
Release Notes
Software Operation Conditions After Technical Support Expiration
The operation of the TOPODRONE Post Processing distributor depends on the current technical support status. If the paid support period expires before the release date of a new software version, the user will not be able to use this distributor. The following options are available to continue working:
- Renewing technical support – activates access to the latest software versions.
- Using compatible distributors – installing versions released before the expiration date of the current active support.
The corresponding distributors are available for download at the following link: TOPODRONE Software Distributor
TPP v.1.5.3.0
November 11, 2025.
General Improvements
- Visualization.
- Fixed an error related to incorrect initialization of the takeoff point coordinates, which caused its default location to be set as the North Pole or a point with zero coordinates (0°, 0°).
- Performance.
- All calculations related to LiDAR point cloud processing are now performed in streaming mode, eliminating the limitation on the volume of loaded data.
PPK Post Processing
- Added support for a new modification of the Q.Fly Water SWIR camera for calculating the relative soil moisture and plant leaf moisture index.
New Utilities
- LAS/LAZ INSTA 360 Coloring
- A tool created for coloring point clouds from the Insta 360 camera during Mobile Laser Scanning (MLS) and for creating georeferenced panoramas.
- IMR Recovery.
- This tool allows calculating the trajectory of the laser scanner during short-term GNSS data losses.
TPP v.1.5.2.1
July 27, 2025.
General Improvements
- Licensing.
- Added display of the release date on the license information page.
- Performance.
- Accelerated project (PRJ) loading at startup (optimization for ~6000 files);
- Improved data visualization speed (trajectories, photos, timestamps) across all modules.
- Data and Formats:
- Updated antenna file igs20_2353.atx;
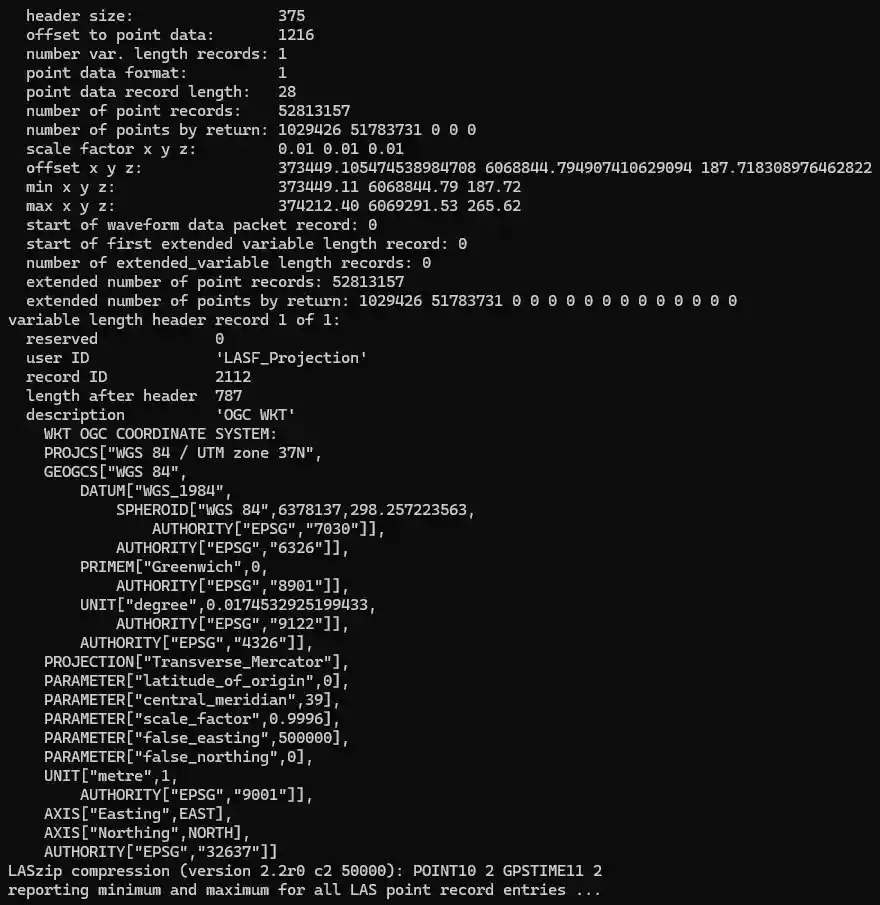
- Integrated the lasinfo utility (LAStools) for checking LAS/LAZ headers;
- Added coordinate system information to LAS/LAZ headers;
-
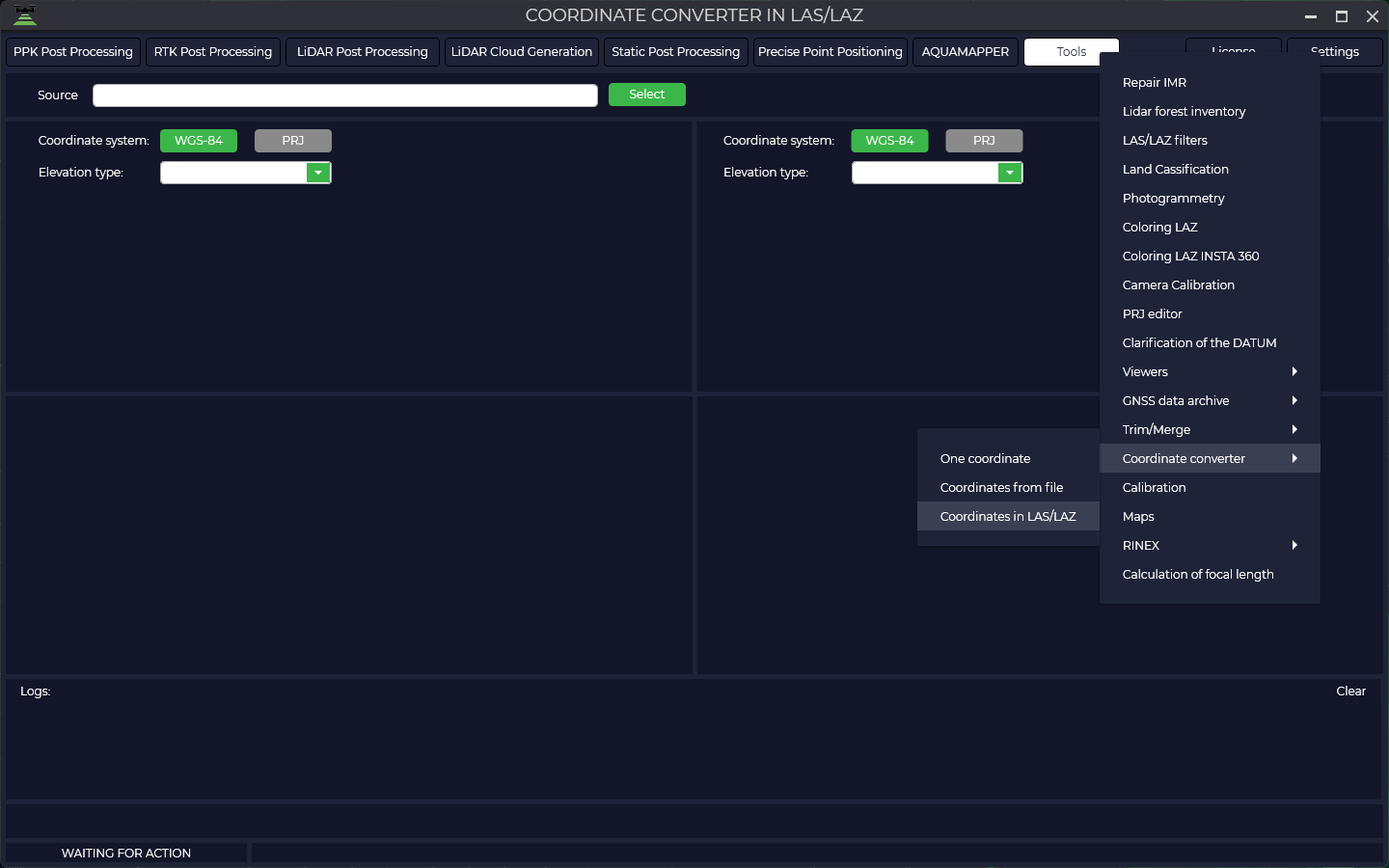
- Added the ability to convert point clouds (.LAS/.LAZ) between Coordinate Systems (in Tools).
- GNSS Processing Settings:
- Added an option to disable GPS grouping when calculating trajectories;
- Removed frequency filtering (L1/L2...) – now all available frequencies are used.
- Logging
- Processing journal maintained in logs.txt, including:
- Rover/base station activation time;
- Number of satellites;
- Used frequencies;
- Data recording rate and other parameters.
- Processing journal maintained in logs.txt, including:
25/07/2025 18:30:15
Dataset №1:
TPP Version: 1.5.2.1(27.07.2025)
License key: 1348DF06-8777-48CF-A6D8-E4239CA973A0
#Images folder: E:\Datasets\Photogrammetry\TOPODRONE P61 21 mm Orsha\Photo RGB
GNSS file: E:\Datasets\Photogrammetry\TOPODRONE P61 21 mm Orsha\Photo RGB\2023-07-05_11-01-12.ubx
Start time: 05/07/2023 11:01:31 UTC
End time:05/07/2023 11:26:52 UTC
Sampling Rate: 0.1 s (≈ 10 Hz)
Observed measurement types:
G (GPS): C1C D1C L1C S1C C2X D2X L2X S2X
R (GLONASS): C1C D1C L1C S1C C2C D2C L2C S2C
E (Galileo): C1X D1X L1X S1X C7X D7X L7X S7X
C (BeiDou): C2I D2I L2I S2I C7I D7I L7I S7I
Number of satellites observed:
Min: 29
Average: 40.6
Max: 42
Epochs : 15208 of 15208 expected ( 100.00% complete )
Number of photos: 304
Number of events: 304
Drone model: TOPODRONE P61+PPK+DJI Matrice 300
Forward/backward offset: 0.074
Left/Right offset: 0.022
Antenna height: 0.362
#Coordinate system: World-WGS 84-UTM-zone 35N (m) EPSG 32635
Geoid model: Ellipsoid WGS-84
#Base station: E:\Datasets\Photogrammetry\TOPODRONE P61 21 mm Orsha\ReachGeoGor_raw_20230705105548.obs
Start time: 05/07/2023 10:56:06 UTC
End time:05/07/2023 12:52:11 UTC
Sampling Rate: 1 s (≈ 1 Hz)
Observed measurement types:
G (GPS): C1C D1C L1C S1C C2X D2X L2X S2X
R (GLONASS): C1C D1C L1C S1C C2C D2C L2C S2C
E (Galileo): C1X D1X L1X S1X C7X D7X L7X S7X
S (SBAS): C1C D1C L1C S1C
C (BeiDou): C2I D2I L2I S2I C7I D7I L7I S7I
Number of satellites observed:
Min: 40
Average: 42.6
Max: 46
Epochs : 6966 of 6966 expected ( 100.00% complete )
North: 6045511.967295254
East: 701922.4288487637
Height: 228.738
Antenna height: 1.834
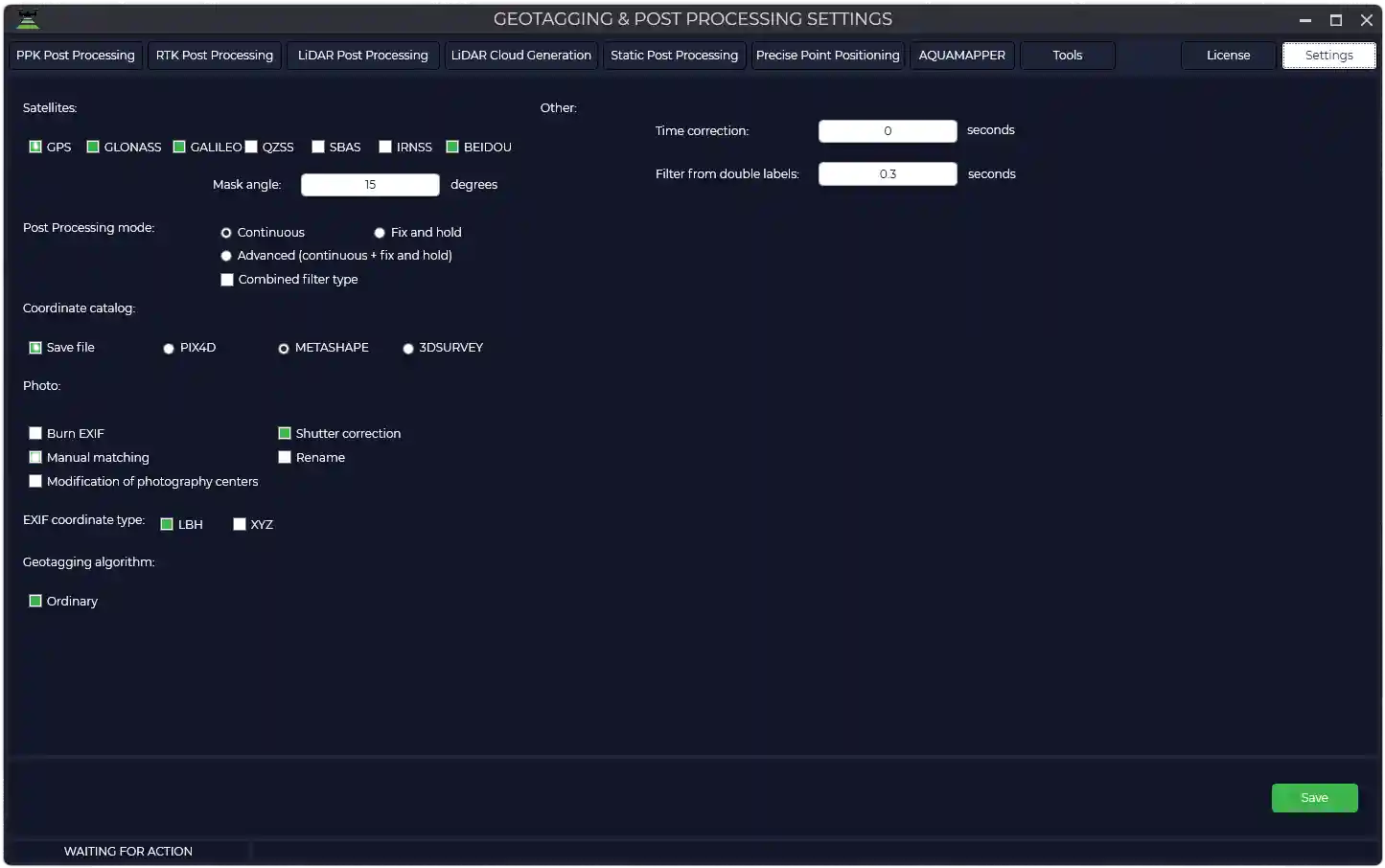
#Settings
Satellites: GPS GLONASS GALILEO BEIDOU
Mask angle: 15
Post Processing mode: Continuous / [ ] Combined filter type
Coordinate catalog: [x] Save file: Metashape
Photo: [ ] Burn EXIF
[x] Shutter correction
[x] Manual matching
[ ] Rename Photo
[ ] Modification of photography centers
EXIF coordinate type: [ ] LBH [x] XYZ
Geotagging algorithm: [x] Ordinary
[ ] Increase time weight
[ ] Increase weight of coordinates
Time correction: 0 seconds
Filter from double labels: 0.3 secondsPPK Post Processing
- Added support for the TOPODRONE Q.FLY camera.
RTK Post Processing
- Correction of the center of photography for DJI Matrice 4E by offsets from the MRK file;
- Added data processing with DJI Mavic 3 Multispectral.
LiDAR Cloud Generation
- Calculation of calibration angles has been significantly accelerated;
- New calibration algorithm for mobile laser scanning from a car — eliminates post-processing in third-party software.
TPP v.1.5.1.4
March 07, 2025.
PPK Post Processing
- Added support for UNICORE GNSS chips for all TOPODRONE models.
- Added antenna offset presets for:
- TOPODRONE P24 New + PPK + DJI Matrice 350.
- Implemented automatic offset detection based on image tags.
- Antenna offset parameters are hidden from the interface (automatic calculation is used).
RTK Post Processing
- Implemented automatic loading of navigation files for each flight;
- Fixed the display of the "Plot" window in batch processing.
LiDAR Post Processing
- Fixed the display of the "Plot" window in batch processing.
LiDAR Cloud Generation
- Added generation of point clouds in local rectangular coordinates (in addition to global CS).
AQUMAPPER
- Automation:
- Added a filter to remove points with zero depth.
- Data Formats:
- Implemented separation of data from the dual-frequency TOPODRONE AQUAMAPPER Next sensor in .LAZ format:
- 200 kHz — 2nd return,
- 450 kHz — 1st return.
- Rounding values in .CSV (X/Y/Z coordinates, depths) to 3 decimal places.
- Implemented separation of data from the dual-frequency TOPODRONE AQUAMAPPER Next sensor in .LAZ format:
- Algorithms:
- Improved temperature calculation for each measurement (increased accuracy).
TPP v.1.5.1.3
January 25, 2025.
General Improvements
- Validation of base station and rover operation time.
- In the PPK Post Processing, RTK Post Processing, and LiDAR Post Processing modules, automatic validation of the correspondence between rover and base station data recording times has been implemented. A warning is displayed if the time intervals do not match: "Base station operation time does not match rover operation time." Standard processing is performed only with a complete match. For batch processing, the check is applied to all rover files.
- Checking for time gaps in IMU data.
- Added automatic checking of IMU measurement files for time gaps. If gaps are detected, a warning is displayed with the recommendation: "IMR file has time gaps, please use the 'IMR Trimming' tool."
- Interface Unification.
- Unified the sizes of the "Coordinate System", "Logs", and "Map" dialog windows in the specified modules.
RTK Post Processing
- Fixed an error where the "Plot" window (globe) call button was not displayed in the PPK Post Processing module, including batch processing mode.
TPP v.1.5.1.2
December 28, 2024.
General Improvements
- Launching the License Manager from the interface.
- Added a license information dialog with the ability to directly launch the "License Management Manager" from the TOPODRONE Post Processing interface.
- Updated the base RTKlib library (version j → k).
- Added a license information dialog with the ability to directly launch the "License Management Manager" from the TOPODRONE Post Processing interface.
PPK Post Processing
- Implemented automatic normalization of camera shutter release timestamps to a single format to eliminate the doubling effect. The new algorithm detects gaps in timestamps and adds missing data to the stream using an approximation method.
RTK Post Processing
- Adjustments have been made to the "Dynamic" function parameters. The update aims to reduce data processing errors during trajectory prediction. The new model accounts for the probability of sudden changes in the rover's dynamic parameters (speed and direction), allowing for more accurate position prediction under uncertainty.
LiDAR Cloud Generation
- Developed a new algorithm for calculating calibration angles by introducing a multiplier dependent on the speed of movement, which accelerates the time to find corrections.
AQUMAPPER
- Added support for a dual-frequency echosounder (200 kHz + 450 kHz). The low-frequency signal (200 kHz) provides greater penetration depth, while the high-frequency signal (450 kHz) provides higher clarity and detail of the bottom. The combined use of frequencies increases both the survey depth and the ability to separate weak signals for detailed data.
- Added trajectory display in the "Plot" window.
TPP v.1.4.5.0
November 12, 2024.
PPK Post Processing
- Implemented support for UNICORE GNSS receivers.
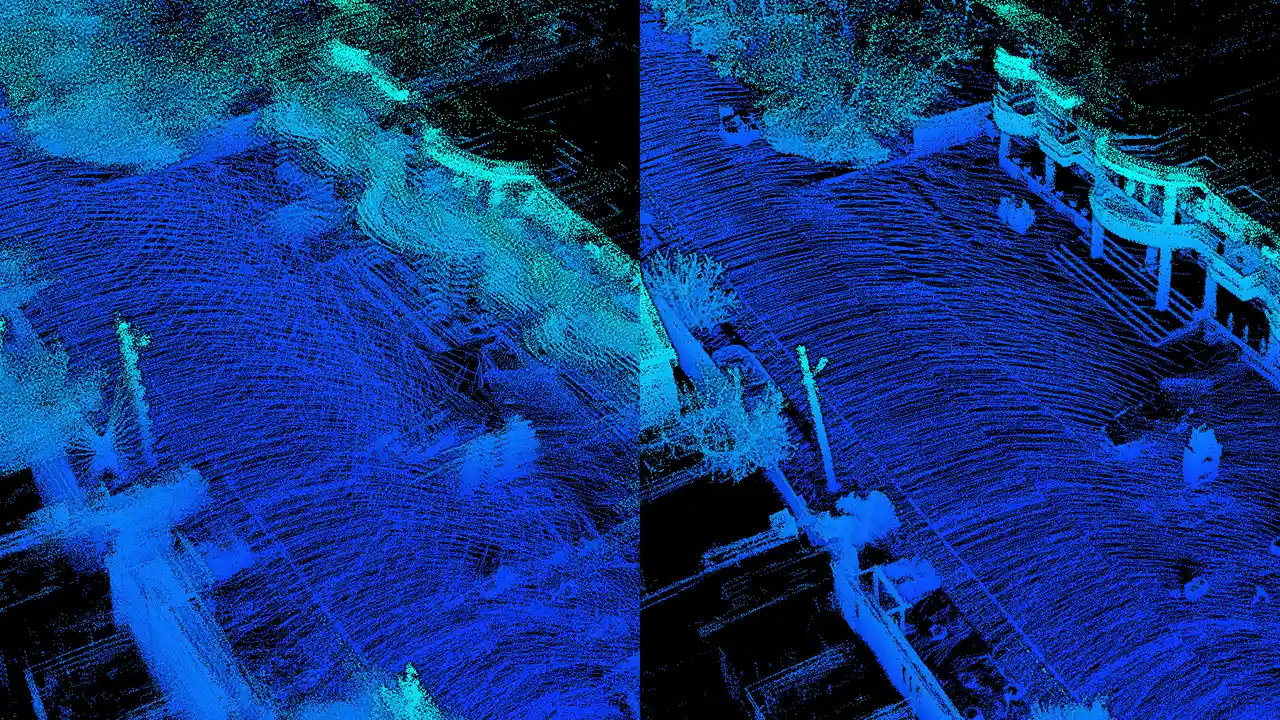
![]()
- Improved the algorithm for generating georeferencing files used for coloring point clouds obtained from TOPODRONE laser scanners.
RTK Post Processing
- Ensured correct conversion of files from
.binto.obsand.navformats.
TPP v.1.4.4.4
November 04, 2024.
PPK Post Processing
- Added automatic creation of a camera shutter event timestamp file for subsequent use in the point cloud coloring utility for point clouds obtained by TOPODRONE laser scanners.
RTK Post Processing
- Ensured correct conversion of data from the proprietary
.binformat to the standard RINEX format.
LiDAR Post Processing
- Before sending for processing on the server, the base station measurement file in *.**O format is automatically converted to *obs format to ensure compatibility.
New Utilities
- Distortion Correction.
- Implemented a new camera calibration utility designed to calculate interior orientation parameters: principal point coordinates, focal length, radial and tangential distortion coefficients on photographs.
- Point Cloud Texturing.
- Added a utility for coloring point clouds using photo data when using a photogrammetric camera and a TOPODRONE laser scanner together.
TPP v.1.4.4.2
October 02, 2024.
General Improvements
- Added a "Clear Logs" button in all modules for quick clearing of the processing log window.
- Coordinate system files (*.prj) are now stored on the server. Added a function to download them via the "General Settings" section.
PPK Post Processing / RTK Post Processing
- Updated and fixed configuration files for the modules.
LiDAR Cloud Generation
- Optimized the calibration angle calculation algorithm. The number of iterative passes is limited to 10 to prevent excessive computations.
Static Post Processing / PPP
- Updated sources for automatic ephemeris download. Now using University of California, San Diego (UCSD) servers instead of NASA to ensure data availability for every day.
AQUAMAPPER
- Ensured correct data processing when GNSS equipment time crosses midnight and during batch calculation of datasets collected over several weeks.
TPP v.1.4.4.1
September 10, 2024.
PPK Post Processing / RTK Post Processing
- Speed data in output files is now correctly read from
event.pos. Previously, thepos.statfile was erroneously used, which in some scenarios contained zero values. - Eliminated unwanted reset of the map view to coordinates (0;0) after processing trajectories for cameras without navigation data. The map view now remains unchanged.
- Fixed an error where after processing data from the TOPODRONE PT61 camera, previews for a non-existent thermal sensor were erroneously generated for other cameras.
LiDAR Post Processing
- Implemented the ability to enter base station coordinates directly in a local coordinate system, considering the geoid model.
LiDAR Cloud Generation
- When generating multiple clouds from a single trajectory, each copy of the trajectory in the LCS (Local Coordinate System) receives a unique prefix
_HHMMSS(hours-minutes-seconds of generation), preventing them from being overwritten. - The algorithm for finding calibration angles has been supplemented with automatic calculation of a heading scaling factor depending on the speed of movement, significantly reducing the required number of iterative passes.
AQUAMAPPER
- Added the ability to simultaneously load and process data in UBX format during batch processing.
Utilities
- In the "IMR File Viewer" utility, the vibration graph is now displayed with a baseline "set to 0" for more visual analysis.
- The parsing algorithm for data from Livox MID-360 sensors has been refined, ensuring their complete and accurate processing.
TPP v.1.4.4.0
August 13, 2024.
PPK Post Processing
- Fixed incorrect preview image generation for the thermal imager of the TOODRONE PT61 camera. The algorithm now correctly processes sensors of different sizes (320 and 640 pixels).
- Fixed an error where a different number of photos from the TOPODRONE PT61 camera and timestamps led to the skipping of the manual matching window and, consequently, the absence of an output photo center catalog.
PPK Post Processing / RTK Post Processing
- Ensured correct column formation and file structure when exporting the photo center catalog for Agisoft Metashape and 3DSurvey software.
- The "Timestamp Correction" field has been returned to the photogrammetry parameters in the settings.
Tools
- Datum Parameters Calculation.
- Implemented a proprietary algorithm for calculating datum parameters for coordinate systems. Previously, a third-party library was used; now, a proprietary solution is applied for improved accuracy and transformation control.
- Merge track files.
- Fixed incorrect header formation when performing the track mergeing operation.
- Calibration.
- Added an "Open Catalog" button to the calibration interface for loading point catalogs.
- Ground Classification
- Added an option – "Slope Processing" to the ground classification module to improve terrain analysis.
- IMR Viewer
- Added display of vibration graphs along the axes to the utility for detailed analysis of inertial system data quality.
TPP v.1.4.3.0
July 30, 2024.
AQUAMAPPER
- Data processing settings have been moved to the user interface (UI) for more convenient and flexible parameter management.
- Added infographics displaying key parameters: equipment roll, pitch, and bottom topography for surveying data quality control.
Tools
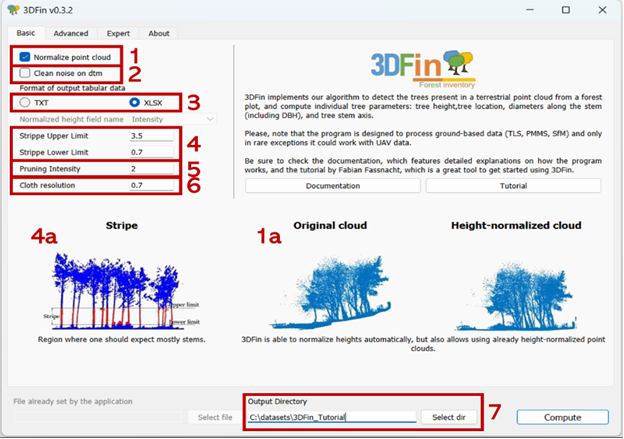
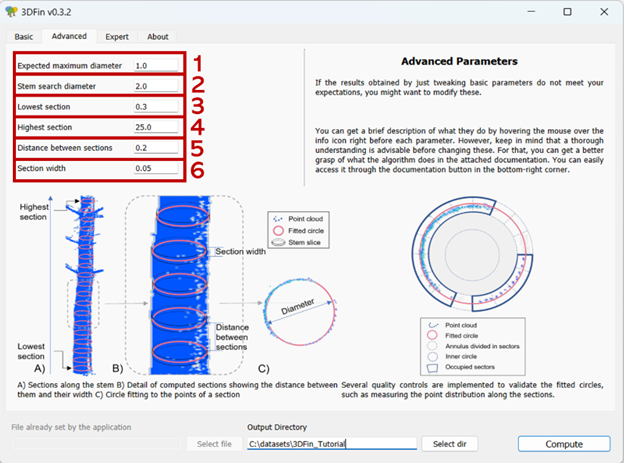
- Added a new utility «3DFine: Forest Inventory»
- The utility is designed for automated analysis of laser scanning data for the purpose of forest taxation. The utility's algorithms automatically detect trees, calculate taxation indicators such as height, Diameter at Breast Height (DBH), and cross-sectional area, and generate standard reports for forestry.
TPP v.1.4.2.0
June 20, 2024.
PPK Post Processing
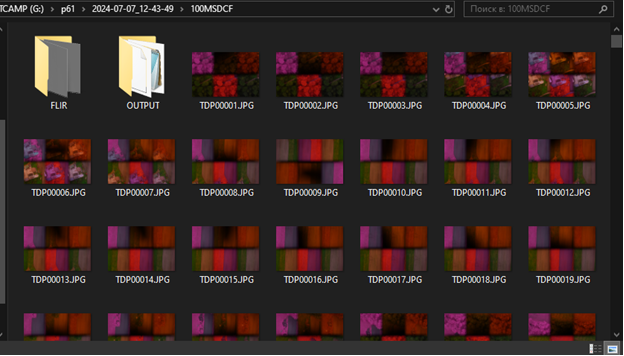
- Added support for the TOPODRONE PT61 camera, including with AGROWING multispectral lenses.
Tools
- Point Cloud Viewer. Updated PotreeConverter from version 1.7 to 2.1.
TPP v.1.3.3.4
April 23, 2024.
Tools
- Trim IMR. Added the ability to trim a file obtained from an inertial sensor without loading data from a geodetic receiver.

TPP v.1.3.3.0
April 05, 2024.
LiDAR Post Processing
- During batch calculation of high-precision tracks, 10 times fewer points are displayed on the map for visualization to optimize performance. This solves the problem of the program interface "freezing" when rendering tracks containing a large number of points.
LiDAR Cloud Generation
- Implemented a new, improved algorithm for calculating scanner installation calibration angles, providing increased accuracy and stability of results.
- Fixed: The function for trimming beam length for data from laser scanners with Hesai sensors now works correctly.
- SLAM Processing. To improve registration accuracy, returning the point cloud to the track is performed using calibration parameters.
TPP v.1.3.2.2
March 17, 2024.
General Improvements
- Automatic Dependency Installation.
- Key dependencies (WinPcap and .NET Core 3.1 Desktop Runtime) are now installed automatically during the distributor installation process, relieving the user from the need for manual environment setup.
LiDAR Cloud Generation
- Implemented a new iterative algorithm for calculating calibration angles. Angles are calculated and applied stepwise for gradual refinement and correction of track tilt, significantly improving the accuracy of the final point cloud.
AQUAMAPPER
- The AQUAMAPPER module for comprehensive processing of hydrographic survey data has been fully integrated into the distributor.
TPP v.1.2.0.1
November 23, 2023.
LiDAR Post Processing
- Implemented switching between Standard and Expert operation modes in the program settings.
- Standard Mode: Performs automatic detection of IMU and LiDAR models, simplifying setup for the user.
- Expert Mode: Provides the ability to manually select specific IMU and LiDAR models from a list for full control over processing parameters.
TPP v.1.2.0.0
November 20, 2023.
LiDAR Post Processing
- Implemented an alternative algorithm for calculating track coordinates based on comprehensive processing of information from the angular navigation hardware platform and GNSS.
LiDAR Cloud Generation
- Survey type (Aerial / Terrestrial) is determined automatically based on the processed trajectory.
- The position of the laser scanner sensor (Forward / Backward) is determined automatically based on the processed trajectory, eliminating errors from manual assignment.
TPP v.1.1.17.0
November 13, 2023.
LiDAR Cloud Generation
- Implemented an algorithm for automatic detection and application of UTM (Universal Transverse Mercator) projection based on the point cloud center coordinates, if the user did not explicitly specify a coordinate system in the settings.
Static Post Processing
- Implemented a function for automatic reading and adding of navigation coordinates from the headers of base station GNSS files. This simplifies the initial processing setup, especially when working with a large number of sessions.
TPP v.1.1.16.1
November 01, 2023.
PPK Post Post Processing / RTK Post Processing / Static Post Processing / Precise Point Positioning
- The combined Kalman filter is now enabled by default. Using this filter significantly improves the accuracy and smoothness of the calculated trajectories.
TPP v.1.1.16.0
October 30, 2023.
LiDAR Cloud Generation
- Implemented a new algorithm for finding calibration angles based on ICP (Iterative Closest Point). This method uses iterative point cloud matching for accurate calculation of LiDAR installation angles, significantly improving calibration accuracy.
- Added support for the Livox MID-360 LiDAR, including automatic recognition, data parsing, and calculation of calibration parameters.

TPP v.1.1.15.0
October 04, 2023.
PPK Post Processing / RTK Post Processing
- Completely updated the built-in catalog of GNSS antenna models. Updated antenna parameters improve phase center offset corrections and, consequently, overall GNSS processing accuracy.
Tools
- Added a new utility «Datum Refinement». The tool allows performing high-precision transformation and calculation of transition parameters between coordinate systems based on point catalogs.
TPP v.1.1.14.0
September 20, 2023.
LiDAR Post Processing Settings
- Added the ability to specify LiDAR rotation relative to the IMU (roll/pitch/heading).
New Utilities
- PRJ Editor
- The utility allows correcting PRJ file parameters.
TPP v.1.1.13.0
August 29, 2023.
General Improvements
- Added automated download of geoids from the TOPODRONE server (199 geoids). Geoids are no longer included in the distributor (reducing distributor size) and are downloaded by users as needed.
New Modules
- Photogrammetry
- Added a module for photogrammetric processing
TPP v.1.1.12.0
August 22, 2023.
General Improvements
- Integrated a new version of the high-precision trajectory calculation algorithm with support for current TOPODRONE equipment.
- Updated the LAS/LAZ processing library (support for formats 1.3/1.4).
Laser Scanning Data Processing
- Added filters to improve the quality of the laser scanning point cloud: SOR and NOISE.
New Utilities
- Ground Classification
- Added a utility that allows performing automatic terrain classification.
TPP v.1.1.11.1
August 08, 2023.
LiDAR Cloud Generation Settings
- For Hesai sensors, implemented an offset of the emitter's optical axis relative to the geometric center of the sensor's sensitive area.
TPP v.1.1.9.1
June 24, 2023.
PPK Post Processing / RTK Post Processing / LiDAR Cloud Generation
- Implemented a new coordinate system filtering system using progressive full-text search. Results are displayed as a list where each item represents the full projection name.
TPP v.1.1.9.0
June 04, 2023.
General Improvements
- The satellite filtering utility has been accelerated by 50 times.
- A "ruler" for distance measurements has been added to all maps. Double-click on the map and the distance between these points will be written in the logs (in feet or meters depending on the state of the "Feet" checkbox).
New Algorithms
- TOPOSLAM
- Added a new algorithm consisting of three stages. The first stage performs sequential cloud alignment by generation time. The second stage performs mutual alignment of the nearest clouds by distance. The third stage, using calibration, returns the position of the aligned clouds to the track.
No Comments