнашuploadedсервер,toгдеourпроисходитserver,совместнаяwhereобработкаtheтраекторииtrajectoryпоisданнымjointlyГНССprocessedиusingIMU.GNSSДляandкорректнойIMUобработкиdata.уForВасcorrectдолженprocessingбытьyouстабильныйmustинтернетhaveбезstableобрывов,internetеслиwithoutнаinterruptions,этапеifзагрузкиthereданныхisпроизойдетaсбой,failureтоatэтапtheобработкиdataнужноuploadбудетstage,запуститьtheповторно.processing stage will need to be restarted.ГалочкаThe "АльтернативныйAlternative GNSS"позволяетcheckboxполучитьallowsдополнительноyouтраекторииtoобработаннуюgetнаadditionallyвашемtheкомпьютере,trajectoryвозможноprocessedсonболееyourлучшимcomputer,качествомpossiblyрешения.with a better solution quality.ПоитогуAt
обработкиtheфайлendсofвысокоточнойprocessingтраекториейtheбудетfileзагруженwithнаtheВашhighкомпьютерprecisionиtrajectoryвwillокнеbeкартыdownloadedвыtoсможетеyourувидетьcomputerтраекториюandиinточность,theсmapкоторойwindowонаyouбылаwillполучена.beЗеленыйableцветtoозначает,seeчтоtheтраекторияtrajectoryбылаandобработанаtheсaccuracyфиксированнымwithрешением,whichжелтыйitсwasплавающимobtained.решением,Greenаcolorкрасныйmeansцветthatсообщитtheнам,trajectoryчтоwasсprocessedавтономнымwithрешением.aСамfixedфайлsolution,траекторииyellowбудетwithнаходитьсяaвfloatingпапкеsolution,поandумолчаниюredилиcolorвwillтойtellпапке,usкоторуюthatвыwithуказали.an offline solution. The trajectory file itself will be located in the default folder or in the folder you specified.