
Ground classification
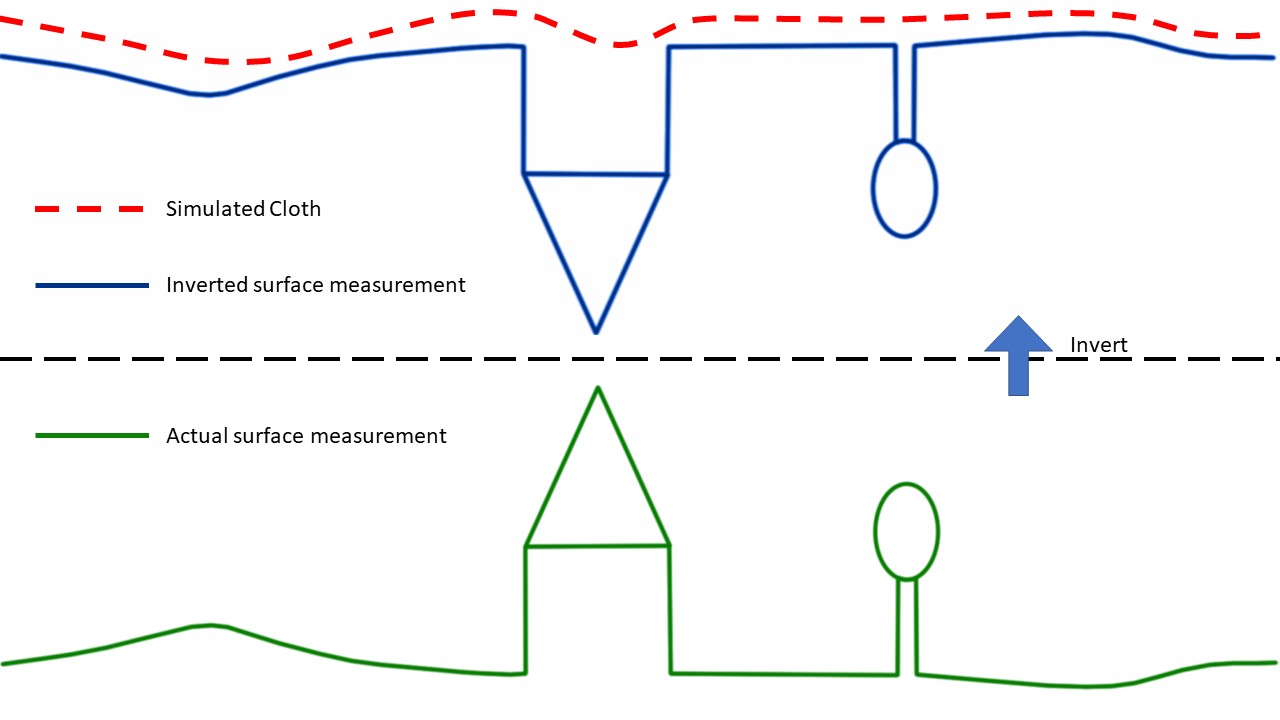
The Ground Classification tool allows you to divide the point cloud into two components: terrain related points and all other points. This method is based on a simplified physical process. Imagine a piece of cloth suspended above the terrain, which then falls down due to gravity. If the fabric is soft enough, it will stick to the surface and the final shape of the fabric will be a digital model of the terrain. However, if the point cloud is first turned upside down and the fabric is made stiff, the final shape will be a digital terrain model. A method called fabric modelling is used to model this process. Based on this method, a cloth modelling filtering (CSF) algorithm has been developed to extract ground points from the point cloud. An overview of the proposed algorithm is shown in Fig. First, the original point cloud is flipped upside down, and then a fabric is dropped on the flipped surface. By analysing the interaction between the fabric nodes and the corresponding points, the final shape of the fabric can be determined and used to classify the original points into terrain points and all other points.
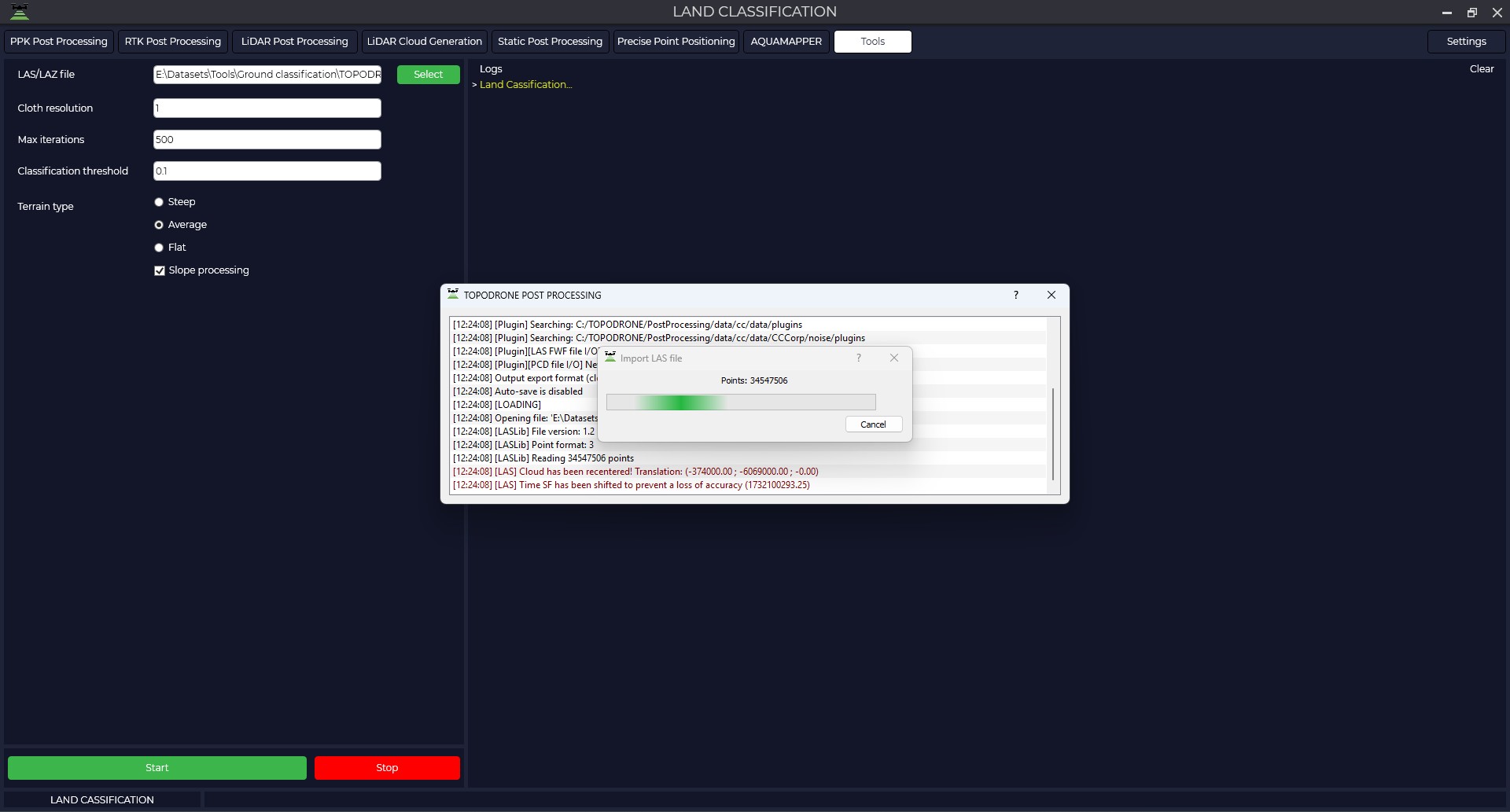
When launching the tool, we are greeted with a startup window.
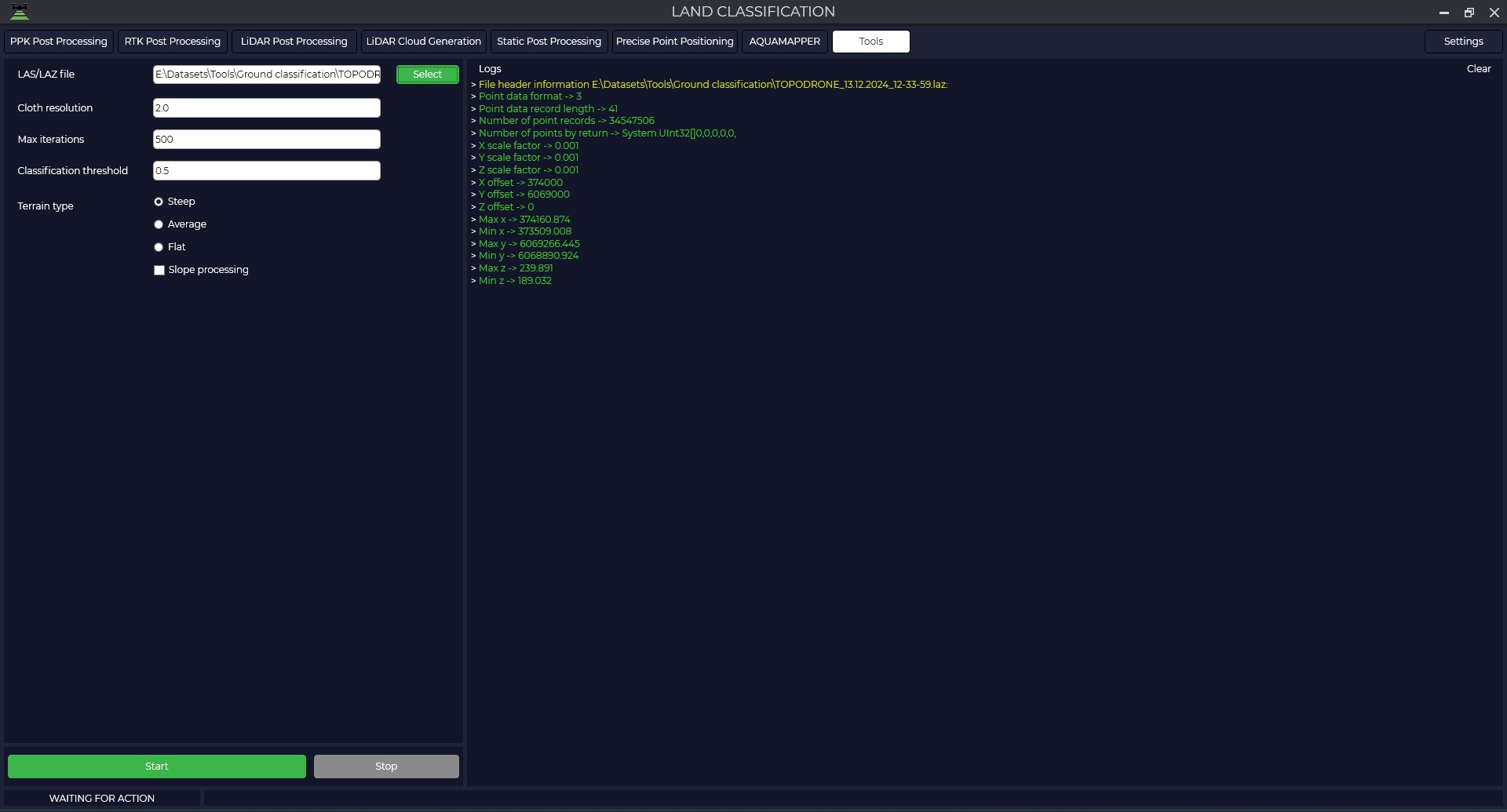
In the window that opens, click the "Select" button and select the file in the *.las or *.laz format for which you are going to make a classification. The Logs window displays information about the uploaded file.
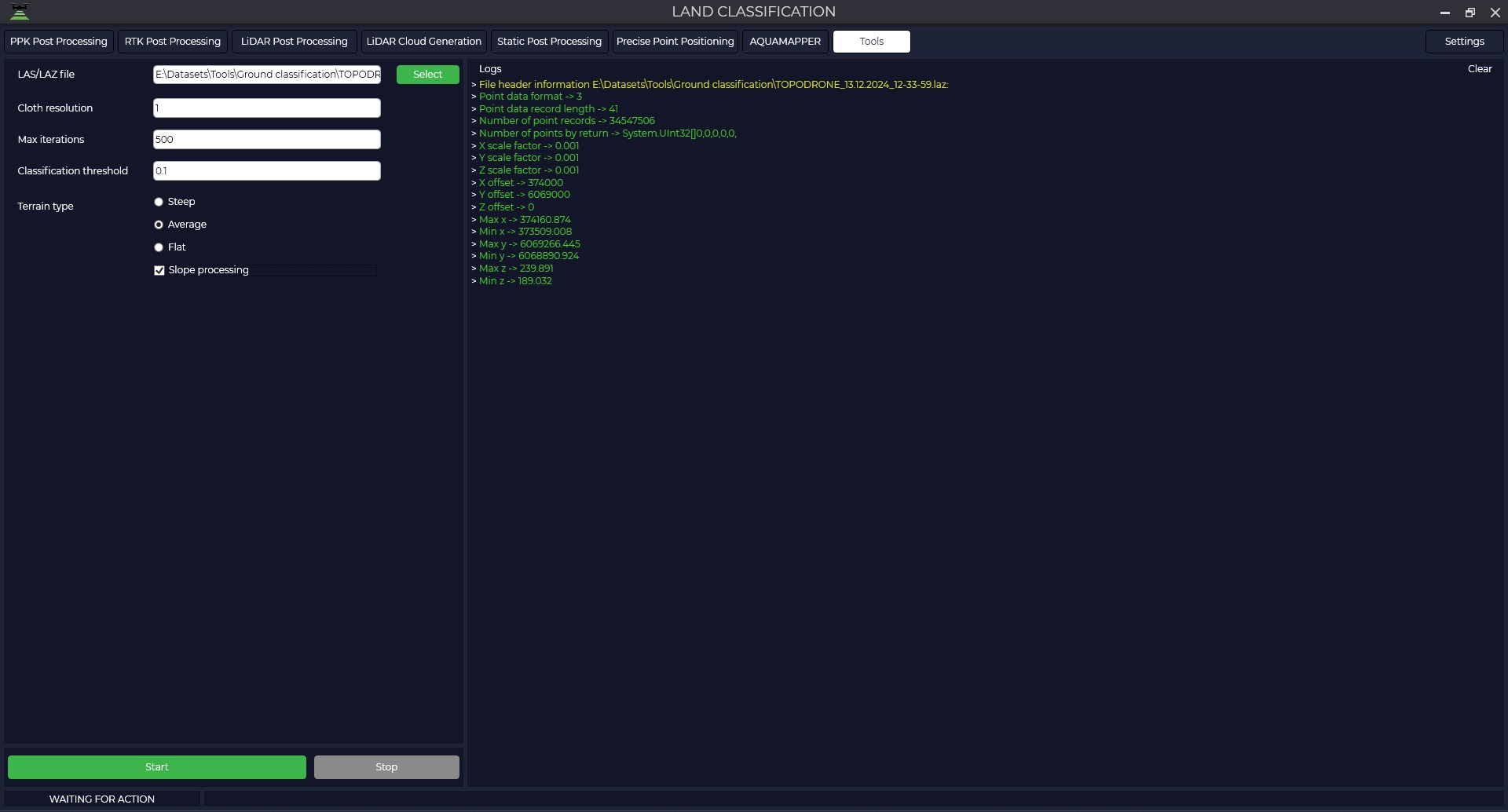
After that, set parameters that match the characteristics of your point cloud:
The grid step is the size of the grid cell, expressed in point cloud units, that is applied to cover the terrain. Increasing the grid resolution will result in a more detailed surface model, but will increase the computational load.
Number of iterations - the maximum allowable number of iterations performed during surface modelling. For most scenes it is recommended to set this value at 500 iterations, which is sufficient to achieve acceptable accuracy.
Classification tolerance - a parameter used to separate point clouds into ground related points and other points based on distances to the modelled terrain surface. The units of the tolerance must match the units of your point cloud. The recommended value for this parameter is 0.5, which is appropriate for most processing scenarios.
Terrain Type - with this parameter you can set the type of point cloud scene.
For steep slopes, this algorithm can produce relatively large errors because the modelled fabric is above the steep slopes and does not agree well with ground-based measurements due to internal constraints between particles.
Slope handling — the problem described above can be solved by selecting this option. If your scenes don't have steep slopes, just ignore it.
Press the ‘Start’ button and wait for the operation to complete.
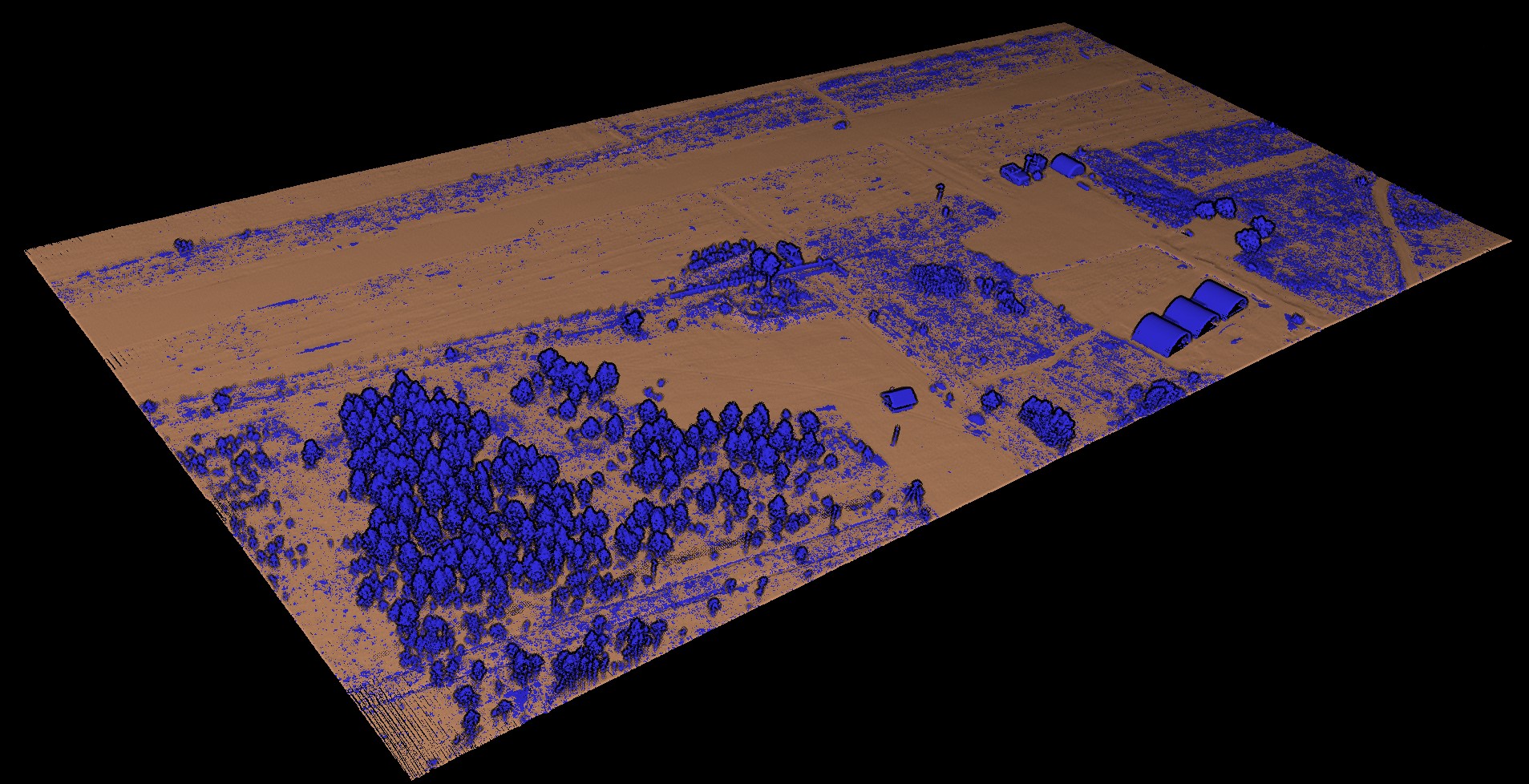
The final result is the files: the ground point cloud and the rest of the points.
No Comments