
Preparation of initial data
After completion of the field works, prior to RAW data processing, it is necessary to organize the achieved dataset:
- Download the data to your computer. Photos from the camera and GNSS files from the PPK module of the aircraft; Data from the TOPODRONE LiDAR;
*.pcap – LiDAR sensor file
*.imr –file from the LiDAR IMU (Inertial Measurement Unit)
*.ubx – raw measurement file from the PPK Upgrade kit or built-in LiDAR PPK (GNSS) receiver
log.txt – LiDAR system log data, doesn't take part in processing stage, but necessary for diagnostics
*.raw – LiDAR system diagnostics data, not included in processing
*.ubx/.obs/.YYo/etc. - Static observation files from the base station;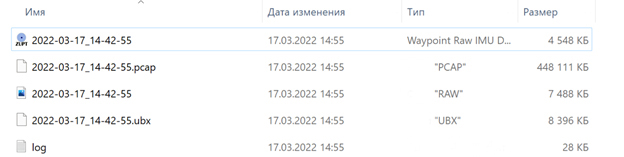
Sample of the TOPODRONE LiDAR single dataset.
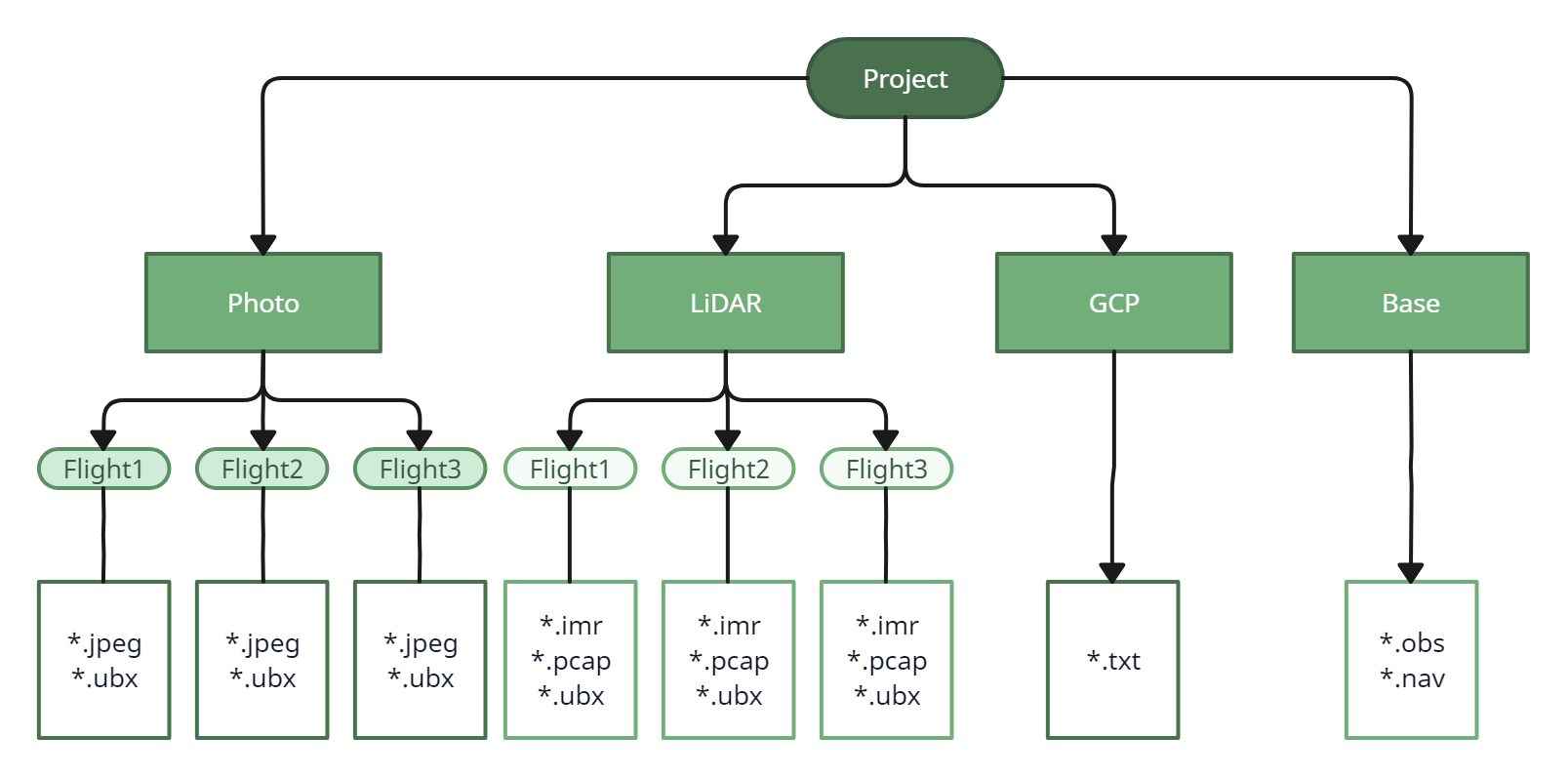
*.txt/.csv/etc. - Catalog of control point coordinates. - Distribute the data to a separate directories with an appropriate names. If you have had multiple flights and/or passes, each dataset shall be copied to a separate folder, accrodingly.
- Images dataset shall be separated according to the flights, as well as the *.ubx files from these flights, which are on a microSD flash card installed in TOPODRONE PPK Upgrade Kit on the aircraft.
Please note that the photos should be separated exactly by flight. In DJI aircraft, photos are named with a numerical designation from 1 to 999 (For example, DJI_0001.jpg and DJI_0999.jpg), if you have more than 1000 files, the system will start writing the images to a new folder named DJI_0001.jpg
- Be sure to convert the static observation file from the base station to RINEX format and move it to a separate folder, for example "Base".
|
|
| Example of data storage organization. |
No Comments