
LAS/LAZ Insta 360 Coloring
This module is designed for automatically assigning color characteristics to a Mobile Laser Scanning (MLS) point cloud, coloring it with natural colors using data obtained from TOPODRONE scanning systems.
Operating Principle and Data Requirements:
To obtain a point cloud with reliable RGB information, the following processing sequence must be executed:
-
Primary Data Processing: Perform standard processing of raw data in the LiDAR Post Processing module to obtain the laser scanner's trajectory.
-
Point Cloud Generation: Generate the final point cloud in LAS/LAZ format using the LiDAR Cloud Generation module.
-
Point Cloud Coloring: At the final stage, using the "LAS/LAZ Insta 360 Coloring" tool, RGB values are assigned to the points in the cloud. The algorithm matches each laser reflection point with the corresponding pixel from the panoramic images taken by the Insta 360 camera, based on the precise trajectory and data about the camera's position relative to the laser scanner. This ensures realistic coloring in natural colors.
The point cloud coloring process involves several stages.
Data Preparation
During recording, the Insta 360 camera saves data in its proprietary formats (*.lrv and *.insv). These formats are optimized for working with panoramic video in the manufacturer's software. For further processing, specifically for point cloud coloring, the video stream must be converted to the standard *.mp4 format. To do this, you need to install the Insta360 Studio program.
-
Launch the Insta360 Studio program.
-
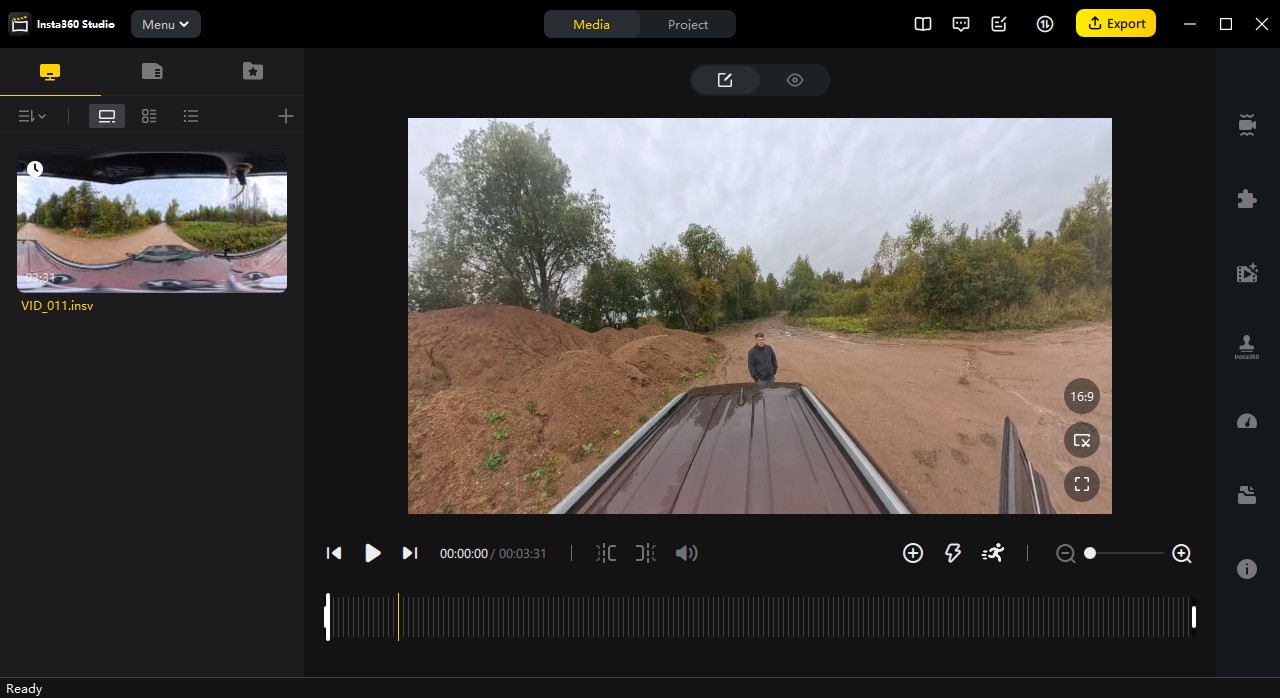
Import the source files (*.lrv and *.insv) into the project.
-
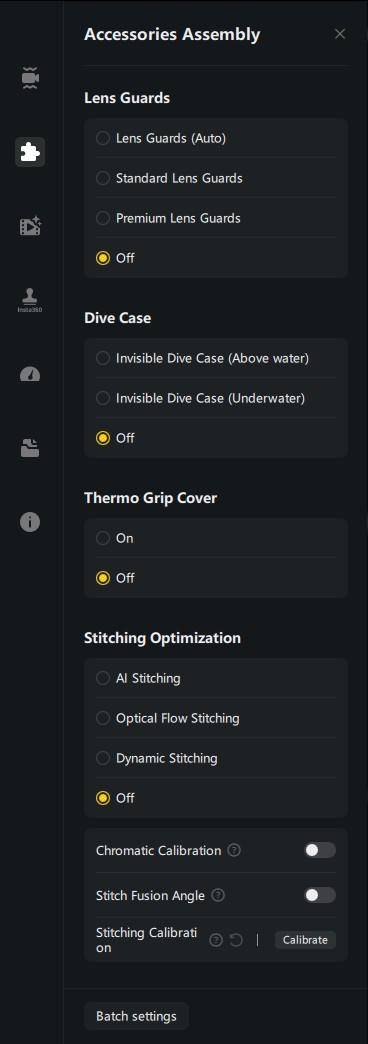
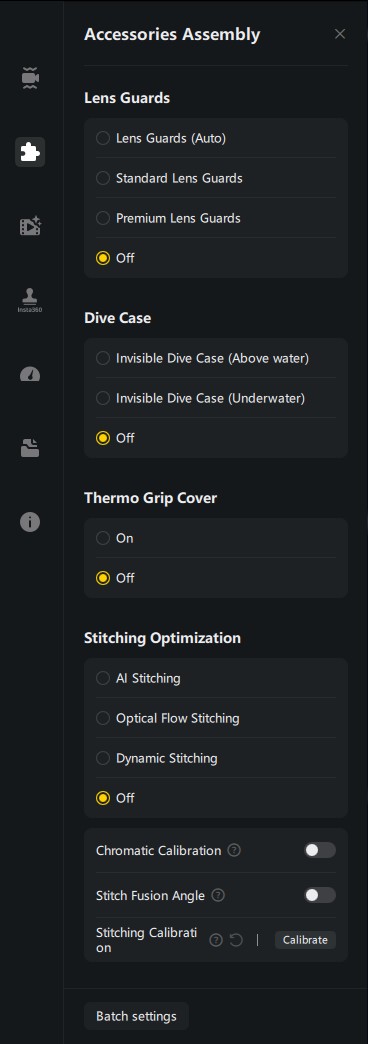
Navigate to the "Accessory Layout" tab and set the parameters according to the screenshot below.
-
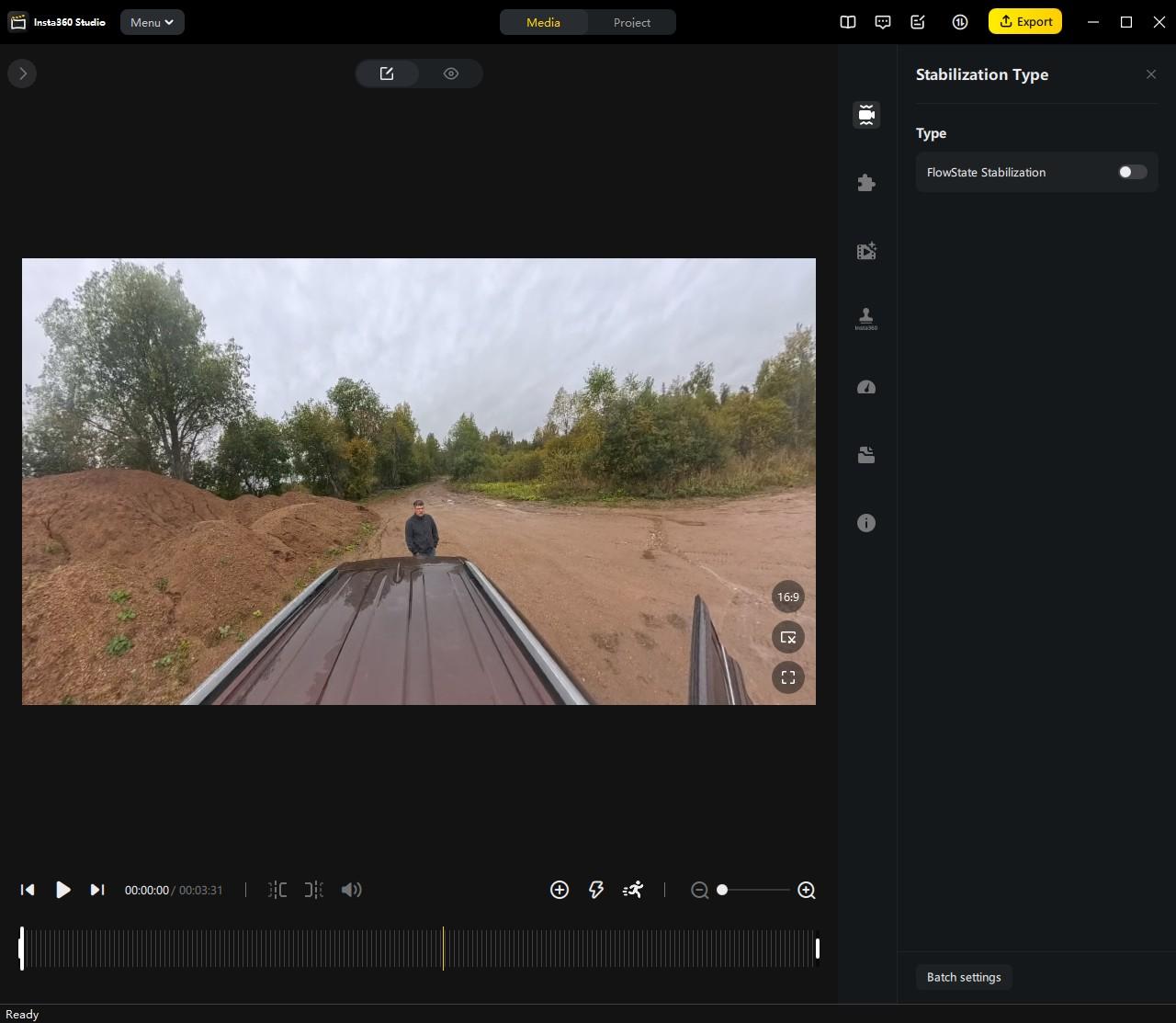
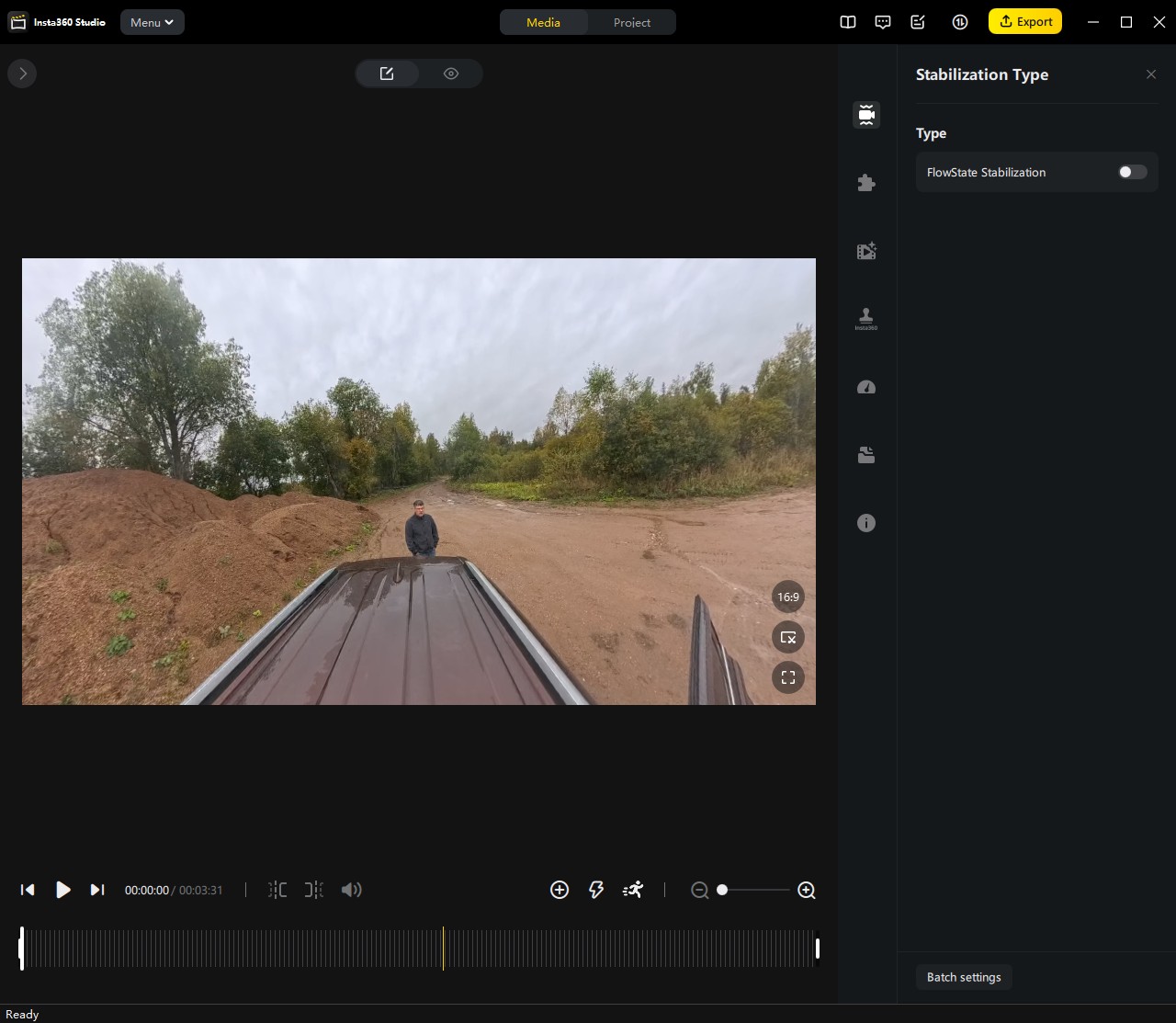
In the "Stabilization Type" tab, deactivate the "FlowState Stabilization" option by unchecking the corresponding box.
-
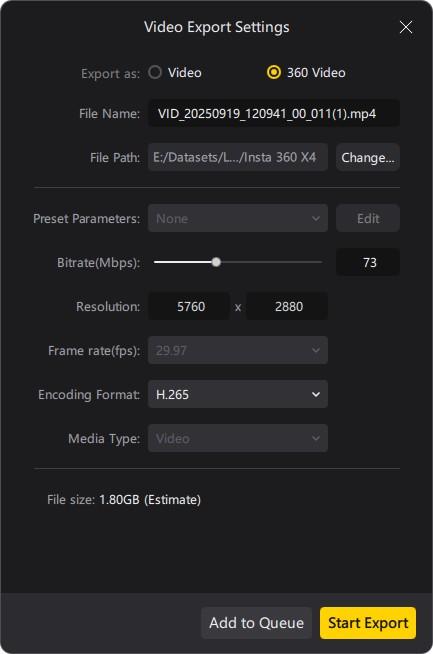
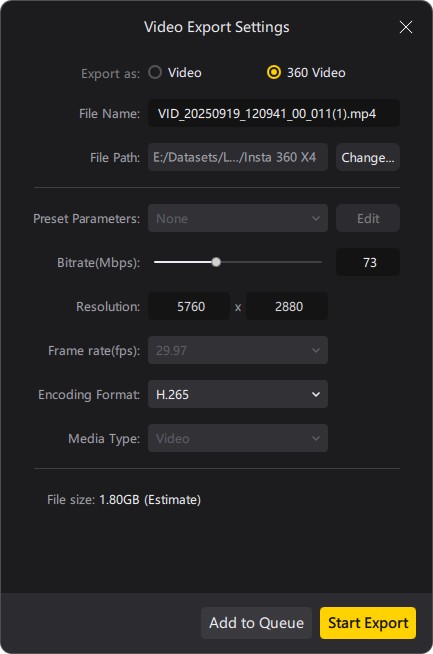
Initiate the export of the video file using the settings specified below into the folder containing the source *.lrv and *.insv files.
Point Cloud Coloring Process
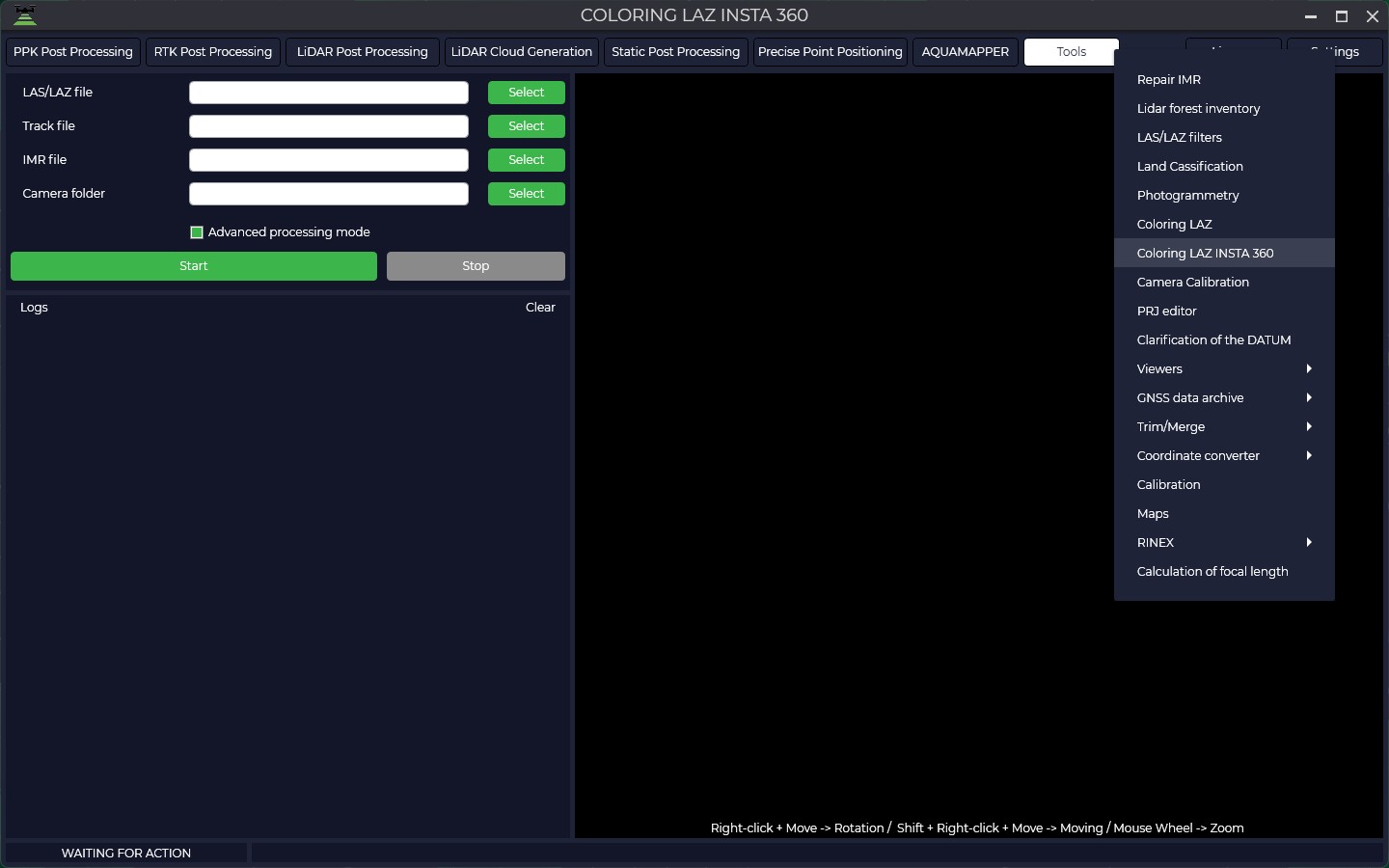
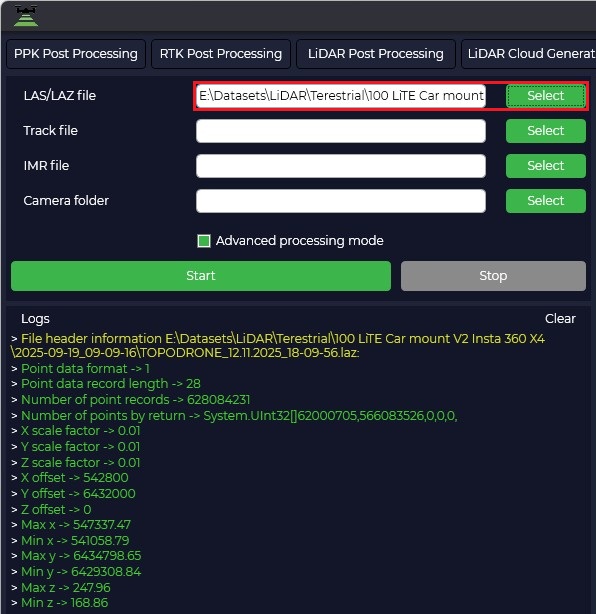
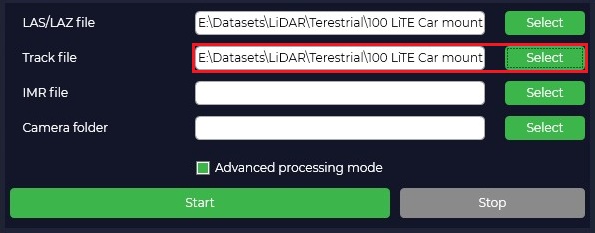
Specify the point cloud file in LAS/LAZ format, generated in the previous processing step in the "LiDAR Cloud Generation" module. This is an uncolored point cloud that contains spatial coordinates (X, Y, Z) and other laser information but lacks color attributes.
Select the trajectory file in the appropriate projection, obtained along with the point cloud from the "LiDAR Cloud Generation" module. The trajectory file contains precise coordinates and orientation of the scanning system at each moment in time. This data is critical for the temporal and spatial synchronization of frames with the cloud points.
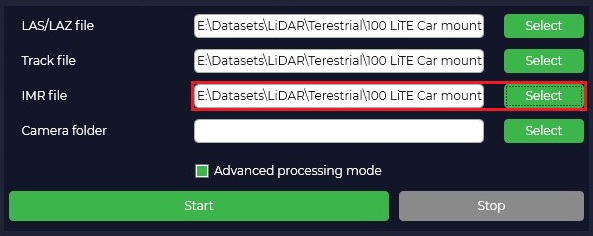
Load the Inertial Measurement Unit (IMU) data file.
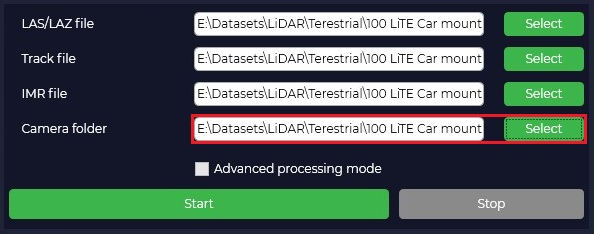
Specify the folder containing all the necessary video materials in *.lrv, *.insv, and *.mp4 formats.
Click the "Start" button to initiate the coloring algorithm.
The processing progress is displayed in the "Log" text window. This window outputs information messages, warnings, and errors.

The "Viewer" window displays the process of assigning colors to the point cloud points in real-time, allowing for visual control over the processing accuracy.
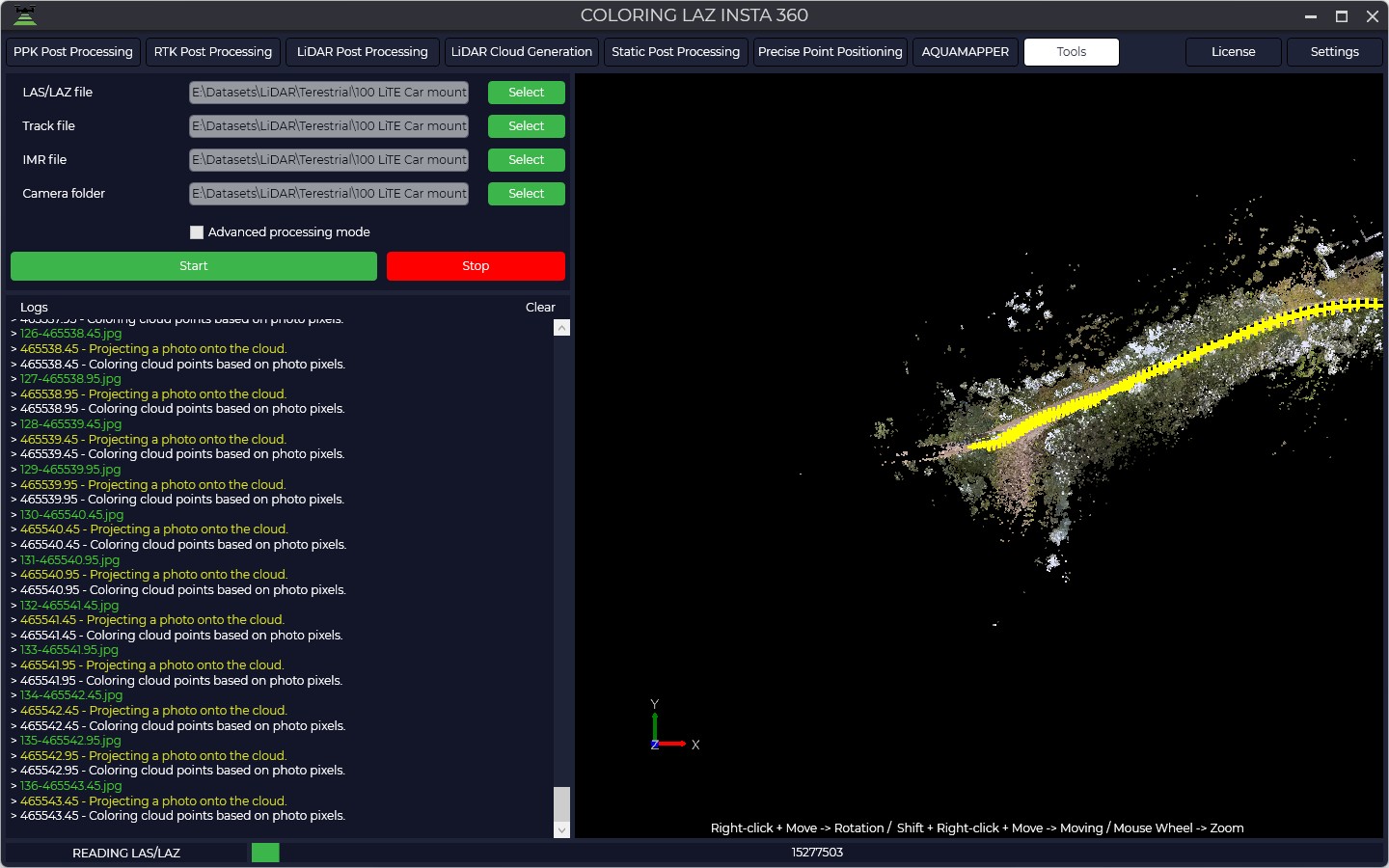
Upon successful completion of the process, the module will automatically create a new file of the colored point cloud. The file is saved in the same directory as the source cloud. The prefix _RGB is added to the source filename for identification. A folder named "Photo" will be created in the directory containing the video files; this folder will contain panoramic images georeferenced to the WGS-84 coordinate system.
No Comments