
Aerial photography
Select the Aerial Photography tab to customize the processing parameters of the PPK Post Processing and RTK Post Processing modules.
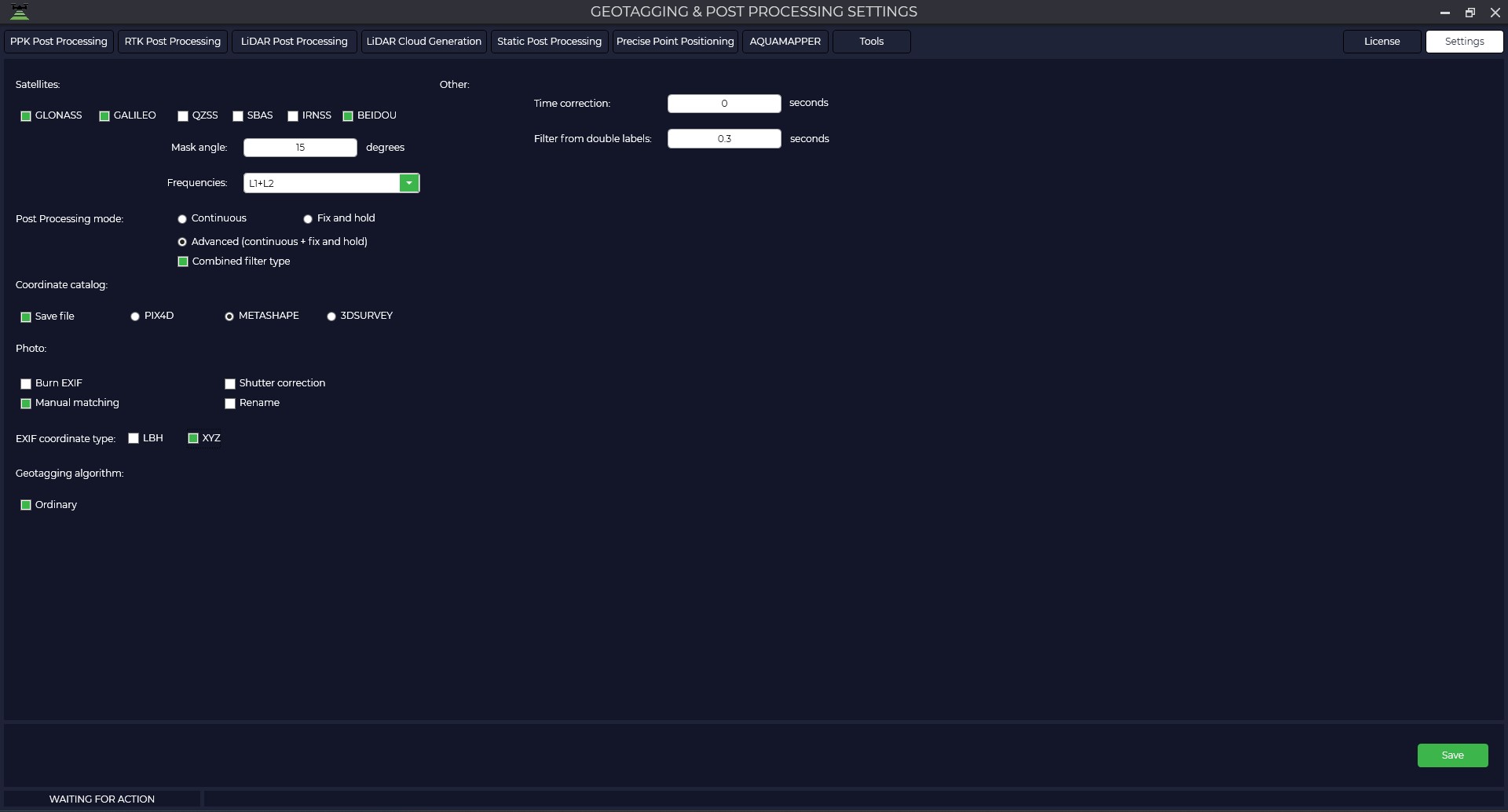
In the Postprocessing Mode window, you can select from Continuous, Fix and hold, or Advanced.

In "Fix and Hold" mode, the program strives to obtain a fixed positioning solution that provides the highest accuracy and reliability. It uses information from the base station and rover to calculate the relative position and then amplifies this solution to achieve a fix. When a fix is achieved, the program holds this solution for as long as possible, even if the signal quality temporarily drops or some satellites are lost.
The purpose of the "Fix and Hold" mode is to provide a stable and reliable fixed solution, which is particularly useful in surveying applications where high accuracy and long-term stability are required. This mode may be preferred when it is important to avoid switching between solutions and to ensure continuity of the fix even in the face of temporal changes (e.g. signal reflections or passing through obstacles).
In "Continuous" mode the algorithm processes data continuously and updates positioning results as new data is received. In contrast to the "Fix and Hold" mode, here the program does not fix the solution, but continuously calculates the rover position based on the current data. When new observations are received, the program updates the position taking into account these data and previous results.
Continuous mode provides more relevant positioning results because it continuously updates the position based on the latest data. It can be useful in applications where relevance and dynamic position changes are more important.
The choice between "Fix and Hold" and "Continuous" modes depends on the specific requirements and conditions of the application. If stability and reliability of solution fixation is important, especially under static conditions, the "Fix and Hold" mode may be preferred. If relevance and dynamic positioning are more important, "Continuous" mode provides a more continuous position update based on the latest data.
The "Advanced" mode is a combination of the previous modes with all their pluses, but data processing takes a little longer.
In the "Coordinate Catalog" window, you should check the "Write File" box to save the catalog of photo centers and select the file format for the program you are using.

In the "Photos" window you can save the coordinates of the photo centers in the EXIF file of the photo, assign a unique name to the photos depending on the time of creation, it is recommended to check the "Manual matching" checkbox for correct matching of photos and marks, the "Shutter correction" checkbox is responsible for shifting the mark by half the shutter time.

In case you checked "Write tags" in the previous window, you should select the format of coordinates saving (LBH - geographic coordinates, XYZ - rectangular coordinates).

The "Geotagging Algorithm" tab contains settings to help the program match photos and tags in the event of a quantity mismatch.
Normal - the alignment is done in the order of the photos taken.
Increase time weighting - matching is based on the time the photos and tags were created.
Increase coordinates weight - Matching is performed by navigation coordinates of photos contained in tags and high-precision coordinates of tags as a result of post-processing in TOPODRONE Post Processing program.

In case of routes where some photos are overlapped with other photos, the coordinate matching algorithm may not work correctly. Example: route on one battery when shooting a small object for 3D reconstruction. In the case of shooting when the camera is pointing at nadir and then immediately shooting when the aircraft is shooting perspective.
The double-tag filter allows you to remove unnecessary tags at the post-processing stage. Default value 0.2 seconds.

No Comments