
Mobile Laser Scanning (MLS)
The TOPODRONE LiDAR is designed to perform mobile laser scanning (MLS). This process requires a minimum number of permits to conduct field work. You will not need to obtain a flight permit, avoid airspace restrictions, and minimize the risk of equipment damage in the event of a drone drop.
Mobile laser scanning can be done in two ways: using the TOPODRONE backpack or the TOPODRONE mobile car mount. The TOPODRONE backpack allows you to place the TOPODRONE LiDAR together with the external GNSS antenna and power supply on the operator. To achieve more accurate results when using the TOPODRONE backpack, it is recommended to use a vehicle such as an ATV, electric scooter or gyroscooter.
When scanning with the TOPODRONE backpack, the operator should walk with a steady gait, minimizing vertical and lateral oscillations. The main objective is to maintain a constant speed and minimize vibrations.
The main steps in performing mobile laser scanning:
- Preparing and mounting the equipment on a backpack or mobile mount.
- Switching on and setting up the TOPODRONE LiDAR and going through initialization (GNSS signal is required).
- Performing the calibration maneuver (moving along the infinity or forward-backward trajectory).
- Passages with TOPODRONE LiDAR along the main survey area.
- When performing long sessions (more than 30 minutes) it is recommended to perform additional calibration maneuvers every 30 minutes without turning off the TOPODRONE LiDAR to improve the quality of the result.
- Data downloading and/or turn off the TOPODRONE LiDAR.
General recommendations for mobile laser scanning:
- Before starting scanning, check the cutoff angles of the TOPODRONE LiDAR as indicated in the corresponding section of the manual.
- It is necessary to have a base station file that includes all the operating time of the TOPODRONE LiDAR.
- Сигнал GNSS должен быть стабильным и качественным на протяжении всей траектории сканирования. Для обработки данных в программе TOPODRONE Post Processing требуется качественный сигнал GNSS.
- При использовании фильтра TopoSLAM GNSS-сигнал должен быть высокого качества как при калибровке лазерного сканера TOPODRONE, так и при съемке для корректной последующей калибровки углов смещения.
- При движении с лазерным сканером TOPODRONE старайтесь поддерживать стабильную скорость без резких маневров и рывков. Оптимальная скорость для достижения наилучших результатов составляет от 10 до 60 км/ч.
- При использовании автомобильного крепления рекомендуется применять автомобили с функцией круиз-контроля для поддержания стабильной скорости. Мягкая подвеска автомобиля, круиз-контроль и ровная дорога помогут минимизировать вибрации для достижения лучших результатов.
- Неровные дороги, рывки, хаотичные повороты, вибрации двигателя и жесткая подвеска, а также временная потеря сигнала GNSS могут ухудшить качество получаемых данных.
- Продолжительность сессий сканирования не рекомендуется более 30 минут, так как длительные сессии могут значительно увеличить время постобработки и ухудшить качество результатов. В случае необходимости, рекомендуется разделить большую зону съемки на участки, которые можно сканировать за 30 минут.
- Сканирование должно проводиться с обеих сторон объекта (спереди и сзади), как указано в схеме.
- Для повышения качества калибровки углов несоосности на этапе пост-обработки, рекомендуется наличие в месте съемки вертикальных объектов, таких как столбы, стены, заборы и т.п.
- Before starting scanning, check the cutoff angles of the TOPODRONE LiDAR as indicated in the corresponding section of the manual.
- It is necessary to have a base station file that includes all the operating time of the TOPODRONE LiDAR.
- The GNSS signal should be stable and of high quality during the whole scanning trajectory. A high quality GNSS signal is required for data processing in the TOPODRONE Post Processing program.
- When using the TopoSLAM filter, the GNSS signal must be of high quality both when calibrating the TOPODRONE LiDAR and when shooting for correct subsequent calibration of offset angles.
- When driving with the TOPODRONE LiDAR, try to maintain a stable speed without sudden maneuvers and jerks. The optimum speed for best results is between 10 and 60 km/h.
- When using the car mount, it is recommended to use cars with cruise control function to maintain a stable speed. Soft vehicle suspension, cruise control, and smooth roads will help minimize vibrations for best results.
- Uneven roads, jerky roads, erratic turns, engine vibrations and stiff suspension, as well as temporary loss of GNSS signal can degrade the quality of the data received.
-
The duration of scanning sessions is not recommended to be longer than 30 minutes, as long sessions can significantly increase post-processing time and degrade the quality of results. If necessary, it is recommended to divide a large shooting area into sections that can be scanned in 30 minutes.
-
Scanning should be done on both sides of the subject (front and back) as indicated in the diagram.
- To improve the quality of calibration of misalignment angles at the post-processing stage, it is recommended to have vertical objects such as poles, walls, fences, etc. at the survey location
Схемы траекторий мобильного лазерного сканирования:
|
|
|
| 1. Зоны работы лазерного сканера TOPODRONE | 2. Общий вид на траекторию оператора |
|
|
|
| 3. Отсекание скруглений на поворотах (этап постобработки) | 4. Получение параллельных сканов (этап постобработки) |
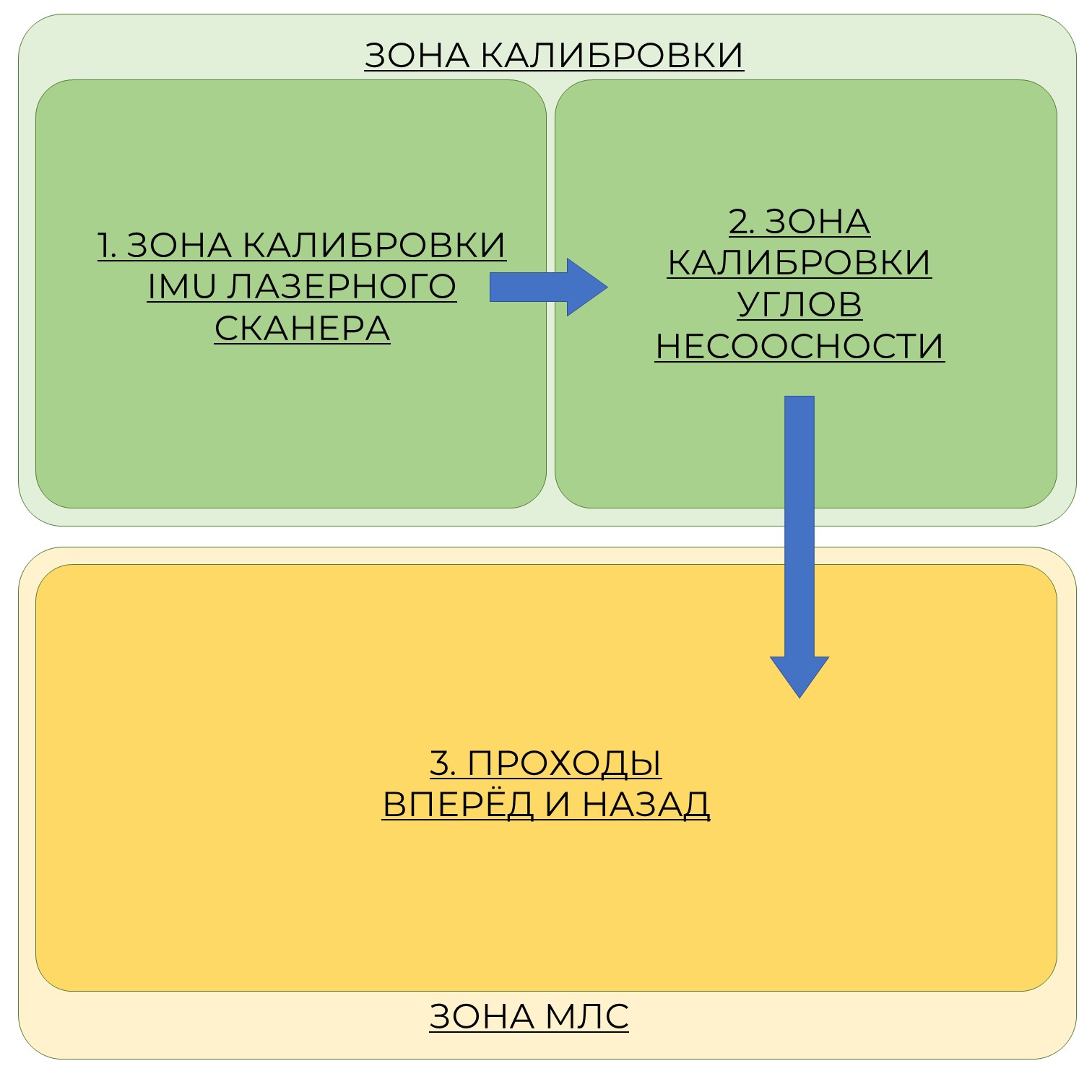
Мобильное лазерное сканирование условно разделяется на 2 этапа, на первом этапе мы выполняем калибровку лазерного сканера TOPODRONE, а на втором этапе мы выполняем сканирование объекта.
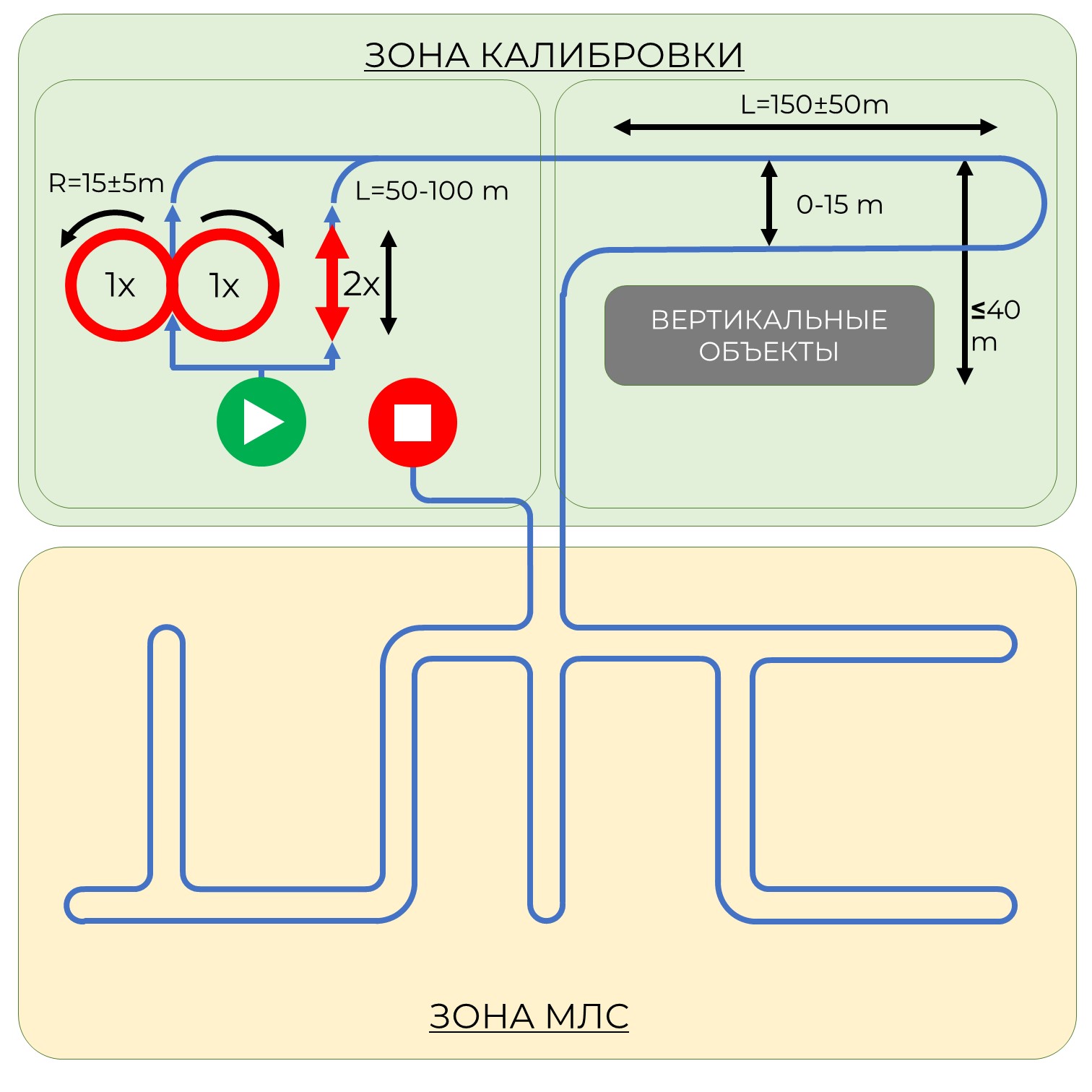
Выполните проезд с постоянной скоростью 20-30 км/ч вперед на дистанцию 50-100 метров с возвращением в исходную точку задним ходом с той же скоростью. Повторить данный этап 2-4 раза. Даный этап необходим для точного позиционирования лазерного сканера TOPODRONE в пространстве.
После завершения проездов, калибровка выполнена, можно приступать к выполнению основного задания.
После завершения проездов, калибровка выполнена, можно приступать к выполнению основного задания.
При выполнение основного этапа сканирования необходимо обеспечить как минимум 2 проезда по участку работ, при этом перекрытие между проездами должно составлять не более 15 метров (чем больше перекрытие тем проще программе будет рассчитать углы несоосности).
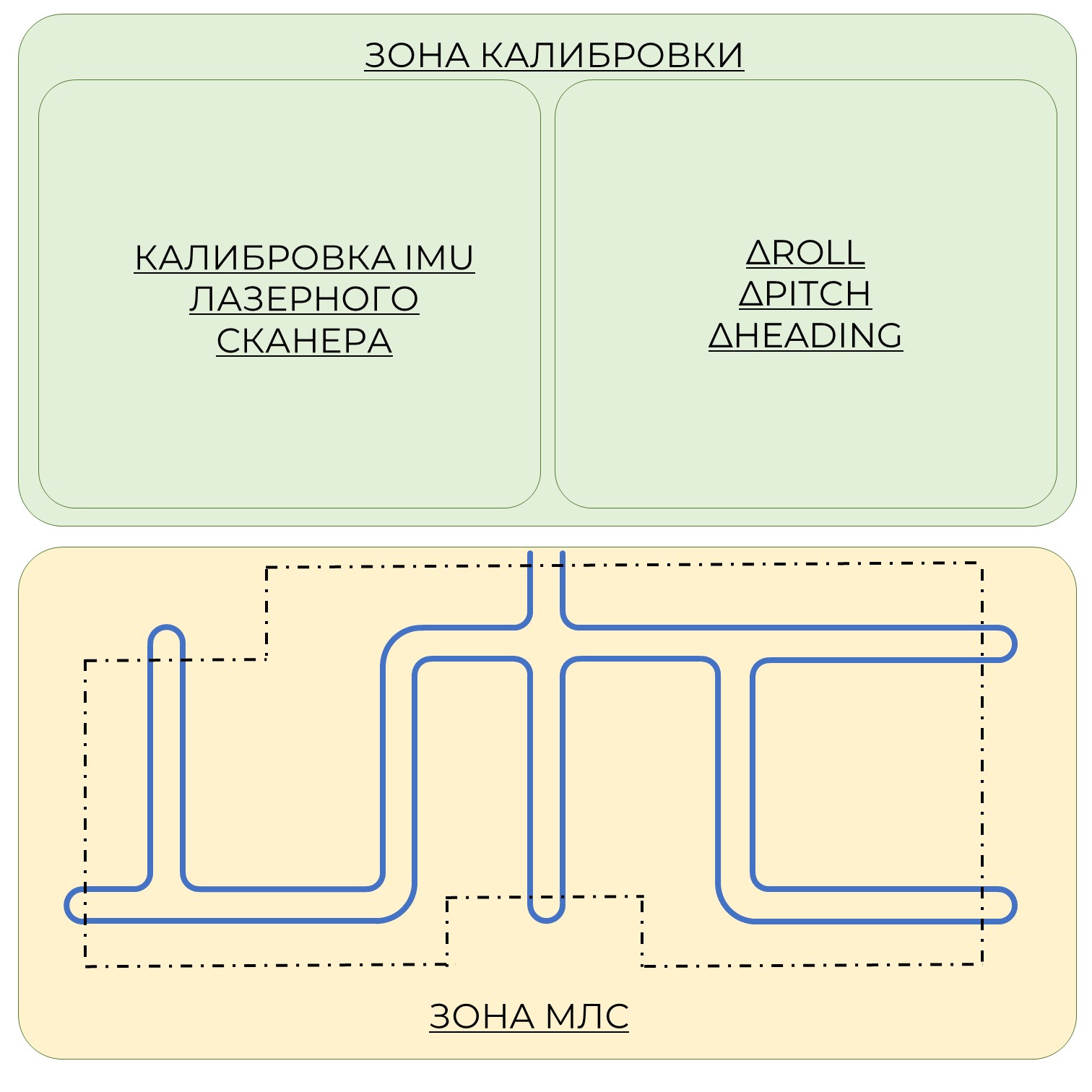
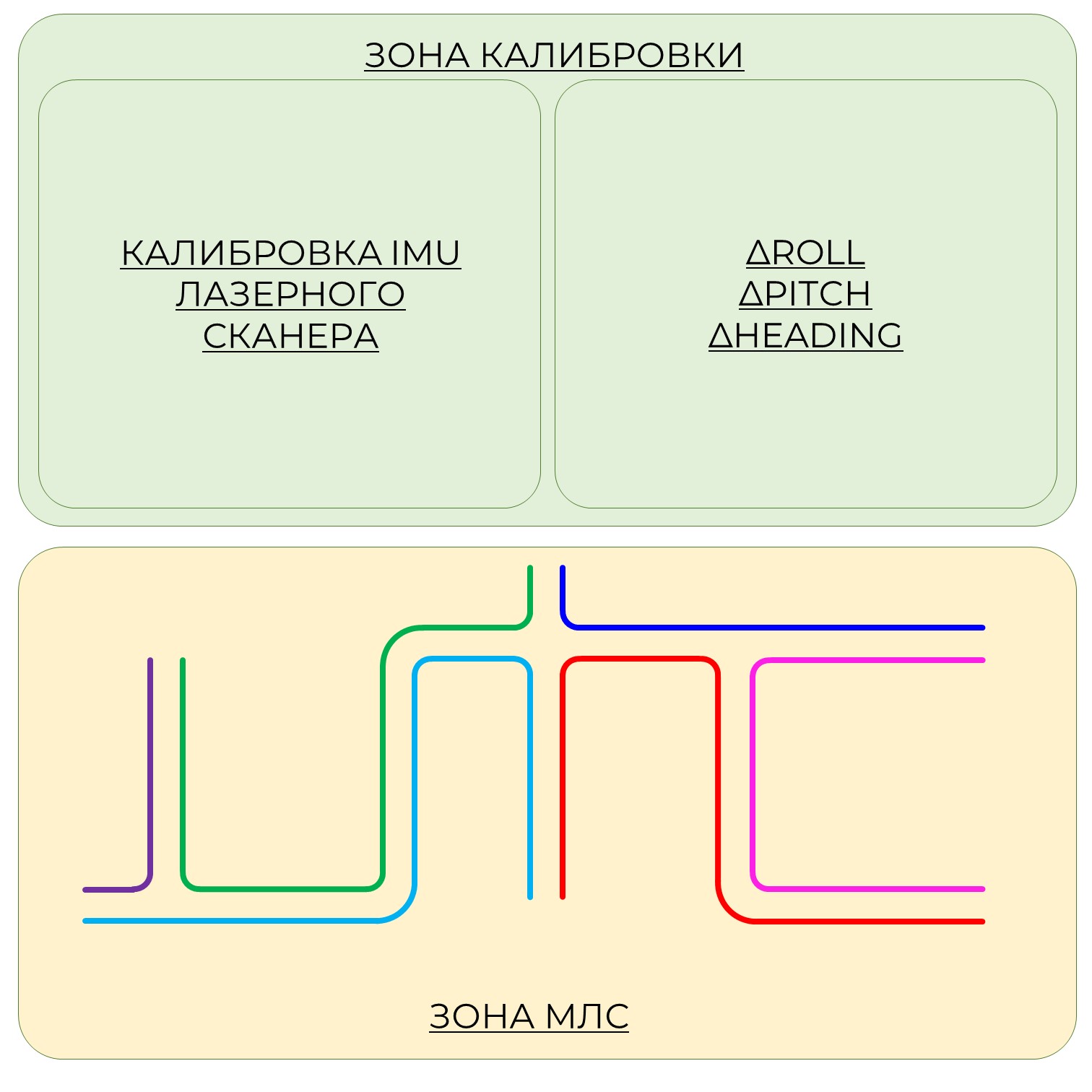
Технология расчета углов несоостности сканов в пост обработке предусматривает наличие вертикальных объектов, поэтому если на участке сканирования вертикальные объекты отсутствуют или их количество минимально необходимо дополнить работы участком с вертикальными объектами для расчета углов несоосности.
Рекомендуется выполнять сканирование в прямом и обратном направление чтобы объекты сканировались с обеих сторон (спереди и сзади), если технически так сделать нельзя то допускается сканирование в 2 проезда в одном направление, однако стоит учитывать, что в этом случае плотность покрытия объекта может быть не полной.
Всегда выполняйте проезды с небольшим запасом т.к. в пост обработки повороты будут обрезаны.
Выполнение МЛС при помощи TOPODRONE BackPack
| TOPODRONE BackPack – это устройство на базе рюкзака, позволяющее использовать лазерные сканеры TOPODRONE отдельно от дрона для мобильного лазерного сканирования. При этом сам модуль сканер TOPODRONE устанавливается на вехе, конструктивно совмещенной с внешней ГНСС антенной, которые в свою очередь смонтированы на жесткой раме рюкзака. Внутри рюкзака располагаются элементы питания модулей. Как правило, источником питания служит внешний аккумулятор, который входи в комплект для мобильного лазерного сканирования. TOPODRONE Backpack размещаются на спине оператора так, чтобы рюкзак находился сзади со спины от оператора, а внешняя ГНСС антенна и лазерный сканер находились сверху выше головы оператора в вертикальном положен. В случае, если внешняя ГНСС антенна и сканер перекрываются головой оператора, необходимо подтянуть лямки рюкзака так, чтобы увеличить высоту выноса модулей вверх. При непосредственном использовании оператору необходимо перемещаться с максимальной скоростью не более 5-9 км/час, удерживая положение антенны и лазерного сканера TOPODRONE в вертикальном положении. В случае заваливания уровня модулей более чем на 10 градусов, конечные результаты могут быть неудовлетворительными. |
|

