
Lidar scanning
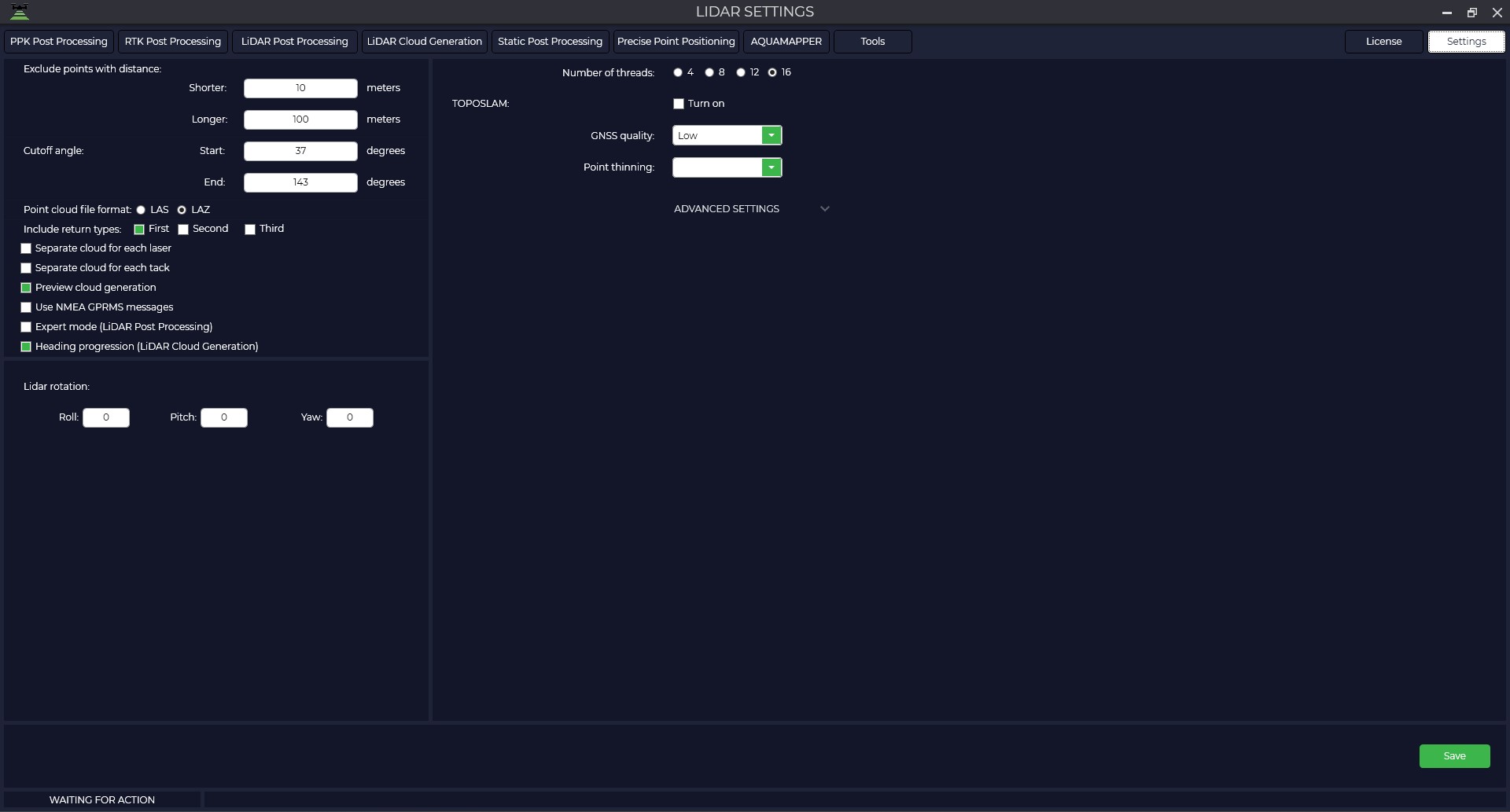
In this section of the program you can configure parameters for high-precision trajectory processing, point cloud generation including TOPOSLAM technology.
|
|
Exclude points with distance from lidar Closer is the distance to disregard when generating the point cloud. Cut angle: Specify the start and end angle of the LiDAR scan. Include return types in the point cloud - select the number of reflections you need or the number that your hardware supports. Preview cloud generation - view point cloud generation in real time |
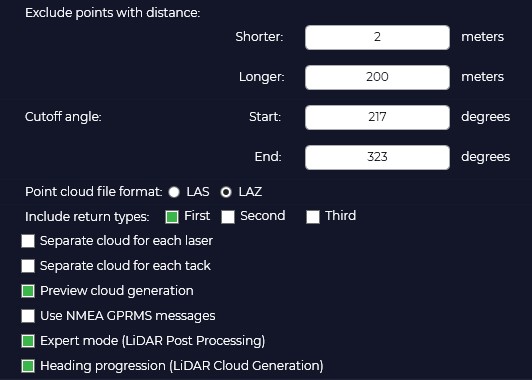
Synchronize time by NMEA GPRMC packets -
Expert mode (LiDAR Post Processing) is a mode that allows you to manually specify the type of sensor and IMU to be used.
TOPOSLAM is designed to correct the point cloud when the GPS signal is not good enough. Currently TOPOSLAM only supports ground scanning.
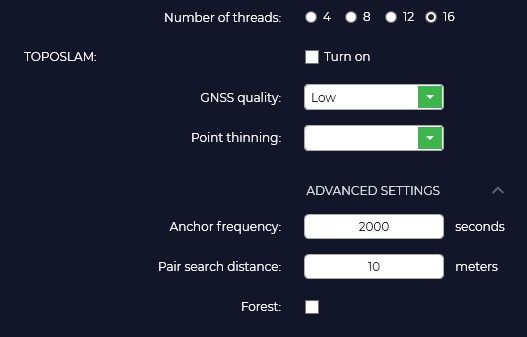
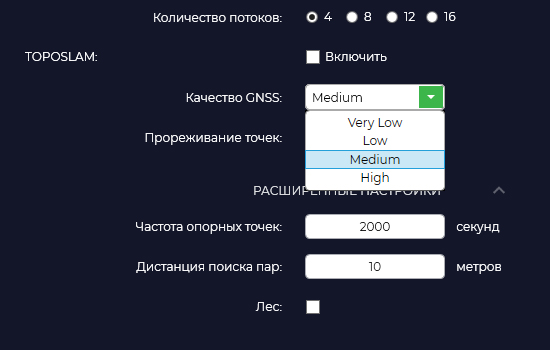
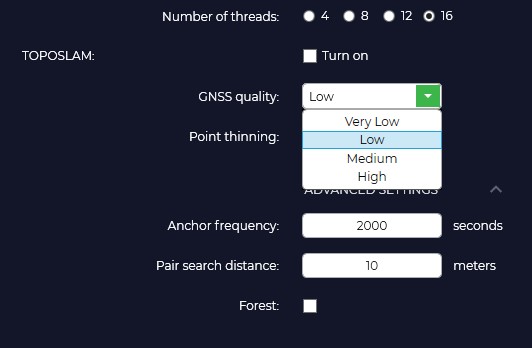
Number of streams. Specify the number of processor threads you would like to utilize to accelerate SLAM processing.
To activate the TOPOSLAM algorithm, you must check the corresponding "Enable" option.
GPS signal quality. Depending on the quality of GPS track you should select the appropriate tab. Low - floating solution more than 70%, Medium - floating solution more than 50%, High - floating solution more than 20%. If the quality is low, the program splits the track into smaller segments for their further mutual comparison.
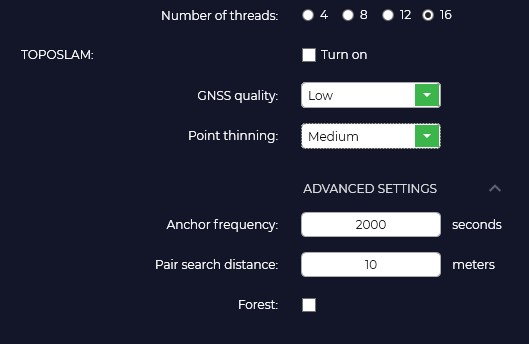
Point thinning. Segment skipping function. Off - do not skip, Low - skip one segment after each generated segment, Medium - skip two segments, High - skip four segments. This function is designed to speed up the processing process and in case of RAM shortage for large shootings.
Frequency of reference points.
Distance search for pairs.
Forest.
No Comments