
Lidar scanning
ВIn данномthis разделеsection программыof можноthe настроитьprogram параметрыyou дляcan высокоточнойconfigure обработкиparameters траектории,for генерацииhigh-precision облакаtrajectory точекprocessing, вpoint томcloud числеgeneration поincluding технологиюTOPOSLAM TOPOSLAM.technology.
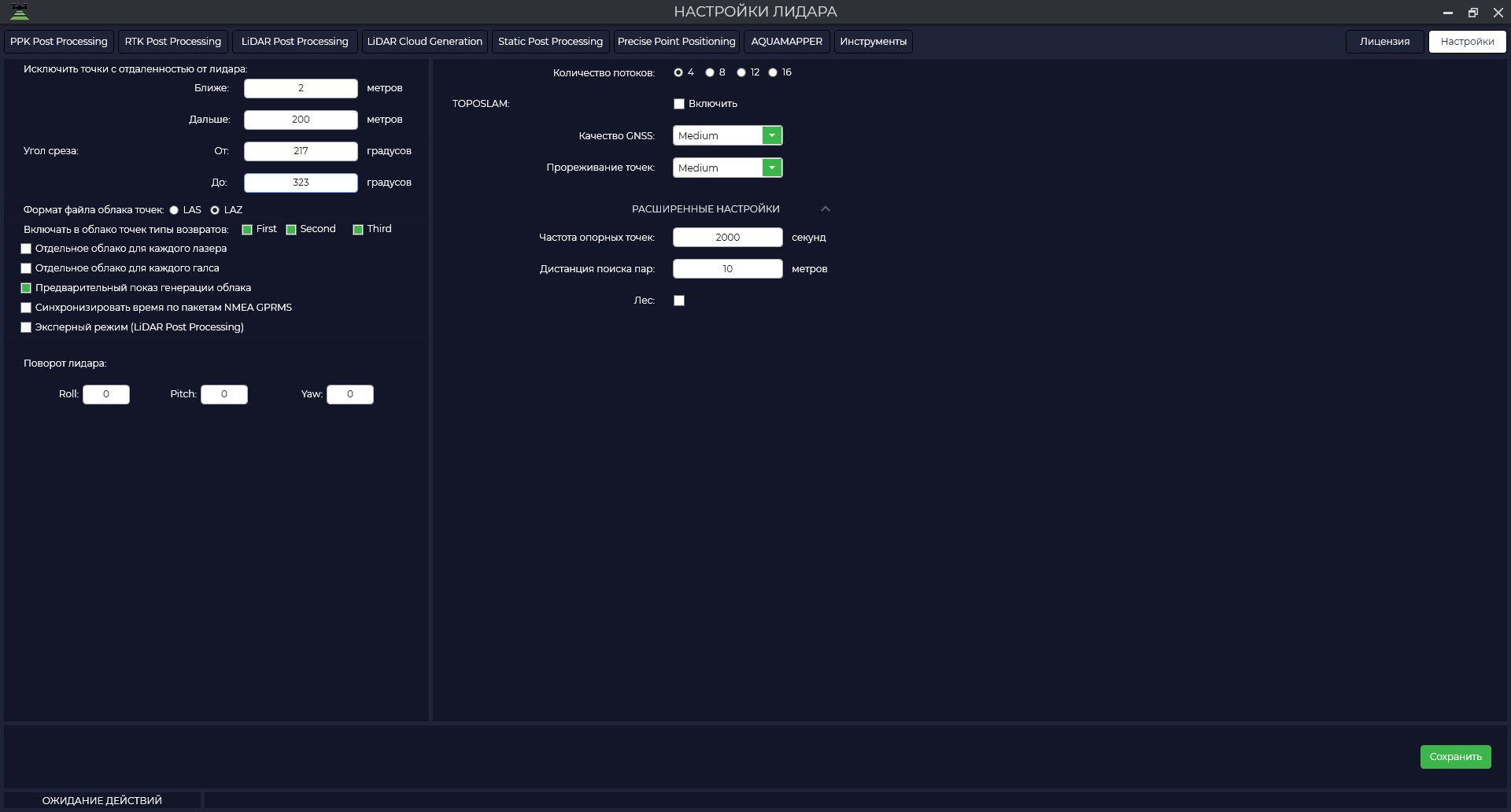 To do this, go to the "Settings" tab, and then select "Lidar scanning" and in the window that appears, configure the processing parameters.
To do this, go to the "Settings" tab, and then select "Lidar scanning" and in the window that appears, configure the processing parameters.Для этого необходимо перейти к вкладке «Настройки», а затем выбрать пункт «Лидарное сканирование» и в появившемся окне настроить параметры обработки.
|
|
|

СинхронизироватьSynchronize времяtime по пакетамby NMEA GPRMC –packets -
ЭкспертныйExpert режимmode (LiDAR Post Processing) –is этоa режим,mode которыйthat позволяетallows указатьyou вручнуюto типmanually используемогоspecify сенсораthe иtype IMU.of sensor and IMU to be used.

TOPOSLAM предназначенis дляdesigned корректировкиto облакаcorrect точекthe приpoint недостаточноcloud хорошемwhen сигналеthe GPS.GPS Вsignal настоящееis времяnot good enough. Currently TOPOSLAM поддерживаетonly толькоsupports наземноеground сканирование. scanning.

КоличествоNumber потоков.of Укажитеstreams. количествоSpecify потоковthe процессора,number которыеof выprocessor хотелиthreads быyou задействоватьwould дляlike ускоренияto обработкиutilize данныхto поaccelerate технологииSLAM SLAM.processing.
ДляTo активацииactivate алгоритмаthe TOPOSLAM необходимоalgorithm, поставитьyou флажокmust напротивcheck соответствующейthe опцииcorresponding "Включить".Enable" option.
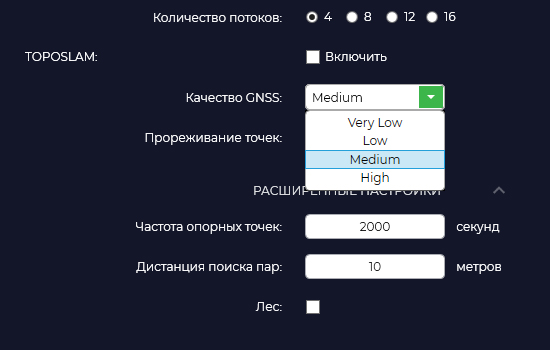
КачествоGPS signal quality. Depending on the quality of GPS сигнала.track Вyou зависимостиshould отselect качестваthe GPSappropriate трека необходимо выбрать соответствующую вкладку.tab. Low –- плавающееfloating решениеsolution болееmore than 70%, Medium –- плавающееfloating решениеsolution болееmore than 50%, High –- плавающееfloating решениеsolution болееmore than 20%. ПриIf низкомthe качествеquality программаis разбиваетlow, трекthe наprogram болееsplits мелкиеthe сегментыtrack дляinto ихsmaller дальнейшегоsegments взаимногоfor сопоставления.their further mutual comparison.
ПрореживаниеPoint точек.thinning. ФункцияSegment пропускаskipping сегментов.function. Off –- неdo пропускать,not skip, Low –- пропускатьskip одинone сегментsegment послеafter каждогоeach сгенерированногоgenerated сегмента,segment, Medium –- пропускатьskip дваtwo сегмента,segments, High - пропускатьskip четыреfour сегмента.segments. ФункцияThis предназначенаfunction дляis ускоренияdesigned процессаto обработкиspeed иup приthe нехваткиprocessing оперативнойprocess памятиand дляin большихcase съемок.of RAM shortage for large shootings.

ЧастотаFrequency опорныхof точек.reference points.
ДистанцияDistance поискаsearch пар.for pairs.
Лес.Forest.
